You might also like
- SFI Coding And Classification System A Complete Guide - 2021 EditionFrom EverandSFI Coding And Classification System A Complete Guide - 2021 EditionNo ratings yet
- Grid-Tied PV String Inverter: User ManualDocument40 pagesGrid-Tied PV String Inverter: User ManualIván UrbinaNo ratings yet
- Active Aeroelastic Wing: Improve Aircraft Maneuverability at Transonic and Supersonic SpeedsFrom EverandActive Aeroelastic Wing: Improve Aircraft Maneuverability at Transonic and Supersonic SpeedsNo ratings yet
- Crank Case VentilationDocument0 pagesCrank Case VentilationAnoj pahathkumburaNo ratings yet
- Waiting For Breakthrough in Conventional Submarine's Prime MoversDocument9 pagesWaiting For Breakthrough in Conventional Submarine's Prime MoversMukesh PadwalNo ratings yet
- GateRudder JMST 2015 PDFDocument13 pagesGateRudder JMST 2015 PDFθανασης ΓκιοκαςNo ratings yet
- MTU Submarine Charging Unit 12V 4000Document4 pagesMTU Submarine Charging Unit 12V 4000selleriverketNo ratings yet
- Submarine DesignDocument2 pagesSubmarine DesignEhsan AmiriNo ratings yet
- Engineman 3Document727 pagesEngineman 3eliecer100% (1)
- TOP-2-2-540 Testing of Unmanned Ground Vehicle (UGV) SystemsDocument39 pagesTOP-2-2-540 Testing of Unmanned Ground Vehicle (UGV) SystemsPavan Kumar BittuNo ratings yet
- Ada359226 PDFDocument28 pagesAda359226 PDFEray KoçNo ratings yet
- Propeller / Hull Status Report 2009Document17 pagesPropeller / Hull Status Report 2009torbjorn25No ratings yet
- Electromagnetic Aircraft Launch SystemDocument8 pagesElectromagnetic Aircraft Launch SystemRikhil Yalamanchi100% (1)
- Design & Performance Analysis of LSM For EMALS.Document52 pagesDesign & Performance Analysis of LSM For EMALS.dabrevipulNo ratings yet
- (Buckling) Analysis of A Submarine With Hull ImperfectionsDocument81 pages(Buckling) Analysis of A Submarine With Hull ImperfectionsJhon DonNo ratings yet
- Flight Vehicle Design Aircraft DesignDocument18 pagesFlight Vehicle Design Aircraft DesignKarthikeya ReddyNo ratings yet
- 30508Document36 pages30508Raphael Felipe Gama RibeiroNo ratings yet
- SUBCODE ASNE07 RevFDocument11 pagesSUBCODE ASNE07 RevFMatt GerdonNo ratings yet
- Electromagnetic Aircraft Launch SystemDocument10 pagesElectromagnetic Aircraft Launch SystemVed Prakash SinghNo ratings yet
- Navy Electrical Power Generating EquipmentDocument56 pagesNavy Electrical Power Generating EquipmentSpace_Hulker100% (3)
- Accessory DrivesDocument2 pagesAccessory Drivesbassumudhol100% (1)
- Ram JetDocument12 pagesRam JetParsa RahulNo ratings yet
- 002 PDFDocument6 pages002 PDFrsahu_36No ratings yet
- Submarine ReportDocument10 pagesSubmarine ReportShahzeb Bin TariqNo ratings yet
- Teza Doctorat Electric Ship Propulsion PDFDocument117 pagesTeza Doctorat Electric Ship Propulsion PDFpavelionut100% (1)
- A Practical Guide To Wig ModelsDocument12 pagesA Practical Guide To Wig Modelsdogbreath27No ratings yet
- (1944) Technical Manual TM 9-834 Vehicular General Purpose Unit EquipmentDocument110 pages(1944) Technical Manual TM 9-834 Vehicular General Purpose Unit EquipmentHerbert Hillary Booker 2ndNo ratings yet
