You might also like
- Meritor ABS TrainingDocument108 pagesMeritor ABS Trainingford62b100% (3)
- Science MasterkeyDocument287 pagesScience MasterkeyDinesh75% (4)
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Semi-Active Suspension Control Design for VehiclesFrom EverandSemi-Active Suspension Control Design for VehiclesRating: 5 out of 5 stars5/5 (1)
- Oil Country Tubing Spider Manual and Parts ListsDocument52 pagesOil Country Tubing Spider Manual and Parts ListsjohnfcortesNo ratings yet
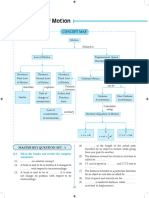
- Laws of MotionDocument18 pagesLaws of MotionJhen BonNo ratings yet
- Laws of Motion - NewtonDocument17 pagesLaws of Motion - NewtonpseudonimNo ratings yet
- Low Cost Hobby Servo XY TableDocument16 pagesLow Cost Hobby Servo XY TableJBarreto2No ratings yet
- Introduction to String Theory: Motivation and OverviewDocument177 pagesIntroduction to String Theory: Motivation and OverviewMatt Van'HeusenNo ratings yet
- Big-Ski Assembly ManualDocument46 pagesBig-Ski Assembly Manualmartin_powell_15No ratings yet
- Servo MotorsDocument8 pagesServo MotorsFairos ZakariahNo ratings yet
- A Quick Introduction To Tensor Analysis - R. SharipovDocument47 pagesA Quick Introduction To Tensor Analysis - R. SharipovPhan Someta100% (2)
- Serv7106 V09N02 TXTDocument44 pagesServ7106 V09N02 TXTmario saavedra tarazonaNo ratings yet
- Torque SensorDocument6 pagesTorque SensorBayu Ari MurtiNo ratings yet
- Robotshop Multi Purpose Robotic Arm GuideDocument20 pagesRobotshop Multi Purpose Robotic Arm GuidehutiogNo ratings yet
- Robot-B ER - IXDocument54 pagesRobot-B ER - IXDuy Hưng100% (1)
- JP-580 Industrial Control Balancing Machine Operation ManualDocument48 pagesJP-580 Industrial Control Balancing Machine Operation Manualivan cardenas quito50% (2)
- Turbine Supervisory System TSIDocument39 pagesTurbine Supervisory System TSImgkvprNo ratings yet
- Zeiss225bosello TechnicalDescriptionDocument42 pagesZeiss225bosello TechnicalDescriptionMuthu Selvam100% (1)
- Micrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsFrom EverandMicrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsNo ratings yet
- RHRS-2005RC - River Radar - Installation Manual PDFDocument41 pagesRHRS-2005RC - River Radar - Installation Manual PDFGeta Enache83% (6)
- Laws of Motion Chapter SolutionsDocument158 pagesLaws of Motion Chapter Solutionsfociwe75% (4)
- Cowells Manuals PDFDocument16 pagesCowells Manuals PDFpedjaNo ratings yet
- General Physics12 Quarter 1 Module 5Document35 pagesGeneral Physics12 Quarter 1 Module 5Ace GutierrezNo ratings yet
- Scorbot Er4u User ManualDocument41 pagesScorbot Er4u User Manualdaniel2442No ratings yet
- Lab 2 Moment of InertiaDocument10 pagesLab 2 Moment of InertiaChing Wai Yong100% (1)
- Tutorial Completo Stepper SKCDocument52 pagesTutorial Completo Stepper SKCricwerNo ratings yet
- Let Review Questions With AnswersDocument54 pagesLet Review Questions With AnswersTardio ChennNo ratings yet
- SP80 SP80H Technical PaperDocument10 pagesSP80 SP80H Technical PaperRatnesh BafnaNo ratings yet
- CF1711 - Trocador AtcDocument24 pagesCF1711 - Trocador Atcmec04162No ratings yet
- Thrust Position, Differential Expansion, and Rod Position Monitor SpecificationsDocument1 pageThrust Position, Differential Expansion, and Rod Position Monitor SpecificationsTu PhamNo ratings yet
- Ifu Tksa 40 - mp5362Document432 pagesIfu Tksa 40 - mp5362JeffersonDeOliveiraFerreiraNo ratings yet
- Operation Part 2 TradDocument19 pagesOperation Part 2 Tradcodruta_holtzNo ratings yet
- SynopsisDocument12 pagesSynopsisGopal AggarwalNo ratings yet
- Me 8950 PascoDocument52 pagesMe 8950 PascozhrepicNo ratings yet
