You might also like
- Okuma OSP 5 Axis TrainingDocument49 pagesOkuma OSP 5 Axis TrainingRick WilliamsNo ratings yet
- MasterCAM 5 Ax TrainingDocument189 pagesMasterCAM 5 Ax TrainingTruonglana100% (2)
- AppGuide - EnhancedTT MasterCam 2017Document17 pagesAppGuide - EnhancedTT MasterCam 2017eltklasNo ratings yet
- Mastercam X7 NCI Parameter RefDocument465 pagesMastercam X7 NCI Parameter Refmarkoskitp75% (8)
- Easy Probing RenishawDocument29 pagesEasy Probing RenishawNicolae TabircaNo ratings yet
- Mastercam 2017 NCI Reference GuideDocument146 pagesMastercam 2017 NCI Reference GuideeltklasNo ratings yet
- Intro To The MP Post GuideDocument14 pagesIntro To The MP Post GuideanilkpNo ratings yet
- EdgeCAM Advanced MillingDocument111 pagesEdgeCAM Advanced MillingRodrigo Luiz100% (1)
- 102 Intro To MP Post Proc PDFDocument26 pages102 Intro To MP Post Proc PDFKen LeeNo ratings yet
- 107 PostblocksDocument28 pages107 Postblocksxuanphuong2710100% (1)
- Mastercam - Post-Processor Tutorial 1Document40 pagesMastercam - Post-Processor Tutorial 1Edson Sawada100% (1)
- SAMPLE Mastercam X9 Multiaxis Professional CoursewareDocument33 pagesSAMPLE Mastercam X9 Multiaxis Professional CoursewareEduardo Aleman Reyna100% (1)
- VERICUT Training SessionsDocument462 pagesVERICUT Training Sessionsdiaboloboy100% (3)
- FANUC Macro Program ProgrammingDocument16 pagesFANUC Macro Program ProgrammingVinsensius Herdani Agung Nugroho50% (4)
- McamX3 Post Parameter RefDocument416 pagesMcamX3 Post Parameter Refabsalon_jarvNo ratings yet
- Mastercam To Mazatrol Post-Processor TutorialDocument78 pagesMastercam To Mazatrol Post-Processor TutorialbadnovaNo ratings yet
- Doosan Puma MX Series PDFDocument68 pagesDoosan Puma MX Series PDFGuillermo RamirezNo ratings yet
- Vericut Help PDFDocument2,147 pagesVericut Help PDFNam Lê67% (3)
- Heidenhain Touch ProbeDocument72 pagesHeidenhain Touch ProbeHoho Hahov100% (1)
- Multi Axis Machining ReportDocument24 pagesMulti Axis Machining ReportFerney AlexisNo ratings yet
- MPBinX Guide Reference Mastercam 2017Document12 pagesMPBinX Guide Reference Mastercam 2017eltklas100% (1)
- Makino Basic ProgrammingDocument104 pagesMakino Basic ProgrammingAPSARAUSA100% (8)
- Mastercam X Building PostsDocument29 pagesMastercam X Building Postsmrbwsmithjr100% (4)
- Mastercam2020 MultiaxisAdvanced TrainingTutorial SAMPLEDocument43 pagesMastercam2020 MultiaxisAdvanced TrainingTutorial SAMPLENguyen Van LyNo ratings yet
- MP Online Reference 2018Document1,935 pagesMP Online Reference 2018HungTranNo ratings yet
- 5 Axis Lesson 2 SampleDocument20 pages5 Axis Lesson 2 SampledizorientedNo ratings yet
- Vericut HelpDocument1,085 pagesVericut Helpiresa_nuratNo ratings yet
- Doosan Puma-ADVANCED 30 Series TC PROGRAMMING Rev4 With 31i AddendumDocument114 pagesDoosan Puma-ADVANCED 30 Series TC PROGRAMMING Rev4 With 31i AddendumCasey GroomsNo ratings yet
- Multi Axis Lesson 7Document34 pagesMulti Axis Lesson 7Truonglana100% (1)
- NTX 10006600 Post Manual 20120601Document197 pagesNTX 10006600 Post Manual 20120601Cristian VegaNo ratings yet
- MAZAK Matrix2 EIA ProgManualDocument502 pagesMAZAK Matrix2 EIA ProgManuallastowl50% (2)
