You might also like
- Simulación de circuitos electrónicos con OrCAD® PSpice®From EverandSimulación de circuitos electrónicos con OrCAD® PSpice®No ratings yet
- Proyecto de Ingenieria InversaDocument15 pagesProyecto de Ingenieria InversaYuberki S. PuelloNo ratings yet
- Cálculo Integral Ejercicios Resueltos Paso A PasoDocument137 pagesCálculo Integral Ejercicios Resueltos Paso A Pasoregina_quinteros_183% (30)
- Optimización no linealDocument6 pagesOptimización no linealTiko Duran100% (2)
- Laboratorio Motores Paso A PasoDocument7 pagesLaboratorio Motores Paso A PasoSantiago CarmonaNo ratings yet
- Manual Lucas Null.Document26 pagesManual Lucas Null.Steven SpenceNo ratings yet
- Control de Motor Paso A Paso Con Pic16f84a - Electrónica & RobóticaDocument6 pagesControl de Motor Paso A Paso Con Pic16f84a - Electrónica & RobóticaSaba FernandezNo ratings yet
- Motor Paso A Paso - Wikipedia, La Enciclopedia Libre PDFDocument14 pagesMotor Paso A Paso - Wikipedia, La Enciclopedia Libre PDFCarlos Andres Castro MejiaNo ratings yet
- Controlador Motor Paso A PasoDocument20 pagesControlador Motor Paso A PasoJaime SabinesNo ratings yet
- Control de Motores A Pasos Con El ATmega AVR en CDocument5 pagesControl de Motores A Pasos Con El ATmega AVR en CHenry Bernard Varas ConchaNo ratings yet
- Driver para Motores Paso A Paso Bipolares Con 74LS194 - UcontrolDocument20 pagesDriver para Motores Paso A Paso Bipolares Con 74LS194 - Ucontrolcarlosgabriel1971No ratings yet
- CONTROL MOTOR PASO A PASODocument12 pagesCONTROL MOTOR PASO A PASOFé Gabriela100% (1)
- Lab Sem 5 Control de Motor MPAP UnipolarDocument8 pagesLab Sem 5 Control de Motor MPAP Unipolarwilliam coronadoNo ratings yet
- Motor paso a paso práctica informeDocument15 pagesMotor paso a paso práctica informeOscar Pedro NavazNo ratings yet
- Proyectos Con SensoresDocument21 pagesProyectos Con SensoresLimber PeredoNo ratings yet
- Driver paso a paso 74LS194Document19 pagesDriver paso a paso 74LS194cb237flx5705No ratings yet
- Objetivo 2Document21 pagesObjetivo 2XavierZITNo ratings yet
- Carro Detecta ObstáculosDocument9 pagesCarro Detecta ObstáculosJavier ArangurenNo ratings yet
- Impresora Motores Paso A PasoDocument26 pagesImpresora Motores Paso A PasoneogatsNo ratings yet
- Motor A Pasos de Izquierda y Derecha y Dos Puhs BotonDocument14 pagesMotor A Pasos de Izquierda y Derecha y Dos Puhs Botonjuan sebastian perez martinez100% (1)
- P0x Control de Motor PasoDocument5 pagesP0x Control de Motor PasoMarco Antonio Quispe QuispeNo ratings yet
- Introduccion A Los ServomotoresDocument14 pagesIntroduccion A Los ServomotoresL30N1No ratings yet
- Control de velocidad de motores DC mediante rectificador semicontroladoDocument7 pagesControl de velocidad de motores DC mediante rectificador semicontroladoelkin hernandezNo ratings yet
- Control Por Puerto Paralelo de Un Motor A PasosDocument5 pagesControl Por Puerto Paralelo de Un Motor A PasosEduardo García100% (1)
- Descripción, Modelo, Análisis y Control Del PendubotDocument21 pagesDescripción, Modelo, Análisis y Control Del PendubotmikevillarrNo ratings yet
- Control de Motor de PasoDocument4 pagesControl de Motor de PasoKevin PechoNo ratings yet
- Lección 16 Controlar Un Motor de Pasos Con Un Mando A DistanciaDocument10 pagesLección 16 Controlar Un Motor de Pasos Con Un Mando A DistanciaOziel CaballeroNo ratings yet
