You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- VP Construction Real Estate Development in NY NJ Resume Edward CondolonDocument4 pagesVP Construction Real Estate Development in NY NJ Resume Edward CondolonEdwardCondolonNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chapter Two Complexity AnalysisDocument40 pagesChapter Two Complexity AnalysisSoressa HassenNo ratings yet
- Preventing OOS DeficienciesDocument65 pagesPreventing OOS Deficienciesnsk79in@gmail.comNo ratings yet
- Amazon Case StudyDocument22 pagesAmazon Case StudySaad Memon50% (6)
- Steam Source Book PDFDocument108 pagesSteam Source Book PDFJose Levican A100% (1)
- Power Electronics Slides and Notes DC ConvertersDocument40 pagesPower Electronics Slides and Notes DC ConvertersAnoop MathewNo ratings yet
- Managerial Accounting-Fundamental Concepts and Costing Systems For Cost Analysis Module 1Document40 pagesManagerial Accounting-Fundamental Concepts and Costing Systems For Cost Analysis Module 1Uzma Khan100% (1)
- Artsenz Biz PlanDocument1 pageArtsenz Biz PlanAnoop MathewNo ratings yet
- Armature Reaction and CommutationDocument4 pagesArmature Reaction and CommutationAnoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch29Document12 pagesPower Electronics Ned Mohan Slides Ch29Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch30Document48 pagesPower Electronics Ned Mohan Slides Ch30Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch30Document48 pagesPower Electronics Ned Mohan Slides Ch30Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch26Document44 pagesPower Electronics Ned Mohan Slides Ch26Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch26Document44 pagesPower Electronics Ned Mohan Slides Ch26Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch28Document26 pagesPower Electronics Ned Mohan Slides Ch28Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch29Document12 pagesPower Electronics Ned Mohan Slides Ch29Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch22Document35 pagesPower Electronics Ned Mohan Slides Ch22Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch21Document27 pagesPower Electronics Ned Mohan Slides Ch21Anoop MathewNo ratings yet
- Power Electronics Ned Mohan Slides Ch19Document17 pagesPower Electronics Ned Mohan Slides Ch19Anoop MathewNo ratings yet
- Starkville Dispatch Eedition 12-9-18Document28 pagesStarkville Dispatch Eedition 12-9-18The DispatchNo ratings yet
- Numerical Transformer Differential RelayDocument2 pagesNumerical Transformer Differential RelayTariq Mohammed OmarNo ratings yet
- Leeka Kheifets PrincipleDocument6 pagesLeeka Kheifets PrincipleAlexandreau del FierroNo ratings yet
- C Sharp Logical TestDocument6 pagesC Sharp Logical TestBogor0251No ratings yet
- V Series: Three Wheel, Counterbalanced Lift TruckDocument126 pagesV Series: Three Wheel, Counterbalanced Lift TruckВиктор МушкинNo ratings yet
- Terms and Conditions 27 06 PDFDocument4 pagesTerms and Conditions 27 06 PDFShreyash NaikwadiNo ratings yet
- Matrix of Consumer Agencies and Areas of Concern: Specific Concern Agency ConcernedDocument4 pagesMatrix of Consumer Agencies and Areas of Concern: Specific Concern Agency ConcernedAJ SantosNo ratings yet
- Oxygen BarrierDocument20 pagesOxygen BarrierKarina ArdizziNo ratings yet
- Sangeetahealingtemples Com Tarot Card Reading Course in UsaDocument3 pagesSangeetahealingtemples Com Tarot Card Reading Course in UsaSangeetahealing templesNo ratings yet
- Document 3Document3 pagesDocument 3AdeleNo ratings yet
- PanasonicDocument35 pagesPanasonicAsif Shaikh0% (1)
- Unit 5 Andhra Pradesh.Document18 pagesUnit 5 Andhra Pradesh.Charu ModiNo ratings yet
- Reference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsDocument43 pagesReference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsNisha JosephNo ratings yet
- Bismillah SpeechDocument2 pagesBismillah SpeechanggiNo ratings yet
- Quantum Hopfield NetworksDocument83 pagesQuantum Hopfield NetworksSiddharth SharmaNo ratings yet
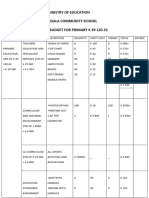
- Ministry of Education Musala SCHDocument5 pagesMinistry of Education Musala SCHlaonimosesNo ratings yet
- Pega AcademyDocument10 pagesPega AcademySasidharNo ratings yet
- Heat Exchanger Designing Using Aspen PlusDocument6 pagesHeat Exchanger Designing Using Aspen PlusMeethiPotterNo ratings yet
- Entrep Q4 - Module 7Document5 pagesEntrep Q4 - Module 7Paula DT PelitoNo ratings yet
- Beam Deflection by Double Integration MethodDocument21 pagesBeam Deflection by Double Integration MethodDanielle Ruthie GalitNo ratings yet
- Remuneration Is Defined As Payment or Compensation Received For Services or Employment andDocument3 pagesRemuneration Is Defined As Payment or Compensation Received For Services or Employment andWitty BlinkzNo ratings yet
- Minor Project Report Format MCADocument11 pagesMinor Project Report Format MCAAnurag AroraNo ratings yet
- Insurance Smart Sampoorna RakshaDocument10 pagesInsurance Smart Sampoorna RakshaRISHAB CHETRINo ratings yet
- Go Ask Alice EssayDocument6 pagesGo Ask Alice Essayafhbexrci100% (2)