- 2015 3 EN Nevesbu - Improving The Submarine Design Process One Tool at A TimeDocument6 pages2015 3 EN Nevesbu - Improving The Submarine Design Process One Tool at A TimebrufpotNo ratings yet
- High Level Architecture Based Simulation For Aircraft Carrier Deck Operations PDFDocument5 pagesHigh Level Architecture Based Simulation For Aircraft Carrier Deck Operations PDFjwpaprk1No ratings yet
- 3029 Steer Stab BR tcm92-8656Document26 pages3029 Steer Stab BR tcm92-8656Mullah FassudinNo ratings yet
- CH1 - Aircraft Diesel EngDocument8 pagesCH1 - Aircraft Diesel EngPJGD100% (1)
- Simulation of Hydrodynamic Ram During Impact of Fluid-Filled Tank Using SPHDocument85 pagesSimulation of Hydrodynamic Ram During Impact of Fluid-Filled Tank Using SPHagarmartNo ratings yet
- HovercraftDocument17 pagesHovercraftSathishkumar100% (1)
- Engine Design ClassificationDocument76 pagesEngine Design ClassificationLuis NunesNo ratings yet
- Analysis of Submarine With The Study of MechanicalDocument12 pagesAnalysis of Submarine With The Study of MechanicalAsser EhabNo ratings yet
- 12 Air Starting of Diesel EnginesDocument26 pages12 Air Starting of Diesel EnginesrajishrrrNo ratings yet
- Boat Ship Fundamentals of Naval Science Marine Propulsion Systems Including Steam PDFDocument63 pagesBoat Ship Fundamentals of Naval Science Marine Propulsion Systems Including Steam PDFtoshugoNo ratings yet
- CFD Analysis of Flow Through A Conical ExhaustDocument26 pagesCFD Analysis of Flow Through A Conical Exhaustrvnaveen26No ratings yet
- Rockets and Launch VehiclesDocument21 pagesRockets and Launch VehicleskevinNo ratings yet
- Valve Failure of Diesel EngineDocument17 pagesValve Failure of Diesel EnginejhpandiNo ratings yet
- Agosta-90B: Archived ReportDocument8 pagesAgosta-90B: Archived ReportThe Angry ManNo ratings yet
- MRS Maintenance Requirement System PDFDocument95 pagesMRS Maintenance Requirement System PDFrevelacionesNo ratings yet
- Hovercraft For In-Field Operation in Oil Palm Estate With Soft Ground AreasDocument4 pagesHovercraft For In-Field Operation in Oil Palm Estate With Soft Ground Areasdolyn96100% (1)
- Mil HDBK 502Document139 pagesMil HDBK 502Jayjean KwakNo ratings yet
- Australian Military Sales Catalogue 2018-02Document98 pagesAustralian Military Sales Catalogue 2018-02Victor Yañez0% (1)
- Wing in Ground EffectDocument36 pagesWing in Ground EffectMulti Science Gate MSGNo ratings yet
- ModernNaval Solutions - 2final - Ohmayer.nov 2012cDocument39 pagesModernNaval Solutions - 2final - Ohmayer.nov 2012cPriscila KImNo ratings yet
- A281747 PDFDocument55 pagesA281747 PDFRandyMcDeagNo ratings yet
- Spirit Elite ManualDocument24 pagesSpirit Elite ManualMoafarNo ratings yet
- The Sea ShadowDocument16 pagesThe Sea Shadowsea.shadowNo ratings yet
- 3 Piston EnginesDocument276 pages3 Piston EnginesLaith LaithNo ratings yet
- Rocket and Space Propulsion - Unit 1Document20 pagesRocket and Space Propulsion - Unit 1Lokanand DharmentharNo ratings yet
- Auv Electric Propulsion Subsea ModulesDocument2 pagesAuv Electric Propulsion Subsea ModulesMol MolNo ratings yet