- Circuito Del Sensor de Posición Del Acelerador - ProbarDocument7 pagesCircuito Del Sensor de Posición Del Acelerador - ProbarCristopher LaosNo ratings yet
- El Motor Paso A Paso Es Un Dispositivo Electromecánico Que Convierte Una Serie de Impulsos Eléctricos en Desplazamientos Angulares DiscretosDocument4 pagesEl Motor Paso A Paso Es Un Dispositivo Electromecánico Que Convierte Una Serie de Impulsos Eléctricos en Desplazamientos Angulares DiscretosMarilyn ParejoNo ratings yet
- Lab3 Conttrol Diigtal 20013aDocument15 pagesLab3 Conttrol Diigtal 20013aGustavo Garcia QuintanaNo ratings yet
- Informe SemaforoDocument17 pagesInforme SemaforoErick Gabriel Chiroque Silopú100% (4)
- Practica de Motor A PasosDocument15 pagesPractica de Motor A Pasosmartin50No ratings yet
- UET S Trabajo Final Primer QuimestreDocument21 pagesUET S Trabajo Final Primer QuimestreNathaly KarinaNo ratings yet
- Laboratorio 5Document26 pagesLaboratorio 5Louie Derek OrtizNo ratings yet
- 06 P02 DLP PiQ2Document44 pages06 P02 DLP PiQ2SANTOS LOPEZ LUIS ENRIQUENo ratings yet
- Práctica 2 Microcontroladores Néstor Barba - Alfredo GutiérrezDocument36 pagesPráctica 2 Microcontroladores Néstor Barba - Alfredo GutiérrezCarlos BarbaNo ratings yet
- LH4Document16 pagesLH4Odläniier JuniiOr Chávarry CancinoNo ratings yet
- Motor BipolarDocument12 pagesMotor BipolarsaminxavierNo ratings yet
- Driver paso a paso de bajo costo con 74LS194Document19 pagesDriver paso a paso de bajo costo con 74LS194Valentin Jhoverty Gonzalez MoralesNo ratings yet
- Informe 3Document7 pagesInforme 3Flakita S MelcOchitaNo ratings yet
- AC AC TrifasicosDocument113 pagesAC AC Trifasicoswildpere50% (2)
- Control Motor TecladoDocument14 pagesControl Motor TecladoAdolfo Rojas ArellanoNo ratings yet
- Arranque motor inducciónDocument3 pagesArranque motor inducciónbryan eduardo villegas carrascoNo ratings yet
- Guia de Laboratorio 3, 4 UNIFRANZDocument9 pagesGuia de Laboratorio 3, 4 UNIFRANZjhoselinNo ratings yet
- Practica SSW05Document32 pagesPractica SSW05lghilardi79No ratings yet
- EG-1162-Tarqui Quispe, David EdgarDocument39 pagesEG-1162-Tarqui Quispe, David EdgarJhimmi limbert Quispe pairoNo ratings yet
- Control de motor de inducción trifásico con PLCDocument7 pagesControl de motor de inducción trifásico con PLCMiguel Perez FloresNo ratings yet
- Motor Paso A Paso y ServoDocument10 pagesMotor Paso A Paso y ServoOMAR OLSIM MAMANI COSMENo ratings yet
- MotAsincTrifásicoDocument14 pagesMotAsincTrifásicoMARTIN RENE ORTEGANo ratings yet
- Driver para Motores Paso A Paso Unipolares Con 74LS194Document20 pagesDriver para Motores Paso A Paso Unipolares Con 74LS194Mijail Vereau Sánchez100% (1)
- L5 Motor Jaula de Ardilla-1 (2)Document15 pagesL5 Motor Jaula de Ardilla-1 (2)Juan Gustavo Davila FloresNo ratings yet
- Practica 7 SensoresDocument28 pagesPractica 7 SensoresRaul PueenteeNo ratings yet
- P09 Control de MotoresDocument11 pagesP09 Control de MotoresRodrigoBrianMamaniNo ratings yet
- EJERCICIO Motor Paso A Paso UnipolarDocument4 pagesEJERCICIO Motor Paso A Paso Unipolaragauss0% (1)
- Control de Motores Paso A Paso Con ArduinoDocument35 pagesControl de Motores Paso A Paso Con ArduinoEfrainRodrigoAjataNo ratings yet
- Control de Velocidad de Un Servomotor de CCDocument15 pagesControl de Velocidad de Un Servomotor de CCScamer RosalesNo ratings yet
