You might also like
- Sensorless SMC Controls DFIG Grid ConnectionDocument25 pagesSensorless SMC Controls DFIG Grid ConnectionJuan Diego Calsin TapiaNo ratings yet
- Sony KV-29FS120 (Chassis BA-6) PDFDocument81 pagesSony KV-29FS120 (Chassis BA-6) PDFJuan Diego Calsin TapiaNo ratings yet
- ConrolDocument15 pagesConrolJuan Diego Calsin TapiaNo ratings yet
- ControlDocument13 pagesControlJuan Diego Calsin TapiaNo ratings yet
- Various/lc Meter PanelDocument1 pageVarious/lc Meter Paneljaelani_jelNo ratings yet
- 200 Chess Problems by HealeyDocument76 pages200 Chess Problems by HealeyBercin DassNo ratings yet
- 200 Chess Problems by HealeyDocument76 pages200 Chess Problems by HealeyBercin DassNo ratings yet
- Various/lc Meter PanelDocument1 pageVarious/lc Meter Paneljaelani_jelNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- LG SKEMA 22lk310 - 22lk311Document28 pagesLG SKEMA 22lk310 - 22lk311Aditya AdityaNo ratings yet
- SL 012r Pe LV GDocument2 pagesSL 012r Pe LV GAnup KumarNo ratings yet
- Harmonic Reduction Techniques in an InverterDocument47 pagesHarmonic Reduction Techniques in an InvertertamiratNo ratings yet
- FAN7387 SMDDocument17 pagesFAN7387 SMDHung KdNo ratings yet
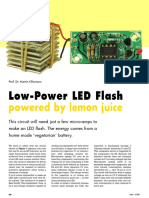
- Electronique - Low-Power Led FlashDocument2 pagesElectronique - Low-Power Led FlashkoukihamedNo ratings yet
- Vishay White Sheet For Film CapacitorsDocument8 pagesVishay White Sheet For Film CapacitorsBenjamin DoverNo ratings yet
- Color TV China TCL Chassis M113 PDFDocument9 pagesColor TV China TCL Chassis M113 PDFRiza Badua0% (1)
- Seaga Vending Machine ManualDocument42 pagesSeaga Vending Machine ManualhaizammNo ratings yet
- The Coil S Secret Keys For The OverUnity PDFDocument5 pagesThe Coil S Secret Keys For The OverUnity PDFaman100% (1)
- EE5251 Unit 1Document129 pagesEE5251 Unit 1SathyaNo ratings yet
- MCQs On Power Systems From EU Part1Document24 pagesMCQs On Power Systems From EU Part1Gilbert John OnayanNo ratings yet
- 32LH7000 - ZA CH - LD91D (SM) PDFDocument35 pages32LH7000 - ZA CH - LD91D (SM) PDFJory2005No ratings yet
- Requirements on Manufacture of Electrical EquipmentDocument40 pagesRequirements on Manufacture of Electrical EquipmentsamuelNo ratings yet
- Laplace MatlabDocument21 pagesLaplace MatlabIrwan WahyudiNo ratings yet
- E&TE - ESE - Mains - 2020 - Paper - 1 by Ace AcademyDocument65 pagesE&TE - ESE - Mains - 2020 - Paper - 1 by Ace AcademyrajaNo ratings yet
- VDF - Svx030a1-4a1b2 - UmDocument156 pagesVDF - Svx030a1-4a1b2 - UmRicardoNo ratings yet
- Shot Flow ControlDocument13 pagesShot Flow ControlRAJIV GandhiNo ratings yet
- MegoHMMETER User Manual GuideDocument32 pagesMegoHMMETER User Manual Guidelilisanica6232No ratings yet
- Automatic Night LightDocument18 pagesAutomatic Night LightSubhash Bajaj100% (3)
- SWR Meter ProjectDocument12 pagesSWR Meter ProjectfostechNo ratings yet
- Transients RestrikesDocument9 pagesTransients RestrikesjgerandNo ratings yet
- Building a reliable capacitive sensor interface with AD7142 capacitive-to-digital converterDocument2 pagesBuilding a reliable capacitive sensor interface with AD7142 capacitive-to-digital converterShri KulkarniNo ratings yet
- 1KM Power FM TransmitterDocument5 pages1KM Power FM Transmittermax_orwellNo ratings yet
- Tekna NFOGM MPFM Handbook v2 2005Document115 pagesTekna NFOGM MPFM Handbook v2 2005ltrongluanvnNo ratings yet
- Introduction To Electricity & Electrical Systems: Prelim Learning ResourcesDocument41 pagesIntroduction To Electricity & Electrical Systems: Prelim Learning ResourcesKib-anne Miguel PasikanNo ratings yet
- DLL CSS EXPLORATORY Week 8Document5 pagesDLL CSS EXPLORATORY Week 8Janessa Dawn AbayonNo ratings yet
- UAF42 Filtro NotchDocument15 pagesUAF42 Filtro NotchJuan Jose ArrietaNo ratings yet
- ECE 5664 Spring 2021 Test #1Document7 pagesECE 5664 Spring 2021 Test #1Muhammad FarooqNo ratings yet
- LM2586 - 12V To 48VDocument3 pagesLM2586 - 12V To 48VfrankvnkNo ratings yet
- Isro 2018Document71 pagesIsro 2018gnanarani nambiNo ratings yet