You might also like
- Marine Rudders, Hydrofoils and Control Surfaces: Principles, Data, Design and ApplicationsFrom EverandMarine Rudders, Hydrofoils and Control Surfaces: Principles, Data, Design and ApplicationsNo ratings yet
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsFrom EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsRating: 4.5 out of 5 stars4.5/5 (3)
- Structural Design of A Semi-Submersible Platform With Water-Entrapment Plates Based On A Time-Domain Hydrodynamic Algorithm Coupled With Finite-ElementsDocument8 pagesStructural Design of A Semi-Submersible Platform With Water-Entrapment Plates Based On A Time-Domain Hydrodynamic Algorithm Coupled With Finite-Elementssaeed-21No ratings yet
- Hydro Structure PapersDocument157 pagesHydro Structure PapersChen Chu-yunNo ratings yet
- Lazy AssignmentDocument5 pagesLazy Assignmentthefoot39No ratings yet
- Sesam Webinar - Complete Structural Analysis For Floating OWT - QA - tcm8-105379Document9 pagesSesam Webinar - Complete Structural Analysis For Floating OWT - QA - tcm8-105379samiransmitaNo ratings yet
- Why Good Mooring Systems Go Bad 7 16 14Document41 pagesWhy Good Mooring Systems Go Bad 7 16 14pradewoNo ratings yet
- Cable On-Bottom Stability Analysis for Zakum Oil Lines Replacement ProjectDocument12 pagesCable On-Bottom Stability Analysis for Zakum Oil Lines Replacement ProjectSourabhNo ratings yet
- Floating Foundations For Offshore Wind TurbinesDocument37 pagesFloating Foundations For Offshore Wind TurbinesRiken Mangukiya100% (1)
- OMAE2012 84121 PresentationDocument16 pagesOMAE2012 84121 PresentationsojanvasudevanNo ratings yet
- Estimation of Hull Girder Vertical Bending Moments Including Non Linear and RDocument14 pagesEstimation of Hull Girder Vertical Bending Moments Including Non Linear and RalfavectorNo ratings yet
- Orcaflex FastDocument12 pagesOrcaflex FastDavid FabuelNo ratings yet
- Accurately Predicting Hydrodynamic Loads on ROVsDocument6 pagesAccurately Predicting Hydrodynamic Loads on ROVsDavid ThomsonNo ratings yet
- (ANSYS AQWA) Study On Mooring System Design of Floating Offshore Wind Turbine in Jeju Offshore AreaDocument9 pages(ANSYS AQWA) Study On Mooring System Design of Floating Offshore Wind Turbine in Jeju Offshore AreaychodnekerNo ratings yet
- FragmDocument51 pagesFragmAnonymous Ub9nEDlNo ratings yet
- Master's Thesis on Estimating Pipeline Roll Angle Using Residual Curvature MethodDocument153 pagesMaster's Thesis on Estimating Pipeline Roll Angle Using Residual Curvature MethodPrashanth Talkad Rajagopal100% (1)
- OrcaFlex Demonstration IIT MadrasDocument11 pagesOrcaFlex Demonstration IIT MadrasvigambetkarNo ratings yet
- Nonlinear Wave Loads On Offshore StructuresDocument55 pagesNonlinear Wave Loads On Offshore Structureswendydy6No ratings yet
- Sea Keeping Analysis For Preliminary DesignDocument10 pagesSea Keeping Analysis For Preliminary DesignTullio OpattiNo ratings yet
- Vessel Motions and Mooring Line Tensions in Very Shallow WaterDocument91 pagesVessel Motions and Mooring Line Tensions in Very Shallow WaterPatrick SilvaNo ratings yet
- Bulb FlatDocument12 pagesBulb FlatMahdiNo ratings yet
- 2104-Empirical Calculation of Roll Damping For Ships PDFDocument18 pages2104-Empirical Calculation of Roll Damping For Ships PDFDennys RamirezNo ratings yet
- Ultramarine Moses CrackDocument3 pagesUltramarine Moses CrackpothirajkalyanNo ratings yet
- Floating offshore wind challengesDocument13 pagesFloating offshore wind challengesAnonymous JEe6LWPNo ratings yet
- OrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Document19 pagesOrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Abam Joshua100% (1)
- OMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFDocument10 pagesOMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFAnonymous JEe6LWPNo ratings yet
