You might also like
- Project Report Control (DC Motor Module DCM150f) KP KDDocument5 pagesProject Report Control (DC Motor Module DCM150f) KP KD黒い からすNo ratings yet
- Stamford AvK Product Selection and Pricing 2018 WebDocument68 pagesStamford AvK Product Selection and Pricing 2018 WebZakir MunirNo ratings yet
- Instrument TransformersDocument47 pagesInstrument TransformersabwarisNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- Three Phase InverterDocument5 pagesThree Phase Inverternizom90No ratings yet
- MP Electrical Drives Lab ManualDocument37 pagesMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- Experiment No 8Document7 pagesExperiment No 8Manikandan P Engineering EEENo ratings yet
- Electrical Machine Drives LabDocument8 pagesElectrical Machine Drives Labblessedgeraldie78No ratings yet
- Design AM Transceiver and Measure RegulationDocument66 pagesDesign AM Transceiver and Measure RegulationjebadanielNo ratings yet
- Commissioning of DAVRDocument70 pagesCommissioning of DAVRPMG Bhuswal Project100% (1)
- Exp 11 Single Phase Inverter Part IDocument7 pagesExp 11 Single Phase Inverter Part Iusmpowerlab0% (1)
- Single Phase Induction Motor Speed ControlDocument35 pagesSingle Phase Induction Motor Speed ControlHarshit Sengar100% (2)
- Buck Boost Ec2404Document65 pagesBuck Boost Ec2404Sai ChandhraNo ratings yet
- Ec 2404 - Electronic System Design LabDocument66 pagesEc 2404 - Electronic System Design Labsujithaa13No ratings yet
- Speed Control of Three Phase Induction MotorDocument48 pagesSpeed Control of Three Phase Induction MotorChancy Dash100% (3)
- ECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationDocument6 pagesECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationAnimesh GhoshNo ratings yet
- lab13Document9 pageslab13Lûtwàmä JôëNo ratings yet
- Engineering Document: 757-4002-097 CAD #D8478Document29 pagesEngineering Document: 757-4002-097 CAD #D8478Vasi ValiNo ratings yet
- Simulation of 3 Phase Inverter and AC-DC ConverterDocument11 pagesSimulation of 3 Phase Inverter and AC-DC ConverterSoumiya SrinivasanNo ratings yet
- DC Shunt Motor Speed Control by Field & Armature MethodsDocument4 pagesDC Shunt Motor Speed Control by Field & Armature MethodsVaibhavNo ratings yet
- Pre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationDocument11 pagesPre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationtrebeardNo ratings yet
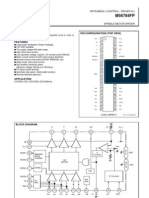
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- TECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor ConnectionDocument9 pagesTECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor Connectionتكنو ليفتNo ratings yet
- Controlling 3-Phase AC Induction Motors Using PIC18F4431Document24 pagesControlling 3-Phase AC Induction Motors Using PIC18F4431sanct1No ratings yet
- DC Motor Speed Measurement Using SensorsDocument7 pagesDC Motor Speed Measurement Using SensorsKewal Dharamshi100% (1)
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Inverters and Applications - Requirements of The Final ReportDocument27 pagesInverters and Applications - Requirements of The Final ReportHiếu TrầnNo ratings yet
- Tip23 e PDFDocument4 pagesTip23 e PDFThanh BaronNo ratings yet
- Experiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkDocument2 pagesExperiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- DC MOTOR TESTDocument83 pagesDC MOTOR TESTvatsalshah24No ratings yet
- Embedded Four Switch Three Phase Inverter Fed Induction Motor DriveDocument6 pagesEmbedded Four Switch Three Phase Inverter Fed Induction Motor DriveTJPRC PublicationsNo ratings yet
- MILL MOTOR INCHING DRIVE USING A THREE PULSE CYCLOCONVERTERDocument6 pagesMILL MOTOR INCHING DRIVE USING A THREE PULSE CYCLOCONVERTERSridhar MakkapatiNo ratings yet
- MEEN 433/667 Mechatronics Laboratory #9 PWM and Interface With ActuatorsDocument3 pagesMEEN 433/667 Mechatronics Laboratory #9 PWM and Interface With ActuatorsHarshal SpNo ratings yet
- RFQ No. ASPA17.030 Supply & Delivery of VFDs For The Tafuna WWTP-Attachment B - VFD SpecificationDocument6 pagesRFQ No. ASPA17.030 Supply & Delivery of VFDs For The Tafuna WWTP-Attachment B - VFD SpecificationPRABHU SHANKAR MNo ratings yet