- Wartsila 2005Document108 pagesWartsila 2005123habib123fikri100% (1)
- Hovercraft: For The Band, SeeDocument14 pagesHovercraft: For The Band, SeeAntormi Marimi100% (1)
- Volat Presentation EngDocument68 pagesVolat Presentation EngEdgardo Garcia100% (1)
- Basic Information TJ100 - AJ Revision 5Document12 pagesBasic Information TJ100 - AJ Revision 5Mohammad Lavasani100% (1)
- 13.IJAEST Vol No 11 Issue No 1 Analysis of LHR Extended Expansion Engine With Variable Speed Operation For Different Compression Ratios 121 128Document8 pages13.IJAEST Vol No 11 Issue No 1 Analysis of LHR Extended Expansion Engine With Variable Speed Operation For Different Compression Ratios 121 128slv_prasaadNo ratings yet
- Alvar VCR EngineDocument12 pagesAlvar VCR Enginevlad_paladeNo ratings yet
- Guidance Document For Fuel Burning Equipments and Air Pollution Control SystemsDocument95 pagesGuidance Document For Fuel Burning Equipments and Air Pollution Control Systemshafidhrahadiyan2No ratings yet
- Automatic Level Control SystemsDocument10 pagesAutomatic Level Control Systemshafidhrahadiyan2100% (1)
- Probing Questions To Help Students Think Critically About Reading (May Be Used As Tasks) Questions Which Probe Basic Understanding and PreparationDocument2 pagesProbing Questions To Help Students Think Critically About Reading (May Be Used As Tasks) Questions Which Probe Basic Understanding and Preparationhafidhrahadiyan2No ratings yet
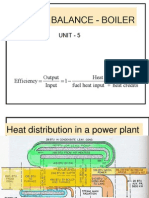
- Boiler Efficiency and CombustionDocument12 pagesBoiler Efficiency and Combustionhafidhrahadiyan2No ratings yet
- Boiler TypeDocument6 pagesBoiler TypeMochamad Fajar RamdaniNo ratings yet
- WE Inlastek 05A Visual ExaminationDocument30 pagesWE Inlastek 05A Visual Examinationhafidhrahadiyan2100% (1)
- Water Tube BoilersDocument8 pagesWater Tube Boilershafidhrahadiyan2No ratings yet
- Certification For ISM Code & ISPS Code: Safety Management System & Ship Security Management SystemDocument1 pageCertification For ISM Code & ISPS Code: Safety Management System & Ship Security Management Systemhafidhrahadiyan2No ratings yet
- Circulation Control CalculationDocument26 pagesCirculation Control Calculationhafidhrahadiyan2No ratings yet
- Lambda Presentation 2Document19 pagesLambda Presentation 2cossatotNo ratings yet
- MTU High Speed Diesel For WorkboatDocument3 pagesMTU High Speed Diesel For Workboathafidhrahadiyan2No ratings yet
- Formal Safety Assessment: Basic Glossary of TermsDocument7 pagesFormal Safety Assessment: Basic Glossary of Termshafidhrahadiyan2No ratings yet
- Heat BalanceDocument18 pagesHeat Balancehafidhrahadiyan2No ratings yet
- Space Tourism Is Space Travel For RecreationalDocument7 pagesSpace Tourism Is Space Travel For Recreationalhafidhrahadiyan2No ratings yet
- Space Tourism Is Space Travel For RecreationalDocument7 pagesSpace Tourism Is Space Travel For Recreationalhafidhrahadiyan2No ratings yet
- WDP Process Diagrams v1Document6 pagesWDP Process Diagrams v1Ryan HengNo ratings yet
- Pin Joint en PDFDocument1 pagePin Joint en PDFCicNo ratings yet