- c20547 PDFDocument34 pagesc20547 PDFGuillermo Andrés CoupeNo ratings yet
- L 500 600 Mechanical Installation GuideDocument38 pagesL 500 600 Mechanical Installation GuideDan MoldovanNo ratings yet
- Brookfield Dial ViscometerDocument35 pagesBrookfield Dial ViscometerSheila Martinez0% (1)
- Spherosyn and Microsyn Installation Manual PDFDocument19 pagesSpherosyn and Microsyn Installation Manual PDFkxkvi1274502No ratings yet
- Articulated Arms Brochure - AtlasDocument12 pagesArticulated Arms Brochure - Atlasyudo0807No ratings yet
- Actuator 657Document24 pagesActuator 657DineshNo ratings yet
- Me 8951Document49 pagesMe 8951JHONNATHANCOLMENARESNo ratings yet
- Brookfield Dial Viscometer Operating InstructionsDocument35 pagesBrookfield Dial Viscometer Operating InstructionsTatiana GadelhaNo ratings yet
- Belt Routing GuideDocument87 pagesBelt Routing GuideBYRONGOSNo ratings yet
- Lab Report 08 Applying Non-Destructive Analysis Techniques For Assets Health Assessment Using Predictive Maintenance StrategyDocument8 pagesLab Report 08 Applying Non-Destructive Analysis Techniques For Assets Health Assessment Using Predictive Maintenance StrategyImdad Jalali100% (1)
- SatFlower I6 User Manual V1.0Document62 pagesSatFlower I6 User Manual V1.0Nithin Raj KNo ratings yet
- Station HandlingDocument1 pageStation Handlingabdel aramilNo ratings yet
- AHRS400 Series Users Manual 7430-0004-03 ADocument42 pagesAHRS400 Series Users Manual 7430-0004-03 AAlex LopezNo ratings yet
- Mechatronics PDFDocument18 pagesMechatronics PDFnirajNo ratings yet
- Service Manual: Color MonitorDocument44 pagesService Manual: Color MonitorAntonio AscanioNo ratings yet
- Design and Development of A Servo Control System For Arduino Uno Based Bird Drone MechanicsDocument6 pagesDesign and Development of A Servo Control System For Arduino Uno Based Bird Drone MechanicsDEPARTEMEN RUDALNo ratings yet
- Horizontal In-Place MEMS Inclinometer ICB0032HDocument2 pagesHorizontal In-Place MEMS Inclinometer ICB0032HCristian StenbergNo ratings yet
- Repeater Compass System With Serial Interface RS 422: Operator, Technical and Service ManualDocument62 pagesRepeater Compass System With Serial Interface RS 422: Operator, Technical and Service Manualthien9999kraNo ratings yet
- Anthron Descender Instruction Manual - enDocument8 pagesAnthron Descender Instruction Manual - engaschmidt1No ratings yet
- LAB Report 7Document18 pagesLAB Report 7razakhan5114No ratings yet
- Monitor AOCDocument60 pagesMonitor AOCRoland A. LeiteNo ratings yet
- Wheel Detector Installation Manual PDFDocument49 pagesWheel Detector Installation Manual PDFDimitris GiannakakisNo ratings yet
- Telestar 60AZ-A PDFDocument8 pagesTelestar 60AZ-A PDFFlih Slimen Flih SlimenNo ratings yet
- Online HDM690Document20 pagesOnline HDM690Kyle SchwulstNo ratings yet
- 04 - Rollover Protection SystemsDocument27 pages04 - Rollover Protection SystemsSimon SimonNo ratings yet
- ToolexVises PDFDocument44 pagesToolexVises PDFdiegomilitojNo ratings yet
- Local ProbesDocument87 pagesLocal Probessujiv_sujiv1278No ratings yet
- Brief Guide to RC ServosDocument7 pagesBrief Guide to RC ServosRodrigo OrtizNo ratings yet
- LAB 2-AngeladaDocument20 pagesLAB 2-AngeladaAlehamarie AngeladaNo ratings yet
- Docslide - Us - d551v 2cd 1 A Service ManualDocument53 pagesDocslide - Us - d551v 2cd 1 A Service ManualMarceloMazurNo ratings yet
- CM P1 11643 en SKF Microlog Accessories CatalogDocument100 pagesCM P1 11643 en SKF Microlog Accessories Catalogfabianocoorrea2000No ratings yet
- MAGPOWR Tension Sensors Manual 850A260Document8 pagesMAGPOWR Tension Sensors Manual 850A260Jose CeballosNo ratings yet
