You might also like
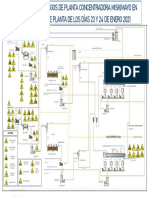
- Mapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Document1 pageMapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Kenny Jiménez RuizNo ratings yet
- Flujo de Proceso de Secado y Puerto-2015Document2 pagesFlujo de Proceso de Secado y Puerto-2015Kenny Jiménez RuizNo ratings yet
- Mapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Document1 pageMapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Kenny Jiménez RuizNo ratings yet
- 26.09.19 Observaciones Planeadas de Trabajo (Opt)Document1 page26.09.19 Observaciones Planeadas de Trabajo (Opt)Kenny Jiménez RuizNo ratings yet
- FMD Brochure 2018Document12 pagesFMD Brochure 2018Kenny Jiménez RuizNo ratings yet
- Sílabo Simulación y Juegos 2017-IIDocument8 pagesSílabo Simulación y Juegos 2017-IIKenny Jiménez RuizNo ratings yet
- PLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Document26 pagesPLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Kenny Jiménez RuizNo ratings yet
- Informe Topografía Alex AguirreDocument21 pagesInforme Topografía Alex AguirreKenny Jiménez RuizNo ratings yet
- Tareo 31.08.2019Document411 pagesTareo 31.08.2019Kenny Jiménez RuizNo ratings yet
- Copia de 4 - Formato para Ingreso-Salida de PertenenciasDocument2 pagesCopia de 4 - Formato para Ingreso-Salida de PertenenciasKenny Jiménez RuizNo ratings yet
- Documento Alcance Muestreo Relaves Rev 1Document7 pagesDocumento Alcance Muestreo Relaves Rev 1Kenny Jiménez RuizNo ratings yet
- Tareos 14.07.19Document712 pagesTareos 14.07.19Kenny Jiménez RuizNo ratings yet
- Neupex PDFDocument36 pagesNeupex PDFKenny Jiménez Ruiz100% (1)
- Metrado de Barandas de TránsitoDocument3 pagesMetrado de Barandas de TránsitoKenny Jiménez RuizNo ratings yet
- Virus Hack - Sistemas de Transmisión InteligentesDocument89 pagesVirus Hack - Sistemas de Transmisión InteligentesWesly DatumNo ratings yet
- Laboratorio PLCDocument17 pagesLaboratorio PLCKenny Jiménez RuizNo ratings yet
- Aplicaciones de OpampDocument6 pagesAplicaciones de OpampKenny Jiménez RuizNo ratings yet
- Figuras PlanasDocument7 pagesFiguras Planasjuan diego donquisNo ratings yet
- 3 Eso. Movimientos en El EspacioDocument9 pages3 Eso. Movimientos en El EspacioMaite DiscorNo ratings yet
- Geometria 2 ParteDocument12 pagesGeometria 2 ParteJulian Enrique Rengifo MirandaNo ratings yet
- Semana 9. Problemas Con TrángulosDocument2 pagesSemana 9. Problemas Con Trángulosyeferson yunior xtlv cori pajuelo tu bebesito ytsNo ratings yet
- Practica de PoliedroDocument3 pagesPractica de PoliedroNieves de la CruzNo ratings yet
- Guia Semejanza y CongruenciaDocument3 pagesGuia Semejanza y CongruenciaRicardo Armando CruzNo ratings yet
- Contenido 17 La Linea y Los AngulosDocument7 pagesContenido 17 La Linea y Los AngulosRaul Barrios MNo ratings yet
- Guía 4 Matemática 8° Septiembre Teorema de PitágorasDocument6 pagesGuía 4 Matemática 8° Septiembre Teorema de PitágorasMarcia Vera VNo ratings yet
- Calcula El Perímetro y El Área de Esta FiguraDocument2 pagesCalcula El Perímetro y El Área de Esta FigurapatriciaesquivelNo ratings yet
- Matemeticas 11 - Nucleo Comun - Septiembre 2006 PDFDocument6 pagesMatemeticas 11 - Nucleo Comun - Septiembre 2006 PDFJose SalasNo ratings yet
- Geometría Análitica 71Document5 pagesGeometría Análitica 71Yhulia Racchell Del CidNo ratings yet
- Prueba 2d 3d PerimetroDocument4 pagesPrueba 2d 3d Perimetrofabyt2010100% (1)
- Cinematica de Cuerpos RigidosDocument19 pagesCinematica de Cuerpos Rigidosedgar jarquinNo ratings yet
- R TrigonometricasDocument9 pagesR TrigonometricasRasec DaliNo ratings yet
- Objetivos de Aprendizaje: Resolución de Problemas Relacionados Con Formas CónicasDocument24 pagesObjetivos de Aprendizaje: Resolución de Problemas Relacionados Con Formas CónicasLiliana LagosNo ratings yet
- Guía 5 - HomoteciaDocument9 pagesGuía 5 - HomoteciaValeria JimenezNo ratings yet
- Cuerpos GeometricosDocument8 pagesCuerpos GeometricoserwinNo ratings yet
- Elementos y Clasificación de Cuadriláteros para Tercero de Primaria PDFDocument4 pagesElementos y Clasificación de Cuadriláteros para Tercero de Primaria PDFleydi mosquera100% (3)
- 2012 - 13 DT2 - Ud 03Document12 pages2012 - 13 DT2 - Ud 03andihernanNo ratings yet
- 31 Ejercicios Poligonos y CuadrilaterosDocument9 pages31 Ejercicios Poligonos y CuadrilaterosAlex G. BuenoNo ratings yet
- Tabla Derivadas ALFA-1Document2 pagesTabla Derivadas ALFA-1fernando cespedesNo ratings yet
- Ejercicios ResueltosDocument6 pagesEjercicios ResueltosJosé Luiiz A'rNo ratings yet
- Solucionario PA1 GD 2021 IDocument17 pagesSolucionario PA1 GD 2021 IAntonyG.Moreno100% (2)
- Prueba Factorizacion Simplificacion InduccionDocument12 pagesPrueba Factorizacion Simplificacion InduccionCristopher Sanhueza A. (C.S.A)No ratings yet
- RefuerzoDocument5 pagesRefuerzoyoqueseNo ratings yet
- Matemática 4 SocDocument7 pagesMatemática 4 Socbicher.77777No ratings yet
- Guia Cuerpos Geometricos PDFDocument23 pagesGuia Cuerpos Geometricos PDFRuben Dario Gonzalez PereiraNo ratings yet
- 3 Ejercicios de Geometría Segunda Parte 19-20Document3 pages3 Ejercicios de Geometría Segunda Parte 19-20DavidNo ratings yet
- Transformaciones GeometricasDocument38 pagesTransformaciones GeometricasOwen Emmanuel Sanchez HernandezNo ratings yet