- 11 Aplicacion Del 8051Document12 pages11 Aplicacion Del 8051Jordan Ordoño AguirreNo ratings yet
- Como Utilizar Motores Paso A Paso Con FPGADocument7 pagesComo Utilizar Motores Paso A Paso Con FPGANigmanBNo ratings yet
- Circuito Del Sensor de Posición Del Acelerador - Probar PDFDocument8 pagesCircuito Del Sensor de Posición Del Acelerador - Probar PDFcarlosNo ratings yet
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoFrom EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoRating: 5 out of 5 stars5/5 (1)
- WinCC Lectura - Escritura Tags (Ansi C - VBScript)Document2 pagesWinCC Lectura - Escritura Tags (Ansi C - VBScript)Fernando Moran ContrerasNo ratings yet
- La Guia MetAs 02 11 RTDDocument4 pagesLa Guia MetAs 02 11 RTDjmrozo3No ratings yet
- Guía de Uso PID para ArduinoDocument28 pagesGuía de Uso PID para ArduinoWashington Quevedo100% (1)
- WCC Professional V13 SP2 Prog EsES Es-ESDocument2,312 pagesWCC Professional V13 SP2 Prog EsES Es-ESFernando Moran ContrerasNo ratings yet
- Análisis Cualitativo de RiesgosDocument7 pagesAnálisis Cualitativo de RiesgosFernando Moran ContrerasNo ratings yet
- PID AnalogicoDocument47 pagesPID AnalogicoEfra Efra ParraNo ratings yet
- Apuntes Caso NegociosDocument7 pagesApuntes Caso NegociosFernando Moran ContrerasNo ratings yet
- FIX SolidworksDocument3 pagesFIX SolidworksFernando Moran ContrerasNo ratings yet
- Aplicar materiales Vismat con V-Ray SUDocument6 pagesAplicar materiales Vismat con V-Ray SUCesar Ivan Hernandez LopezNo ratings yet
- Apuntes Caso NegociosDocument7 pagesApuntes Caso NegociosFernando Moran ContrerasNo ratings yet
- Mecanica de Fluidos (Bueno)Document40 pagesMecanica de Fluidos (Bueno)Mayor Paz GonzálezNo ratings yet
- La Guia MetAs 02 11 RTDDocument4 pagesLa Guia MetAs 02 11 RTDjmrozo3No ratings yet
- Diseño y Fabricacion de Un Cono TruncadoDocument8 pagesDiseño y Fabricacion de Un Cono TruncadoFernando Moran ContrerasNo ratings yet
- Template For FODADocument1 pageTemplate For FODAFernando Moran ContrerasNo ratings yet
- Rectificadores y Filtrospdf PDFDocument20 pagesRectificadores y Filtrospdf PDFGlomile100% (1)
- Rectificadores y Filtrospdf PDFDocument20 pagesRectificadores y Filtrospdf PDFGlomile100% (1)
- Puente de MaxwellDocument2 pagesPuente de MaxwellFernando Moran ContrerasNo ratings yet
- Semiconductoresmh 150515143247 Lva1 App6891Document80 pagesSemiconductoresmh 150515143247 Lva1 App6891Arturo Martinez PerezNo ratings yet
- Sintesis3 FinDocument21 pagesSintesis3 FinArley Machado BedoyaNo ratings yet
- Control 1 PDFDocument21 pagesControl 1 PDFFernando Moran ContrerasNo ratings yet
- Problemas de Valor InicialDocument3 pagesProblemas de Valor InicialFernando Moran ContrerasNo ratings yet
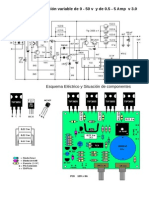
- Fuente de Alimentación Variable de 0 - 50 V y de 0.5 - 5 AmpDocument2 pagesFuente de Alimentación Variable de 0 - 50 V y de 0.5 - 5 AmpFernando Moran ContrerasNo ratings yet
- Calculos de Electricidad para IluminacionDocument1 pageCalculos de Electricidad para IluminacionFernando Moran ContrerasNo ratings yet
- Trabajo y Energía May13 SolDocument10 pagesTrabajo y Energía May13 SolPilco LëťïççïăNo ratings yet
- Problemas ResueltosDocument479 pagesProblemas ResueltosDaniels Ignacio Retamal Herrera91% (11)