- Decision Tree AlgorithmDocument22 pagesDecision Tree Algorithmvani_V_prakashNo ratings yet
- sp.1.3.3 Atoms,+Elements+&+Molecules+ActivityDocument4 pagessp.1.3.3 Atoms,+Elements+&+Molecules+ActivityBryaniNo ratings yet
- " Suratgarh Super Thermal Power Station": Submitted ToDocument58 pages" Suratgarh Super Thermal Power Station": Submitted ToSahuManishNo ratings yet
- CH 2 PDFDocument85 pagesCH 2 PDFSajidNo ratings yet
- ShopDrawings - Part 1Document51 pagesShopDrawings - Part 1YapNo ratings yet
- The Ins and Outs Indirect OrvinuDocument8 pagesThe Ins and Outs Indirect OrvinusatishNo ratings yet
- New Cisco Certification Path (From Feb2020) PDFDocument1 pageNew Cisco Certification Path (From Feb2020) PDFkingNo ratings yet
- ILI9481 DatasheetDocument143 pagesILI9481 DatasheetdetonatNo ratings yet
- English For Law Part 1 Sept 2021Document23 pagesEnglish For Law Part 1 Sept 2021Gina Ayu ApridarisaNo ratings yet
- Boq Cme: 1 Pole Foundation Soil WorkDocument1 pageBoq Cme: 1 Pole Foundation Soil WorkyuwonoNo ratings yet
- Acdc - DC Motor - Lecture Notes 5Document30 pagesAcdc - DC Motor - Lecture Notes 5Cllyan ReyesNo ratings yet
- 3Document76 pages3Uday ShankarNo ratings yet
- 1 Lesson Plan Self Assessment 1Document1 page1 Lesson Plan Self Assessment 1Neha SharmaNo ratings yet
- Introduction To Templates in C++Document16 pagesIntroduction To Templates in C++hammarbytpNo ratings yet
- A History of The Ecological Sciences, Part 1 - Early Greek OriginsDocument6 pagesA History of The Ecological Sciences, Part 1 - Early Greek OriginskatzbandNo ratings yet
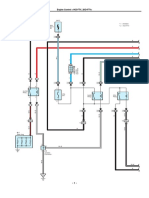
- Diagrama Hilux 1KD-2KD PDFDocument11 pagesDiagrama Hilux 1KD-2KD PDFJeni100% (1)
- Main-A5-Booklet (Spreads) PDFDocument12 pagesMain-A5-Booklet (Spreads) PDFanniyahNo ratings yet
- IJISRT23JUL645Document11 pagesIJISRT23JUL645International Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Cockpit System Questions - FlattenedDocument85 pagesSmart Cockpit System Questions - FlattenedBarut Brkk100% (4)
- Benchmark Leadership Philosphy Ead 501Document5 pagesBenchmark Leadership Philosphy Ead 501api-494301924No ratings yet
- Stellite 6 FinalDocument2 pagesStellite 6 FinalGumersindo MelambesNo ratings yet
- Concise Beam DemoDocument33 pagesConcise Beam DemoluciafmNo ratings yet
- IMS - Integrated Management System Implementation Steps-Sterling - Rev00-240914 PDFDocument28 pagesIMS - Integrated Management System Implementation Steps-Sterling - Rev00-240914 PDFNorman AinomugishaNo ratings yet
- BS en 50216-6 2002Document18 pagesBS en 50216-6 2002Jeff Anderson Collins100% (3)
- Projected Costs of Generating Electricity (EGC) 2005Document233 pagesProjected Costs of Generating Electricity (EGC) 2005susantojdNo ratings yet
- 1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFDocument173 pages1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFRayyan MalikNo ratings yet
- SUNGLAO - TM PortfolioDocument60 pagesSUNGLAO - TM PortfolioGIZELLE SUNGLAONo ratings yet
- Revised PARA Element2 Radio LawsDocument81 pagesRevised PARA Element2 Radio LawsAurora Pelagio Vallejos100% (4)