- Marine Operations - Offshore Wind 2020 - NewDocument88 pagesMarine Operations - Offshore Wind 2020 - NewManoj GuptaNo ratings yet
- LR Seasafe SoftwareDocument9 pagesLR Seasafe SoftwaredsrfgNo ratings yet
- Alaska Mooring Buoy DesignDocument54 pagesAlaska Mooring Buoy Designmyusuf_engineerNo ratings yet
- Mooring OverviewDocument36 pagesMooring OverviewRAUL GALDONo ratings yet
- FEA Buckling AnalysisDocument10 pagesFEA Buckling AnalysisalexrodriguezabcNo ratings yet
- OLF - NSA Guidelines For Safe Handling and TowingDocument22 pagesOLF - NSA Guidelines For Safe Handling and TowingTomash VerbitskyNo ratings yet
- Effect of Pretension On Moored Ship RespDocument13 pagesEffect of Pretension On Moored Ship RespIvandito HerdayandityaNo ratings yet
- SPM Operational LimitationsDocument5 pagesSPM Operational LimitationshabibmusthafaNo ratings yet
- State-Of-The-Art in Design Tools For Floating Offshore Wind Tur-BinesDocument30 pagesState-Of-The-Art in Design Tools For Floating Offshore Wind Tur-BinesKiran Raju AlluriNo ratings yet
- B23-14 - TERMPOL Surveys and Studies - Section 3.14 - Single Point Mooring Provisions and Procedures A1Z6J8Document17 pagesB23-14 - TERMPOL Surveys and Studies - Section 3.14 - Single Point Mooring Provisions and Procedures A1Z6J8HASHMI MAHMOODNo ratings yet
- Generating Spectral RAOsDocument4 pagesGenerating Spectral RAOsSalvatore MonacoNo ratings yet
- 01 EDP InovaoDocument31 pages01 EDP InovaoSara Brito100% (1)
- Lillgrund Offshore Wind Farm OptimizationDocument11 pagesLillgrund Offshore Wind Farm OptimizationyousreoNo ratings yet
- FEA Global Model PDFDocument9 pagesFEA Global Model PDFAbuBakarSiddkeRumiNo ratings yet
- Oo-06 Arr't of Anchor HandlingDocument8 pagesOo-06 Arr't of Anchor HandlingCelal BozdoganNo ratings yet
- Anchor ManualDocument168 pagesAnchor ManualSeptiyan Adi NugrohoNo ratings yet
- Hydrodynamic Analysis On Gumusut Kakap PlatformDocument55 pagesHydrodynamic Analysis On Gumusut Kakap PlatformMinTzHo100% (1)
- TN-1628 Wind Induced Steady Loads On ShipsDocument61 pagesTN-1628 Wind Induced Steady Loads On ShipsmadoonanNo ratings yet
- Rationally-Based Fatigue Design of Tankers (Owen Hughes and Paul FranklinDocument17 pagesRationally-Based Fatigue Design of Tankers (Owen Hughes and Paul FranklinKelvin XuNo ratings yet
- Practical Design of Control SurfaceDocument40 pagesPractical Design of Control SurfaceRyder SahithNo ratings yet
- ULSTEIN General SeaEnergy Inputs PDFDocument22 pagesULSTEIN General SeaEnergy Inputs PDFSyaiful Anam100% (1)
- Moses IntroductionDocument170 pagesMoses IntroductionRahim KhanNo ratings yet
- IGSDC-2014 FoundationsforOffshoreDocument34 pagesIGSDC-2014 FoundationsforOffshoreanilsmg09100% (1)
- Aker Yards Offshore and Specialized VesselsDocument28 pagesAker Yards Offshore and Specialized VesselsJames HaleyNo ratings yet
- I 11 292Document9 pagesI 11 292Rasheed YusufNo ratings yet
- OPB Mooring ChainsDocument33 pagesOPB Mooring ChainsMarios DiasNo ratings yet
- High Speed Craft: Lex Keuning and Do LigtelijnDocument12 pagesHigh Speed Craft: Lex Keuning and Do LigtelijnEmreNo ratings yet
- Brief Presentation of Ut-Design UT 739 L: Multifunctional, Deep Water Anchor Handling, Tug, Supply and Service VesselDocument32 pagesBrief Presentation of Ut-Design UT 739 L: Multifunctional, Deep Water Anchor Handling, Tug, Supply and Service VesselCinthia Lidia Hidrogo PaulinoNo ratings yet
- Fatigue and Fracture of Ship StructuresDocument12 pagesFatigue and Fracture of Ship StructuresRobin GuNo ratings yet
- Windfloat: A Floating Foundation For Offshore Wind Turbines: Articles You May Be Interested inDocument35 pagesWindfloat: A Floating Foundation For Offshore Wind Turbines: Articles You May Be Interested injeremytoh89No ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Waves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971From EverandWaves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971R. E. MeyerNo ratings yet
- Numerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsFrom EverandNumerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsNo ratings yet
- SMCDraw Help enDocument67 pagesSMCDraw Help enmilo129No ratings yet
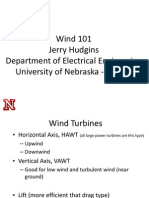
- Jerry Hud Gins BasDocument32 pagesJerry Hud Gins Basmilo129No ratings yet
- Structural Flexibility and MountsDocument28 pagesStructural Flexibility and Mountsmilo129No ratings yet
- AS5048 DatasheetDocument40 pagesAS5048 Datasheetmilo129No ratings yet
- Abrego2 AHS02Document6 pagesAbrego2 AHS02milo129No ratings yet
- PoundsDocument8 pagesPoundsmilo129No ratings yet
- Luminosity: by Burgess 1Document22 pagesLuminosity: by Burgess 1Fuscescens ChrysaoraNo ratings yet
- STCW A II2 Question BookDocument173 pagesSTCW A II2 Question BookAbdel Nasser Al-sheikh YousefNo ratings yet
- Calcule preliminare pentru determinarea posibilităților de dezeșuare a naveiDocument33 pagesCalcule preliminare pentru determinarea posibilităților de dezeșuare a naveidumitru68No ratings yet
- Bottom Survey Saat DookingDocument2 pagesBottom Survey Saat DookingDarman PutraNo ratings yet
- Curriculum Vitae MAJESTICDocument1 pageCurriculum Vitae MAJESTICSoekhaidir SuripnoNo ratings yet
- Enhancing Tug SafetyDocument21 pagesEnhancing Tug SafetyAnonymous TH0w4k0xRONo ratings yet
- In WaterDocument35 pagesIn WaterKurupath SidharthanNo ratings yet
- Ship Construction Ship DimensionsDocument26 pagesShip Construction Ship DimensionsDheerajKaushal100% (7)
- Barge Loading Schedule-20Document2 pagesBarge Loading Schedule-20Reinel MangangaweNo ratings yet
- Hydromech 2019 - Kongsberg - Prod - Catalogue PDFDocument178 pagesHydromech 2019 - Kongsberg - Prod - Catalogue PDFiwNo ratings yet
- Presentation Part 1Document142 pagesPresentation Part 1Daniel InemughaNo ratings yet
- JCI en v2 PDFDocument85 pagesJCI en v2 PDFtpriouretNo ratings yet
- Piracy and Prevention Special EditionDocument6 pagesPiracy and Prevention Special Editionkahl983No ratings yet
- STG - Jascon 25 - Vessel - Leaflet - 4pag PDFDocument4 pagesSTG - Jascon 25 - Vessel - Leaflet - 4pag PDFVovchenko AlexandrNo ratings yet
- DNVGL CG 0285Document130 pagesDNVGL CG 0285Vincent KohNo ratings yet
- Turning VesselDocument5 pagesTurning VesselPraveen KumarNo ratings yet
- Crisis Management HandoutDocument56 pagesCrisis Management HandoutdraNo ratings yet
- COLREGDocument8 pagesCOLREGManuel Villarroel GarciaNo ratings yet
- Swiber vessel fleet dimensions and specificationsDocument2 pagesSwiber vessel fleet dimensions and specificationsramyaNo ratings yet
- Lecture 3 - Ship OperationsDocument32 pagesLecture 3 - Ship Operationsshuting2teoh92% (13)
- VO-40.00 (Cargo Documents DIspatch)Document1 pageVO-40.00 (Cargo Documents DIspatch)Pavel ViktorNo ratings yet
- Product Sheet Asd Tug 3212Document2 pagesProduct Sheet Asd Tug 3212Tiago TeixeiraNo ratings yet
- Port State Control Results for Australia in 2019Document61 pagesPort State Control Results for Australia in 2019yagyabajpaiNo ratings yet
- CHI Ship NamesDocument3 pagesCHI Ship Namesichigo_bleach00No ratings yet
- Summary of Stability Formulae : Appendix IDocument12 pagesSummary of Stability Formulae : Appendix Ihoaithu883100% (5)
- Loading and Unloading DocumentsDocument3 pagesLoading and Unloading DocumentsMas AlNo ratings yet
- U.S. Navy Office of Naval Intelligence Worldwide Threat To Shipping (WTS) Report, 24 August - 21 September 2022Document7 pagesU.S. Navy Office of Naval Intelligence Worldwide Threat To Shipping (WTS) Report, 24 August - 21 September 2022lawofseaNo ratings yet
- Soal Bhs Inggris Maritim Kelas 10Document3 pagesSoal Bhs Inggris Maritim Kelas 10elyasNo ratings yet
- njp.32101058626480 6 1606546061Document1 pagenjp.32101058626480 6 1606546061王大明No ratings yet
- 7thsea GM Story Chart ESDocument1 page7thsea GM Story Chart ESwellingtonNo ratings yet