- 1.1 Objective:: MBICTDocument47 pages1.1 Objective:: MBICTsagarparikh31yahoo_cNo ratings yet
- Datasheet PJ494Document11 pagesDatasheet PJ494Achmad Rifdatul HisanNo ratings yet
- Voltage Regulation of alternator-EMF, MMF - ZPF-Expt-7Document7 pagesVoltage Regulation of alternator-EMF, MMF - ZPF-Expt-7Gingka HaganeNo ratings yet
- (Rev) Lab Activity 3Document6 pages(Rev) Lab Activity 3MitzOsorioNo ratings yet
- 3ph Ac Motor ControlerDocument11 pages3ph Ac Motor Controleradamkam1111No ratings yet
- Short Shunt (2007)Document7 pagesShort Shunt (2007)Jeffrey NambatacNo ratings yet
- Amfandmains Parallel Controller Deepseaelectronics: DescriptionDocument2 pagesAmfandmains Parallel Controller Deepseaelectronics: DescriptionSandro MunizNo ratings yet
- Tda1085c DDocument12 pagesTda1085c DpamururamuNo ratings yet
- Advanced Three Phase PWM Inverter Control Using MicrocontrollerDocument8 pagesAdvanced Three Phase PWM Inverter Control Using MicrocontrollerAbdur Rehman TayyabNo ratings yet
- Variable Frequency Drive CircuitDocument4 pagesVariable Frequency Drive CircuitDiego AragónNo ratings yet
- Performance Evaluation of A Newly Constructed Three Phase Flexible Inverter For Speed Control of A Brushless DC MotorDocument11 pagesPerformance Evaluation of A Newly Constructed Three Phase Flexible Inverter For Speed Control of A Brushless DC MotorAJER JOURNALNo ratings yet
- 05 - Electro - Hydraulic ControllerDocument7 pages05 - Electro - Hydraulic Controllerwildhoney1979No ratings yet
- U 211 B 2Document21 pagesU 211 B 2tavobeckerNo ratings yet
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- Ec 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsDocument68 pagesEc 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsArchit SrivastavaNo ratings yet
- Closed Loop Speed Control of PMDC MotorDocument6 pagesClosed Loop Speed Control of PMDC MotorVignesh WaranNo ratings yet
- HY-TB3DV-N 3 Axis Driver Board Manual PDFDocument12 pagesHY-TB3DV-N 3 Axis Driver Board Manual PDFjoelgcrNo ratings yet
- Open Loop Speed Regulation of a Three Phase Induction MotorDocument4 pagesOpen Loop Speed Regulation of a Three Phase Induction MotorTimoNo ratings yet
- Control System Lab Manual (EE-324-FDocument52 pagesControl System Lab Manual (EE-324-FMohammad Umar RehmanNo ratings yet
- Synchronous Machine TestsDocument10 pagesSynchronous Machine TestsItalo ChiarellaNo ratings yet
- Specifications of Avr - SMR (Mosfet)Document4 pagesSpecifications of Avr - SMR (Mosfet)Александр ЩеблыкинNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- CPWD DGSetsFinal2013Document0 pagesCPWD DGSetsFinal2013vinaygvmNo ratings yet
- LED ComplaintsDocument2 pagesLED Complaintsaman srivastavaNo ratings yet
- Indian Income Tax Return Acknowledgement: Do Not Send This Acknowledgement To CPC, BengaluruDocument1 pageIndian Income Tax Return Acknowledgement: Do Not Send This Acknowledgement To CPC, Bengaluruaman srivastavaNo ratings yet
- Resume for Tison ThomasDocument2 pagesResume for Tison Thomasaman srivastavaNo ratings yet
- Circuit BDocument49 pagesCircuit Baman srivastavaNo ratings yet
- Kunal Jadhav C.V 3 .Document3 pagesKunal Jadhav C.V 3 .Ansaz SenNo ratings yet
- Jayant Kumar: Career ObjectiveDocument3 pagesJayant Kumar: Career Objectiveaman srivastavaNo ratings yet
- RESUME SampleDocument5 pagesRESUME Sampleaman srivastavaNo ratings yet
- MERAJUDDINDocument2 pagesMERAJUDDINaman srivastavaNo ratings yet
- BEE New GuidlinesDocument3 pagesBEE New Guidlinesaman srivastavaNo ratings yet
- GGGGDocument2 pagesGGGGaman srivastavaNo ratings yet
- Avg ModellingDocument8 pagesAvg Modellingaman srivastavaNo ratings yet
- Syllabus-Technical PositionsDocument1 pageSyllabus-Technical PositionsKoushal RathorNo ratings yet
- WP Content Uploads 2016 04 Nitification UPSC Scientist Lecturer Other PostsDocument45 pagesWP Content Uploads 2016 04 Nitification UPSC Scientist Lecturer Other Postsaman srivastavaNo ratings yet
- CBSE Class 11 Physics Notes - Projectile Motion and Circular MotionDocument16 pagesCBSE Class 11 Physics Notes - Projectile Motion and Circular Motionaman srivastavaNo ratings yet
