You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Ge 020306Document2 pagesGe 020306Felipe PereiraNo ratings yet
- On The Mechanics of Structured Sands: Cuccovillo, T. & Coop, M. R. (1999) - Geâotechnique 49, No. 6, 741 760Document20 pagesOn The Mechanics of Structured Sands: Cuccovillo, T. & Coop, M. R. (1999) - Geâotechnique 49, No. 6, 741 760Felipe PereiraNo ratings yet
- Mineralogical Composition in Relation To The Properties of Certain SoilsDocument9 pagesMineralogical Composition in Relation To The Properties of Certain SoilsFelipe PereiraNo ratings yet
- FHWA ICDM Workshop - Intelligent Compaction Data ManagementDocument2 pagesFHWA ICDM Workshop - Intelligent Compaction Data ManagementFelipe PereiraNo ratings yet
- Ge 490607Document10 pagesGe 490607Felipe PereiraNo ratings yet
- Ge 440104Document18 pagesGe 440104Felipe PereiraNo ratings yet
- Ge 010204Document14 pagesGe 010204Felipe PereiraNo ratings yet
- Ge 360103Document6 pagesGe 360103Felipe PereiraNo ratings yet
- Ge 440103Document30 pagesGe 440103Felipe PereiraNo ratings yet
- Ge 360101Document9 pagesGe 360101Felipe PereiraNo ratings yet
- Ge490608 PDFDocument6 pagesGe490608 PDFFelipe PereiraNo ratings yet
- Ge 360102Document15 pagesGe 360102Felipe PereiraNo ratings yet
- Ge 440106Document9 pagesGe 440106Felipe PereiraNo ratings yet
- Ge 440111Document6 pagesGe 440111Felipe PereiraNo ratings yet
- Energy Dissipation in Inelastic Flow of Saturated Cohesionless Granular MediaDocument19 pagesEnergy Dissipation in Inelastic Flow of Saturated Cohesionless Granular MediasstibisNo ratings yet
- Pore Pressures and Strains After Repeated Loading of Saturated Clay: ReplyDocument2 pagesPore Pressures and Strains After Repeated Loading of Saturated Clay: ReplyFelipe PereiraNo ratings yet
- Ge 490602Document13 pagesGe 490602Felipe PereiraNo ratings yet
- Errata: Pore Pressures and Strains After Repeated Loading of Saturated ClayDocument1 pageErrata: Pore Pressures and Strains After Repeated Loading of Saturated ClayFelipe PereiraNo ratings yet
- A New Technique For Reduction of Excess Pore Pressure During Pile Driving: DiscussionDocument3 pagesA New Technique For Reduction of Excess Pore Pressure During Pile Driving: DiscussionFelipe PereiraNo ratings yet
- Brazilian Tensile Test For Soils: Reply: G. KrishnayyaDocument1 pageBrazilian Tensile Test For Soils: Reply: G. KrishnayyaFelipe PereiraNo ratings yet
- Prediction of Pile Performance in Permafrost Under Lateral LoadDocument14 pagesPrediction of Pile Performance in Permafrost Under Lateral LoadFelipe PereiraNo ratings yet
- Salvage of Heavy Construction Equipment by A Floating Ice BridgeDocument12 pagesSalvage of Heavy Construction Equipment by A Floating Ice BridgeFelipe PereiraNo ratings yet
- The Presence and Influence of Fissures in The Boulder Clays of West Central ScotlandDocument14 pagesThe Presence and Influence of Fissures in The Boulder Clays of West Central ScotlandFelipe PereiraNo ratings yet
- Reply To The Discussion by A.C. Londono On "Response of A Residual Soil Slope To Rainfall"Document1 pageReply To The Discussion by A.C. Londono On "Response of A Residual Soil Slope To Rainfall"Felipe PereiraNo ratings yet
- Discussion of "Response of A Residual Soil Slope To Rainfall"Document5 pagesDiscussion of "Response of A Residual Soil Slope To Rainfall"Felipe PereiraNo ratings yet
- 2006 43 1042Document19 pages2006 43 1042Felipe PereiraNo ratings yet
- Erratum: A Three-Dimenstional Slope Stability Problem in ClayDocument1 pageErratum: A Three-Dimenstional Slope Stability Problem in ClayFelipe PereiraNo ratings yet
- Stress-Strain Behaviour of Weathered Weak Rock in Middle-Sized Triaxial TestsDocument9 pagesStress-Strain Behaviour of Weathered Weak Rock in Middle-Sized Triaxial TestsFelipe PereiraNo ratings yet