- Experimenting in the Atomic WorldDocument1 pageExperimenting in the Atomic WorldscrusnNo ratings yet
- Atomic World HW 5Document1 pageAtomic World HW 5scrusnNo ratings yet
- QM EngineersDocument324 pagesQM EngineersAnonymous PKVCsGNo ratings yet
- Damped and Forced OscillationsDocument32 pagesDamped and Forced OscillationsscrusnNo ratings yet
- COMM645 - Gephi HandoutDocument4 pagesCOMM645 - Gephi HandoutzepanNo ratings yet
- Gephi Tutorial Quick StartDocument32 pagesGephi Tutorial Quick StartyiorgisNo ratings yet
- Ballistic Pendulum Manual ME 6830Document62 pagesBallistic Pendulum Manual ME 6830Kamchatka TacalaskaNo ratings yet
- FockDocument6 pagesFockscrusnNo ratings yet
- Economy Force Sensor Manual CI 6746Document6 pagesEconomy Force Sensor Manual CI 6746scrusnNo ratings yet
- ZeemanDocument26 pagesZeemanscrusnNo ratings yet
- Hard Interactions of Quarks and Gluons A Primer For LHC PhysicsDocument118 pagesHard Interactions of Quarks and Gluons A Primer For LHC PhysicsscrusnNo ratings yet
- Reitz, Foundations of Electromagnetic Theory 1stDocument390 pagesReitz, Foundations of Electromagnetic Theory 1stscrusnNo ratings yet
- Chapter IDocument31 pagesChapter IAnte Z RedsNo ratings yet
- Compare Aristotelian and Galilean conceptions of motionDocument3 pagesCompare Aristotelian and Galilean conceptions of motionRachel DollisonNo ratings yet
- Physics GRADE1Document26 pagesPhysics GRADE1romaehab201912No ratings yet
- SPH 110 - Full NotesDocument101 pagesSPH 110 - Full NotesErick Wangila WanyonyiNo ratings yet
- Final Year Report: Kinetic Energy Recovery SystemDocument108 pagesFinal Year Report: Kinetic Energy Recovery SystemSam Wing Hong33% (3)
- Force and Motion: Important TermsDocument14 pagesForce and Motion: Important TermsFelicity Manalo100% (1)
- Laws of Motion: Comparing Aristotle and Galileo's ViewsDocument13 pagesLaws of Motion: Comparing Aristotle and Galileo's Viewsjal bayani0% (1)
- Detailed LP G8 Laws of MotionDocument9 pagesDetailed LP G8 Laws of MotionJoy MonteroNo ratings yet
- Physics Mid Topic Test Revision 2023 SOLUTIONSDocument4 pagesPhysics Mid Topic Test Revision 2023 SOLUTIONSRalph Rezin MooreNo ratings yet
- Newton's Three Laws of Motion: Lesson OutlineDocument10 pagesNewton's Three Laws of Motion: Lesson OutlineGlenn ClementeNo ratings yet
- C1 - 4 Newton Laws and FrictionDocument38 pagesC1 - 4 Newton Laws and FrictionLionel MessiNo ratings yet
- Physics Scheme Class: Ss2Document6 pagesPhysics Scheme Class: Ss2Michael WestNo ratings yet
- Fluid Mechanics Cengel (Solutions Manual) Chap06-001Document27 pagesFluid Mechanics Cengel (Solutions Manual) Chap06-001NURUL SYUHADA BT ISMAIL HAJAR100% (6)
- Galilean and Aristotelian MotionDocument2 pagesGalilean and Aristotelian MotionAliah Colleen V. AgnesNo ratings yet
- Name: - Class: - DateDocument4 pagesName: - Class: - DateFrancis Ho HoNo ratings yet
- Lesson Plan - 1st Law of MotionDocument5 pagesLesson Plan - 1st Law of MotionKeziah ValenzuelaNo ratings yet
- Laws of MotionDocument3 pagesLaws of Motionryan valerioNo ratings yet
- rr100105 Applied MechanicsDocument1 pagerr100105 Applied MechanicssivabharathamurthyNo ratings yet
- BK 2 CH 6 Projectile MotionDocument11 pagesBK 2 CH 6 Projectile MotiondariuslytNo ratings yet
- Lesson Plan - Carrom BoardDocument20 pagesLesson Plan - Carrom BoardPrashant SakharkarNo ratings yet
- Module 1 Notes: 1.1 - Introduction To Medical Physics (Not Assessed)Document33 pagesModule 1 Notes: 1.1 - Introduction To Medical Physics (Not Assessed)Zahraa Al-SayedNo ratings yet
- FBDDocument10 pagesFBDVijay GorfadNo ratings yet