- Ejercicios Resueltos de DerivadasDocument19 pagesEjercicios Resueltos de Derivadaskar66696% (27)
- Fluke 1276Document96 pagesFluke 1276Fernando Moran ContrerasNo ratings yet
- Ejercicios Resueltos de DerivadasDocument24 pagesEjercicios Resueltos de DerivadasFernando Moran ContrerasNo ratings yet
- Ejercicios Resueltos de DerivadasDocument19 pagesEjercicios Resueltos de Derivadaskar66696% (27)
- Dispositivos Auxiliares Del CarburadorDocument7 pagesDispositivos Auxiliares Del CarburadorYoisNo ratings yet
- Noviembre - 4to Grado Matemáticas (2018-2019)Document14 pagesNoviembre - 4to Grado Matemáticas (2018-2019)CAROLINA MARQUEZ CASTILLONo ratings yet
- Impresoras DeskjetDocument3 pagesImpresoras DeskjetemesticaNo ratings yet
- Regla de Trapecio y Simpson 1Document20 pagesRegla de Trapecio y Simpson 1Nilma Fiorella Quispe EnriquezNo ratings yet
- Foro Semana 5 y 6 - PROGRAMACION DE COMPUTADORESDocument4 pagesForo Semana 5 y 6 - PROGRAMACION DE COMPUTADORESjuan estebanNo ratings yet
- InvestigacionDocument6 pagesInvestigacionJoel Abel Pin EspinalNo ratings yet
- Problemas de Estática 1° y 2° CapítulosDocument16 pagesProblemas de Estática 1° y 2° CapítulosdangcasNo ratings yet
- Semana 4 Matemática 1º SecundariaDocument10 pagesSemana 4 Matemática 1º SecundariaALEX MOISES CORTEZ GUTIERREZNo ratings yet
- Vagabundeo PolarDocument2 pagesVagabundeo PolarMonserrat Cruz SáenzNo ratings yet
- Taller Estadistica ProbabilidadDocument9 pagesTaller Estadistica ProbabilidadLiseth GomezNo ratings yet
- Medio Construido RA8.4-G1Document7 pagesMedio Construido RA8.4-G1Victor ValdezNo ratings yet
- Guia Tecnica Clavado Gas PolvoraDocument67 pagesGuia Tecnica Clavado Gas Polvorama_coelloNo ratings yet
- Ejercicio FisicaDocument2 pagesEjercicio FisicaArian WuNo ratings yet
- Termodinámica QuímicaDocument7 pagesTermodinámica QuímicaJimmyRiveraNo ratings yet
- Simulacro Cepre UnhDocument2 pagesSimulacro Cepre UnhEber Alaniz0% (1)
- Manual CuencasDocument117 pagesManual CuencasHector SolanoNo ratings yet
- Unidad 4 Cadenas de MarkovDocument19 pagesUnidad 4 Cadenas de MarkovCristofer MagañaNo ratings yet
- Las Fórmulas - ExcelDocument24 pagesLas Fórmulas - ExcelJuanManuelArchilaMejiaNo ratings yet
- Factores y técnicas de control en el cultivo de arándanosDocument82 pagesFactores y técnicas de control en el cultivo de arándanosnelly100% (1)
- Descripcion de Una Interfaz OBDII PDFDocument4 pagesDescripcion de Una Interfaz OBDII PDFOscar GutierrezNo ratings yet
- Tablas de CentroidesDocument4 pagesTablas de CentroidesLuis Zavaleta RomeroNo ratings yet
- Tapa de Libro BPMNDocument2 pagesTapa de Libro BPMNxrommel16xNo ratings yet
- Practica FisicoquimciaDocument6 pagesPractica FisicoquimciaDAYANA MICHELL SANTANA PINTONo ratings yet
- T1 Sistemas de Ecuaciones 2x2 MAT 3 ALG LINEAL 15082021Document2 pagesT1 Sistemas de Ecuaciones 2x2 MAT 3 ALG LINEAL 15082021CARLOS CABEZASNo ratings yet
- Criterios de Selección de HardwareDocument3 pagesCriterios de Selección de HardwareHeiner FonsecaNo ratings yet
- Econometria II Trabajo FinalDocument24 pagesEconometria II Trabajo FinalMiguelRezaHornaNo ratings yet
- Matrices - Sistema ecuacionesDocument3 pagesMatrices - Sistema ecuacionesNilia Robles RamirezNo ratings yet
- Tarea I, Informatica UAPADocument2 pagesTarea I, Informatica UAPAWilly Mays0% (1)