- Soil Mechanics.: ReviewsDocument1 pageSoil Mechanics.: ReviewsFelipe PereiraNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Downstream - Processing - Lecture 5rnjDocument8 pagesDownstream - Processing - Lecture 5rnjqwertyuNo ratings yet
- Introduction To Batteries - BatteryDocument17 pagesIntroduction To Batteries - BatteryJ dixojoNo ratings yet
- Huawei PI OverviewDocument15 pagesHuawei PI OverviewHdz EdilNo ratings yet
- Diesel Power PlantDocument6 pagesDiesel Power Plantalvin bautistaNo ratings yet
- SPE 69708 Experiences Using An ESP Application On Heavy-Oil Cold-Production Automation in Eastern Venezuela FieldsDocument3 pagesSPE 69708 Experiences Using An ESP Application On Heavy-Oil Cold-Production Automation in Eastern Venezuela FieldsM.No ratings yet
- Laydown Light Towers: LED/Metal Halide/LED BalloonDocument2 pagesLaydown Light Towers: LED/Metal Halide/LED BalloonAugusto BellezaNo ratings yet
- WP 3325 B 3 - 5 Basbooster Incl. N - Pack: Technical DataDocument2 pagesWP 3325 B 3 - 5 Basbooster Incl. N - Pack: Technical DataMarcos AssialdiNo ratings yet
- Atomic Nucleus Facts and ConceptsDocument24 pagesAtomic Nucleus Facts and ConceptsKashyap PatelNo ratings yet
- O Level Physics 2018 Past PaperDocument20 pagesO Level Physics 2018 Past PaperfordalNo ratings yet
- Smoke Control: Section 4/chapter 12Document12 pagesSmoke Control: Section 4/chapter 12Ramyaa LakshmiNo ratings yet
- Nseallcompanies 31122020Document78 pagesNseallcompanies 31122020guy fawkesNo ratings yet
- Vat Rates enDocument27 pagesVat Rates enpacocastroNo ratings yet
- Numerical Study of The Unsteady Aerodynamics of Rotating SeedsDocument6 pagesNumerical Study of The Unsteady Aerodynamics of Rotating SeedsademargcjuniorNo ratings yet
- Feed Mill InfoDocument33 pagesFeed Mill InfoSapelNo ratings yet
- 3TNV70 ASA BroDocument1 page3TNV70 ASA BroSaMos AdRiianNo ratings yet
- Compressor Station MallnowDocument8 pagesCompressor Station MallnowMANIU RADU-GEORGIANNo ratings yet
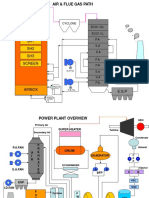
- Air & Flue Gas Path CFBCDocument2 pagesAir & Flue Gas Path CFBCJAY PARIKHNo ratings yet
- Chapter 1Document27 pagesChapter 1Omotayo PaulNo ratings yet
- Karthik Krishna Resume Oct2014Document3 pagesKarthik Krishna Resume Oct2014kkrish13No ratings yet
- Fundamental Laws of Chemistry Explained Atomic Theory DevelopmentDocument10 pagesFundamental Laws of Chemistry Explained Atomic Theory DevelopmentDonni MaruliNo ratings yet
- Xenon Short Arc Lamps: Light Source XE150 (650-0091)Document2 pagesXenon Short Arc Lamps: Light Source XE150 (650-0091)Abhishek GuddadNo ratings yet
- Ductable Fan Coil Unit: Product Selection DataDocument26 pagesDuctable Fan Coil Unit: Product Selection DataNelson MartinsNo ratings yet
- Cutting Torch InstructionDocument2 pagesCutting Torch Instructionfoxtrot mikeNo ratings yet
- PH1031 Wednesday Batch July-Dec 2016Document2 pagesPH1031 Wednesday Batch July-Dec 2016devajithNo ratings yet
- GrimmerSchmidt CompressorsDocument43 pagesGrimmerSchmidt CompressorsJulioCalderonOrtiz73% (11)
- Equivalent Circuits and Parameters of Power System Plant: Network Protection & Automation GuideDocument38 pagesEquivalent Circuits and Parameters of Power System Plant: Network Protection & Automation GuideShailesh ChettyNo ratings yet
- Came 1998Document18 pagesCame 1998pradeepsmart1988100% (1)
- Tryptone Broth: Code Description SizeDocument2 pagesTryptone Broth: Code Description SizeSeaGate IvyBridge MsiNvidiaNo ratings yet
- GM ST 382B 85 1985 Light Duty Truck CKGP Series Service Manual 1984 Revision PagesDocument55 pagesGM ST 382B 85 1985 Light Duty Truck CKGP Series Service Manual 1984 Revision PagesBrian NormanNo ratings yet