You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Automatic Brake Failure Indicator and Over Heating AlarmDocument11 pagesAutomatic Brake Failure Indicator and Over Heating AlarmAakash SheelvantNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Automated Rope Climbing RobotDocument10 pagesAutomated Rope Climbing RobotAakash SheelvantNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Autonomous Cleaning RobotDocument4 pagesAutonomous Cleaning RobotAakash SheelvantNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Design and Development of "Suraksha"-A Women SafetyDocument9 pagesDesign and Development of "Suraksha"-A Women SafetyAakash SheelvantNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- S124-Solar Based Mobile Charger For Rural AreasDocument4 pagesS124-Solar Based Mobile Charger For Rural AreasYellaturi Siva Kishore ReddyNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Multiuser Short Message Service Based Wireless Electronic Notice BoardDocument7 pagesMultiuser Short Message Service Based Wireless Electronic Notice BoardPavanJangidNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- ATM Security Using Fingerprint RecognitionDocument6 pagesATM Security Using Fingerprint RecognitionAakash SheelvantNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Autonomous Indoor Helicopter Flight Using A Single Onboard CameraDocument8 pagesAutonomous Indoor Helicopter Flight Using A Single Onboard CameraAakash SheelvantNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
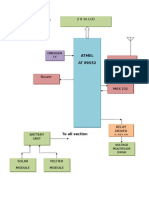
- Safety Block DiagramDocument1 pageSafety Block DiagramAakash SheelvantNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Rotary Inverted PendulumDocument2 pagesRotary Inverted PendulumDuvanJahirBetancourtNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Circular Motion MCQ PDFDocument13 pagesCircular Motion MCQ PDFGiriprasad GunalanNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Vectors and The Geometry of SpaceDocument81 pagesVectors and The Geometry of Spaceayesha noorNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- CentrifugationDocument21 pagesCentrifugationbrillyyudoNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Revised Article-NiharikaDocument8 pagesRevised Article-NiharikaNiharika AgrNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Block Diagrams: Modeling and SimulationDocument48 pagesBlock Diagrams: Modeling and SimulationAbel CabaNo ratings yet
- The Feynman Lectures On Physics Vol. II CH PDFDocument14 pagesThe Feynman Lectures On Physics Vol. II CH PDFmanoj27081982No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Simple Harmonic Motion: Section ADocument53 pagesSimple Harmonic Motion: Section AAyush SrivastavNo ratings yet
- 1 - Design and Analysis of Impeller Blade For Axial Flow PumpsDocument31 pages1 - Design and Analysis of Impeller Blade For Axial Flow PumpsmghgolNo ratings yet
- 03 Gyroscopic CoupleDocument30 pages03 Gyroscopic CoupleSagar NeupaneNo ratings yet
- Technical Report (Manual) : FANUC Series 16i/18i-MA/TA Bidirectional Pitch Error Compensation FunctionDocument12 pagesTechnical Report (Manual) : FANUC Series 16i/18i-MA/TA Bidirectional Pitch Error Compensation Functionferjani ahmedNo ratings yet
- (Template) S5-2ND-TEST SERIES-2021-22-P.EDocument13 pages(Template) S5-2ND-TEST SERIES-2021-22-P.EcrazymindNo ratings yet
- Kinematics of Machinery (EME 202) CamsDocument25 pagesKinematics of Machinery (EME 202) Camshitaishi5599No ratings yet
- CircularMotion PCDocument18 pagesCircularMotion PCAaryan KeshanNo ratings yet
- Equations of Motion For A Single Degree-Of-Freedom SystemDocument42 pagesEquations of Motion For A Single Degree-Of-Freedom SystemFernanda LagoNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Phenomena and Exploration Associated With The Solar SystemDocument25 pagesPhenomena and Exploration Associated With The Solar SystemDamithu DinlakaNo ratings yet
- Final General Awareness Capsule For SSC 2017 CGLDocument122 pagesFinal General Awareness Capsule For SSC 2017 CGLPupinder SinghNo ratings yet
- Axial FlowDocument13 pagesAxial FlowArivanandan Get GoingNo ratings yet
- Sub Code: ME8292 Sub Name: Engineering Mechanics Max - Marks:100 Duration: 3 Hrs Branch: Mechanical Engg. Year/Sem: I / II Answer All QuestionsDocument3 pagesSub Code: ME8292 Sub Name: Engineering Mechanics Max - Marks:100 Duration: 3 Hrs Branch: Mechanical Engg. Year/Sem: I / II Answer All QuestionssivashanmugamNo ratings yet
- TOMDocument21 pagesTOMHarikrishna ShenoyNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- 005 Radex-N Rigiflex-N enDocument0 pages005 Radex-N Rigiflex-N enChevronelleNo ratings yet
- Operator Manual Hartrol M7200Document73 pagesOperator Manual Hartrol M7200Leonardo Borges100% (3)
- Reaction Wheel NoiseDocument17 pagesReaction Wheel NoisePedro JuradoNo ratings yet
- MotionManager Animation SolidworksDocument38 pagesMotionManager Animation SolidworksSudeep Rkp0% (1)
- Drag of A Disk Rotating in A Viscous FluidDocument50 pagesDrag of A Disk Rotating in A Viscous FluidBaptiste RéaudNo ratings yet
- Donald A. Neumann-Kinesiology of The Musculoskeletal SystemDocument607 pagesDonald A. Neumann-Kinesiology of The Musculoskeletal SystemLuciano Klapisch81% (16)
- CN PHY Vector (L) PDFDocument39 pagesCN PHY Vector (L) PDFPaathshala Education ITNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Math Ia PDFDocument12 pagesMath Ia PDFShreyasSNo ratings yet
- Investigations On Fluid Friction of Rotational Disks With Andwithout Modified Outlet Sections in Real Centrifugal Pump CasingsDocument9 pagesInvestigations On Fluid Friction of Rotational Disks With Andwithout Modified Outlet Sections in Real Centrifugal Pump CasingsAmanda KellyNo ratings yet
- Ballistic Target Flight Trajectory Simulation (A Matlab Program)Document14 pagesBallistic Target Flight Trajectory Simulation (A Matlab Program)Marcelo MartinezNo ratings yet