You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mars Climate Orbiter ReportDocument27 pagesMars Climate Orbiter Reportbiguelo100% (1)
- (ANSI - AWS A5.31-92R) AWS A5 Committee On Filler Metal-SpecificationDocument18 pages(ANSI - AWS A5.31-92R) AWS A5 Committee On Filler Metal-SpecificationSivaram KottaliNo ratings yet
- C PM 71.v2016-12-11 PDFDocument31 pagesC PM 71.v2016-12-11 PDFbobi2201No ratings yet
- Features and ApplicationsDocument36 pagesFeatures and ApplicationsFWEFWEFWNo ratings yet
- Title DefenseDocument3 pagesTitle DefenseLiezl Sabado100% (1)
- Reports On TECHNICAL ASSISTANCE PROVIDED by The Teachers To The Learners / Learning FacilitatorsDocument2 pagesReports On TECHNICAL ASSISTANCE PROVIDED by The Teachers To The Learners / Learning FacilitatorsJerv AlferezNo ratings yet
- VisualizationDocument4 pagesVisualizationspanglemaker3719349No ratings yet
- Spectatorship Affect and Liveness in Contemporary British Performance PDFDocument358 pagesSpectatorship Affect and Liveness in Contemporary British Performance PDFShivansh Tuli100% (1)
- Tecnicas Monitoreo CorrosionDocument8 pagesTecnicas Monitoreo CorrosionJavier GonzalezNo ratings yet
- TOS 5 Unit 2b Design of Continuous One Way SlabDocument9 pagesTOS 5 Unit 2b Design of Continuous One Way SlabKshitija100% (1)
- Matrix Analysis of Networks: J. R. LucasDocument63 pagesMatrix Analysis of Networks: J. R. LucasNethmini SamarawickramaNo ratings yet
- 01 Agile Challenge-Does Anyone Have A PencilDocument13 pages01 Agile Challenge-Does Anyone Have A PencilAbhisek MukherjeeNo ratings yet
- Legend 1028KDocument2 pagesLegend 1028KAndres Fdo Mora DNo ratings yet
- What Is A RubricDocument2 pagesWhat Is A Rubricjasmina2869No ratings yet
- Tcexam Result 3174 419 20111208Document8 pagesTcexam Result 3174 419 20111208goldenkumarNo ratings yet
- AVT 2217 Module 5 Aiport Lighting SystemDocument15 pagesAVT 2217 Module 5 Aiport Lighting SystemJane PazNo ratings yet
- X20PS9600-en V1.20Document10 pagesX20PS9600-en V1.20PREVENCIONISTA HUAQUIANNo ratings yet
- Toro 006Document2 pagesToro 006Eric CNo ratings yet
- Appendix in Research PaperDocument6 pagesAppendix in Research Papergvzfmq91100% (1)
- NCLFNP - Mr. Robert McClelland CaseDocument4 pagesNCLFNP - Mr. Robert McClelland CaseAiresh Lamao50% (2)
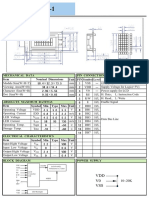
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDocument1 pageV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNo ratings yet
- Sharding:: Vertical Scaling Involves Increasing The Capacity of A Single Server, Such As Using A More Powerful CPUDocument233 pagesSharding:: Vertical Scaling Involves Increasing The Capacity of A Single Server, Such As Using A More Powerful CPUJigar SutariyaNo ratings yet
- Project 8 - Part 1 - ResumeDocument2 pagesProject 8 - Part 1 - Resumeapi-275234784No ratings yet
- Principles of MicroeconomicsDocument41 pagesPrinciples of MicroeconomicsHoàng LýNo ratings yet
- Pure Theory of Law Hans Kelson-Ltp..Document45 pagesPure Theory of Law Hans Kelson-Ltp..ShabnamNo ratings yet
- C TADM70 73 Sample QuestionsDocument2 pagesC TADM70 73 Sample QuestionsPriya ChNo ratings yet
- 40rua 40rusDocument68 pages40rua 40rusfua2011live.comNo ratings yet
- Original Instructions Alkuperäiset Ohjeet Αρχικýj Οδηγßεj: Rev. 4 5/31/11 BrwDocument32 pagesOriginal Instructions Alkuperäiset Ohjeet Αρχικýj Οδηγßεj: Rev. 4 5/31/11 BrwnikosvitalNo ratings yet
- What Is Situational Coaching and When To Use ItDocument3 pagesWhat Is Situational Coaching and When To Use ItBrian KamoedNo ratings yet
- Jurnal: Ekonomi PembangunanDocument14 pagesJurnal: Ekonomi PembangunanAgus MelasNo ratings yet