- Wattmeter ConceptDocument12 pagesWattmeter Conceptaman srivastavaNo ratings yet
- General Awareness Magazine Vol 18 December 2015Document71 pagesGeneral Awareness Magazine Vol 18 December 2015aman srivastavaNo ratings yet
- TC9990701 Layout WD1Document1 pageTC9990701 Layout WD1aman srivastavaNo ratings yet
- Power System Nagrath Kothari SolutionsDocument88 pagesPower System Nagrath Kothari SolutionsChandra Sekhar Chebiyyam81% (16)
- Aero Coupled Euler Lagrangian Approach Abaqus ExplicitDocument14 pagesAero Coupled Euler Lagrangian Approach Abaqus Explicitaman srivastavaNo ratings yet
- DAB UnderstandingDocument8 pagesDAB Understandingaman srivastavaNo ratings yet
- State Bank of IndiaDocument1 pageState Bank of Indiaaman srivastavaNo ratings yet
- UNIT 5 Lesson 1 ElectricityDocument25 pagesUNIT 5 Lesson 1 Electricitypatrictairport9771No ratings yet
- Analysis of High Frequency Multi-Phase Multi-Stage Boost ConverterDocument7 pagesAnalysis of High Frequency Multi-Phase Multi-Stage Boost ConverterKaruna MudliyarNo ratings yet
- Single Phase Transformers Wake-Up Questions (To Be Practiced For VIVA in LAB)Document4 pagesSingle Phase Transformers Wake-Up Questions (To Be Practiced For VIVA in LAB)Shivam SinghNo ratings yet
- Jak 0cDocument4 pagesJak 0cOliver MendozaNo ratings yet
- Medium Voltage Electrical Systems For Data CentersDocument28 pagesMedium Voltage Electrical Systems For Data CentersArjun EnonosNo ratings yet
- LIPS Board Block Diagram: Primary SecondaryDocument3 pagesLIPS Board Block Diagram: Primary SecondaryListenNo ratings yet
- MCQs on Steam Turbines and Gas TurbinesDocument8 pagesMCQs on Steam Turbines and Gas TurbinesHamza TariqNo ratings yet
- Ee 307Document2 pagesEe 307Kester TeodoroNo ratings yet
- 0625 s05 QP 2Document16 pages0625 s05 QP 2Sam FordNo ratings yet
- MNS MNS: Auto Transfert Switch UnitDocument2 pagesMNS MNS: Auto Transfert Switch Unitluat1983No ratings yet
- TowerDocument71 pagesTowerS. Chakrabarty MeconNo ratings yet
- Paper 4 Marine Electrical TechnologyDocument2 pagesPaper 4 Marine Electrical TechnologysuveshNo ratings yet
- Havells IndustrialSwitchgearDocument48 pagesHavells IndustrialSwitchgearpramanNo ratings yet
- Locate Battery Ground FaultsDocument2 pagesLocate Battery Ground FaultsArra JanrafSasihNo ratings yet
- Carrier floor mounted inverter and fixed speed air conditioners performance and specsDocument2 pagesCarrier floor mounted inverter and fixed speed air conditioners performance and specsArthur DeiparineNo ratings yet
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDocument5 pagesBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNo ratings yet
- Tabla de Factores de Conversión de UnidadesDocument2 pagesTabla de Factores de Conversión de UnidadesAnonymous mJNbkg1C0No ratings yet
- Power System Operation Guide: Load Curves, Forecasting & CommitmentDocument14 pagesPower System Operation Guide: Load Curves, Forecasting & Commitmentindhu.cs75% (4)
- ĐỀ 1Document3 pagesĐỀ 1Nguyễn Tùng MinhNo ratings yet
- CPG 0Document20 pagesCPG 0muhdshafiq12No ratings yet
- Rggvy & ApdrpDocument48 pagesRggvy & ApdrpVikas RazdanNo ratings yet
- Dynamo PartsDocument25 pagesDynamo Partskathy shiNo ratings yet
- APS-6R: 6.0 Amp Auxilary Power SupplyDocument2 pagesAPS-6R: 6.0 Amp Auxilary Power SupplyDinaNo ratings yet
- Sample A3 Project - Hvac S L C A: Ystem Ifecycle OST NalysisDocument1 pageSample A3 Project - Hvac S L C A: Ystem Ifecycle OST NalysisMohamed OsmanNo ratings yet
- 762id - Development of Cluster-7 Marginal Field Paper To PetrotechDocument2 pages762id - Development of Cluster-7 Marginal Field Paper To PetrotechSATRIONo ratings yet
- ABB HVAC Webinars - Power Quality in Buildings 26082020Document31 pagesABB HVAC Webinars - Power Quality in Buildings 26082020dave chaudhuryNo ratings yet
- An Economic Dispatch Model Incorporating Wind PowerDocument9 pagesAn Economic Dispatch Model Incorporating Wind PowerBalajiNo ratings yet
- Cindy A. Batmomolin - Reflective JournalDocument3 pagesCindy A. Batmomolin - Reflective JournalChindy BatmomolinNo ratings yet