- Sequence of Programming Steps For PartMaker SwissCAMDocument1 pageSequence of Programming Steps For PartMaker SwissCAMshawntsungNo ratings yet
- Mastercam C-Axis Tutorial6Document55 pagesMastercam C-Axis Tutorial6xuanphuong27100% (1)
- Mastercam 2017 Lathe CY Axis Toolpaths Tutorial SAMPLEDocument32 pagesMastercam 2017 Lathe CY Axis Toolpaths Tutorial SAMPLEsekhon8751150% (1)
- Macro Training BookDocument26 pagesMacro Training BookCasey Grooms100% (1)
- 3 Axis Surface MachiningDocument512 pages3 Axis Surface MachiningagrbovicNo ratings yet
- Servoworks CNC Macro Programming Manual: Revision 1.94 © 2011 Soft Servo Systems, IncDocument80 pagesServoworks CNC Macro Programming Manual: Revision 1.94 © 2011 Soft Servo Systems, IncLe Hoang HiepNo ratings yet
- 103 Changes To The MP PostDocument12 pages103 Changes To The MP Postxuanphuong2710No ratings yet
- Mastercam PostDocument8 pagesMastercam PostwcwtnuiNo ratings yet
- MAKINO PRO3 ProgManual PDFDocument224 pagesMAKINO PRO3 ProgManual PDFyraju88100% (1)
- Sample - Mastercam X5 Advanced Multiaxis Training TutorialDocument65 pagesSample - Mastercam X5 Advanced Multiaxis Training Tutorialtuanvn76100% (6)
- Haas VF Series - ESPRIT-Programming Manual - V3.208 PDFDocument21 pagesHaas VF Series - ESPRIT-Programming Manual - V3.208 PDFPreda BogdanNo ratings yet
- Fanuc Ot CNC Program Manual Gcodetraining 588Document104 pagesFanuc Ot CNC Program Manual Gcodetraining 588hiepkhachbk2010824350% (2)
- 5轴资料Document136 pages5轴资料jiabang liuNo ratings yet
- VMX 42 SR Engineering Document NC Post Processor GuideDocument18 pagesVMX 42 SR Engineering Document NC Post Processor GuideWietse van der SteenNo ratings yet
- Lesson Ten TextDocument9 pagesLesson Ten TextVignesh WaranNo ratings yet
- PB Kinematics Advanced NX8Document31 pagesPB Kinematics Advanced NX8Dolvando Ferreira Alves FilhoNo ratings yet
- Axis Pairing OverviewDocument8 pagesAxis Pairing OverviewSeintec CncNo ratings yet
- Codigos MOMDocument138 pagesCodigos MOMlucho0314No ratings yet
- What Is 5 Axis CNC MachiningDocument10 pagesWhat Is 5 Axis CNC MachiningSuhail Abrol100% (1)
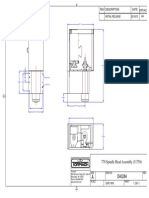
- Rev Description Initials Date: 770 Spindle Head Assembly (31758)Document1 pageRev Description Initials Date: 770 Spindle Head Assembly (31758)widyaNo ratings yet
- Whats New in Rhino Cam 2015Document6 pagesWhats New in Rhino Cam 2015widyaNo ratings yet
- Development of A Postprocessor For A Multi-Axis CNC Milling CenteDocument57 pagesDevelopment of A Postprocessor For A Multi-Axis CNC Milling CentewidyaNo ratings yet
- 5AXISMAKER Gcode Generator Manual V0.1 2Document17 pages5AXISMAKER Gcode Generator Manual V0.1 2widyaNo ratings yet
- About Topsøe - and What We DoDocument20 pagesAbout Topsøe - and What We DoAbhishek ChaudharyNo ratings yet
- Nelson Sanchez GE Module October 2020Document92 pagesNelson Sanchez GE Module October 2020Nneg Gray0% (1)
- Hematology NotesDocument3 pagesHematology NotesFarisa Jane BanggoNo ratings yet
- Applied Physics Mini Launcher Lab ReportDocument12 pagesApplied Physics Mini Launcher Lab ReportTalharashid RamzanNo ratings yet
