You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- CHC33015-Sub 1 AssessmentDocument102 pagesCHC33015-Sub 1 AssessmentMaimuna100% (8)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- How To Unlock An Iphone For Free Best MethodDocument5 pagesHow To Unlock An Iphone For Free Best MethodChristense50% (4)
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- A Review of Cybersecurity As An Effective Tool For Fighting Identity Theft Across The United StatesDocument12 pagesA Review of Cybersecurity As An Effective Tool For Fighting Identity Theft Across The United StatesJames MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Sliding Window Sum Algorithms For Deep Neural NetworksDocument8 pagesSliding Window Sum Algorithms For Deep Neural NetworksJames MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- Investigating The Future of Engineer of 2020' Attributes: Moving From Access To Engagement & Sense of BelongingDocument11 pagesInvestigating The Future of Engineer of 2020' Attributes: Moving From Access To Engagement & Sense of BelongingJames MorenoNo ratings yet
- A New Method To Explore The Integer Partition ProblemDocument9 pagesA New Method To Explore The Integer Partition ProblemJames MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- Improving User Experience With Online Learning Using Analytical Comparasions Between Instructors & Students of Qatar UniversityDocument26 pagesImproving User Experience With Online Learning Using Analytical Comparasions Between Instructors & Students of Qatar UniversityJames MorenoNo ratings yet
- Advancesin Vision Computing:An International Journal (AVC) : Call For PapersDocument2 pagesAdvancesin Vision Computing:An International Journal (AVC) : Call For PapersAnonymous zsOsFoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Scope & Topics: ISSN: 0976-9404 (Online) 2229-3949 (Print)Document2 pagesScope & Topics: ISSN: 0976-9404 (Online) 2229-3949 (Print)ijgcaNo ratings yet
- Advancesin Vision Computing:An International Journal (AVC) : Call For PapersDocument2 pagesAdvancesin Vision Computing:An International Journal (AVC) : Call For PapersAnonymous zsOsFoNo ratings yet
- International Journal of Game Theory and Technology (IJGTT)Document2 pagesInternational Journal of Game Theory and Technology (IJGTT)CS & ITNo ratings yet
- Call For Papers - InformaticsEngineering, anInternationalJournal (IEIJ)Document2 pagesCall For Papers - InformaticsEngineering, anInternationalJournal (IEIJ)Anonymous w6iqRPANo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Teaching and Learning With Ict Tools: Issues and ChallengesDocument8 pagesTeaching and Learning With Ict Tools: Issues and ChallengesJames MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- Rehabilitation EngineeringDocument6 pagesRehabilitation EngineeringMOHAMMED ABUBACKER SIDDIQ ANo ratings yet
- Stok Devstore-BaliDocument2 pagesStok Devstore-Baliolong teaNo ratings yet
- Cashify Whitepaper 2020Document28 pagesCashify Whitepaper 2020poorawsiasNo ratings yet
- 2022 Jce Summary of Provisional Results Final Report Final 2022Document43 pages2022 Jce Summary of Provisional Results Final Report Final 2022Wä møxãvá grætérkíørkzñ KìddâNo ratings yet
- Orthopedic Impairment PDFDocument15 pagesOrthopedic Impairment PDFjoan arreolaNo ratings yet
- TelecomandaDocument31 pagesTelecomandaMstefNo ratings yet
- Lpe2501 Lecture Notes 1 (Week 1 - 5)Document36 pagesLpe2501 Lecture Notes 1 (Week 1 - 5)umaNo ratings yet
- The Evolution of Mobile PhonesDocument2 pagesThe Evolution of Mobile PhonesRio P. MaratasNo ratings yet
- ChatGPT For Visually Impaired and BlindDocument9 pagesChatGPT For Visually Impaired and BlindSana Zubair OfficalNo ratings yet
- Robot DawDocument66 pagesRobot DawJhilbert PhephelioNo ratings yet
- The Clearing House: A Journal of Educational Strategies, Issues and IdeasDocument6 pagesThe Clearing House: A Journal of Educational Strategies, Issues and IdeasAneliza TangonanNo ratings yet
- Level of Efficiency in Reading and Writing StenographyDocument5 pagesLevel of Efficiency in Reading and Writing Stenographyice chaserNo ratings yet
- Educ 7 ReviewerDocument37 pagesEduc 7 ReviewerRalph Raymond CervantesNo ratings yet
- Hand Gesture Controlled WheelchairDocument131 pagesHand Gesture Controlled WheelchairAlvinRaymundo75% (4)
- Assessment of Assistive Technology in An Academic LibraryDocument14 pagesAssessment of Assistive Technology in An Academic Libraryapi-469824583No ratings yet
- DishwasherDocument3 pagesDishwasherAnil Kumar SinghNo ratings yet
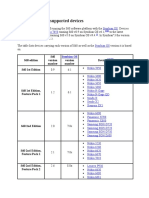
- S60 Versions and Supported DevicesDocument4 pagesS60 Versions and Supported DevicesPutu OkayanaNo ratings yet
- Medical Student Assessment Form in PDFDocument4 pagesMedical Student Assessment Form in PDFDanial S. SaktiNo ratings yet
- VecLife Summer 2013Document24 pagesVecLife Summer 2013VictoriaPDFNo ratings yet
- Mobility Devices Product Manual Effective Date - November 02, 2020Document135 pagesMobility Devices Product Manual Effective Date - November 02, 2020Stacey MinNo ratings yet
- User GuideDocument280 pagesUser Guidescribd.5.harley-davidsonNo ratings yet
- Technology and Well-Being-An Evocative Essay: ArticleDocument25 pagesTechnology and Well-Being-An Evocative Essay: Articlebongsphl43No ratings yet
- Using Technology by Special Education Teacher in ClassroomsDocument12 pagesUsing Technology by Special Education Teacher in ClassroomsEvery Special ChildNo ratings yet
- Assistive TechnologyDocument3 pagesAssistive Technologyapi-547693573No ratings yet
- Universal Remote ManualDocument2 pagesUniversal Remote ManualAriano JacqueNo ratings yet
- Multi Directional Mediation and The Use of Screen Readers by Persons With Visual Impairments in Bamenda, CameroonDocument7 pagesMulti Directional Mediation and The Use of Screen Readers by Persons With Visual Impairments in Bamenda, CameroonEditor IJTSRDNo ratings yet
- ICT Technologies To Carter To Needs of Children With Special NeedsDocument37 pagesICT Technologies To Carter To Needs of Children With Special NeedsSaba MominNo ratings yet
- Ic List IrtcishopDocument24 pagesIc List Irtcishopmory kh100% (1)