- What Are Your Observations or Generalizations On How Text/ and or Images Are Presented?Document2 pagesWhat Are Your Observations or Generalizations On How Text/ and or Images Are Presented?Darlene PanisaNo ratings yet
- DownloadDocument11 pagesDownloadAnonymous ffje1rpaNo ratings yet
- Case Study On Maruti 800Document4 pagesCase Study On Maruti 800Nizar MesaniNo ratings yet
- Description MicroscopeDocument4 pagesDescription MicroscopeRanma SaotomeNo ratings yet
- ES1 Work Panel DatasheetDocument3 pagesES1 Work Panel DatasheetGerardo Alberto Navarro LopezNo ratings yet
- Inclusive E-Service or Risk of Digital Divide The Case of National ICT Policy 2018 of BangladeshDocument11 pagesInclusive E-Service or Risk of Digital Divide The Case of National ICT Policy 2018 of BangladeshInternational Journal of Innovative Science and Research Technology100% (1)
- Ips 350:400:450:500:600 07:05 PDFDocument124 pagesIps 350:400:450:500:600 07:05 PDFRandall PettersonNo ratings yet
- SID-2AF User Manual English V3.04Document39 pagesSID-2AF User Manual English V3.04om_zahidNo ratings yet
- 1F4 Catalog0808Document12 pages1F4 Catalog0808Edwin Ng0% (1)
- Bhajan Songs PDFDocument36 pagesBhajan Songs PDFsilphansi67% (6)
- Cat IQ TestDocument3 pagesCat IQ TestBrendan Bowen100% (1)
- SBFP Timeline 2019Document1 pageSBFP Timeline 2019Marlon Berjolano Ere-erNo ratings yet
- Roxas Avenue, Isabela City, Basilan Province AY: 2018-2019: Claret College of IsabelaDocument2 pagesRoxas Avenue, Isabela City, Basilan Province AY: 2018-2019: Claret College of IsabelaJennilyn omnosNo ratings yet
- BS EN 1677-5-2001 - Inc.Document3 pagesBS EN 1677-5-2001 - Inc.Ameer Sadimin SGNo ratings yet
- Larong Lahi Week 15 18Document7 pagesLarong Lahi Week 15 18CJAY SOTELONo ratings yet
- MATH6113 - PPT5 - W5 - R0 - Applications of IntegralsDocument58 pagesMATH6113 - PPT5 - W5 - R0 - Applications of IntegralsYudho KusumoNo ratings yet
- Brochure HorticultureDocument46 pagesBrochure HorticulturezulfiqaralimalikNo ratings yet
- STR File Varun 3Document61 pagesSTR File Varun 3Varun mendirattaNo ratings yet
- Philippine Politics and Constitution SyllabusDocument7 pagesPhilippine Politics and Constitution SyllabusIvy Karen C. Prado100% (1)
- 3 - 6consctructing Probability Distributions CG A - 4 - 6 Lesson 2Document24 pages3 - 6consctructing Probability Distributions CG A - 4 - 6 Lesson 2CHARLYN JOY SUMALINOGNo ratings yet
- 26 05 29 Hangers and Supports For Electrical SystemsDocument8 pages26 05 29 Hangers and Supports For Electrical SystemskaichosanNo ratings yet
- How To Use Hyper-V Snapshot Revert, Apply, and Delete OptionsDocument15 pagesHow To Use Hyper-V Snapshot Revert, Apply, and Delete OptionsKaran MishraNo ratings yet
- Cognitive Clusters in SpecificDocument11 pagesCognitive Clusters in SpecificKarel GuevaraNo ratings yet
- Informed Consent: Ghaiath M. A. HusseinDocument26 pagesInformed Consent: Ghaiath M. A. HusseinDocAxi Maximo Jr AxibalNo ratings yet
- PEB Requirment by ClientDocument4 pagesPEB Requirment by ClientViraj ModiNo ratings yet
- HIS 101 Home Work 2Document10 pagesHIS 101 Home Work 2Nabil HussainNo ratings yet