You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Mwangangietal2012 MosquitodiversityinMalindiDocument14 pagesMwangangietal2012 MosquitodiversityinMalindimemrah2955No ratings yet
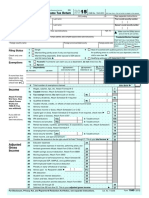
- U.S. Individual Income Tax ReturnDocument2 pagesU.S. Individual Income Tax Returnapi-310622354No ratings yet
- Introduction to Simulink Modeling of Dynamic SystemsDocument10 pagesIntroduction to Simulink Modeling of Dynamic SystemsCinthia FarfánNo ratings yet
- The Hybrid Pneumatic-Numerical Model of Lungs - Metrological Aspects of The DesignDocument5 pagesThe Hybrid Pneumatic-Numerical Model of Lungs - Metrological Aspects of The Designmemrah2955No ratings yet
- ECS203 - Handout 3B PDFDocument6 pagesECS203 - Handout 3B PDFmemrah2955No ratings yet
- HN Pub 4 - Resp ModelsDocument8 pagesHN Pub 4 - Resp Modelsmemrah2955No ratings yet
- Transistor 3Document56 pagesTransistor 3Mo IbraNo ratings yet
- Electronic Devices and CircuitsDocument2 pagesElectronic Devices and CircuitsKing AshokNo ratings yet
- Single Stub Matching TutorialDocument23 pagesSingle Stub Matching Tutorialshahid78No ratings yet
- 2 Steady-State Response of Electrodes FullDocument11 pages2 Steady-State Response of Electrodes Fullmemrah2955No ratings yet
- Routh Hurwitz AnalysisDocument29 pagesRouth Hurwitz Analysisilg1No ratings yet
- Basic Probability Theory by Robert B. AshDocument350 pagesBasic Probability Theory by Robert B. AshLuki Bangun Subekti100% (1)
- 2006MXu PA ReviewDocument22 pages2006MXu PA Reviewmemrah2955No ratings yet
- Simulación Computacional de Transporte de Gas Del Sistema Respiratorio Humano Utilizando Redes FractalesDocument6 pagesSimulación Computacional de Transporte de Gas Del Sistema Respiratorio Humano Utilizando Redes FractalesEndless LoveNo ratings yet
- JPD 36 2003 R167Document15 pagesJPD 36 2003 R167memrah2955No ratings yet
- Nanoparticle FuntionalizationDocument9 pagesNanoparticle Funtionalizationmemrah2955No ratings yet
- Bergere THDocument2 pagesBergere THmemrah2955No ratings yet
- BiomedDocument107 pagesBiomedkarthickchloroNo ratings yet
- BiomedicineDocument34 pagesBiomedicinememrah2955No ratings yet
- Vectors SummaryDocument2 pagesVectors Summarymemrah2955100% (1)
- Burrows2 - 90 - FourierTransform UnitStepFunctionDocument8 pagesBurrows2 - 90 - FourierTransform UnitStepFunctionVivek KumarNo ratings yet
- Bachelorthesis Van Anton Delawari en Reinier Doelman Juni 2010Document72 pagesBachelorthesis Van Anton Delawari en Reinier Doelman Juni 2010memrah2955No ratings yet
- Build your own vehicle frame with XYZ SPACEFRAME VEHICLESDocument12 pagesBuild your own vehicle frame with XYZ SPACEFRAME VEHICLESLornaLFryeNo ratings yet
- Intro To LV in 3 Hours For Control and Sim 8 - 5Document68 pagesIntro To LV in 3 Hours For Control and Sim 8 - 5memrah2955No ratings yet
- Inner Product SpacesDocument11 pagesInner Product Spacesmemrah2955No ratings yet
- Defining Life and Its OriginsDocument10 pagesDefining Life and Its OriginsKris Cowell LlorensNo ratings yet
- Duality PDFDocument11 pagesDuality PDFmemrah2955No ratings yet
- Electrical SI Units - International System of UnitsDocument7 pagesElectrical SI Units - International System of UnitsArjunGuptaNo ratings yet
- Life Cycle Assessment of Various Cropping Systems Utilized For Producing Biofuels: Bioethanol and BiodieselDocument14 pagesLife Cycle Assessment of Various Cropping Systems Utilized For Producing Biofuels: Bioethanol and Biodieselmemrah2955No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Job Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaDocument45 pagesJob Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaClaudette Clemente100% (1)
- Hipotension 6Document16 pagesHipotension 6arturo castilloNo ratings yet
- Kathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Document236 pagesKathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Csongor KicsiNo ratings yet
- Staffing Process and Job AnalysisDocument8 pagesStaffing Process and Job AnalysisRuben Rosendal De Asis100% (1)
- Open Far CasesDocument8 pagesOpen Far CasesGDoony8553No ratings yet
- CS709 HandoutsDocument117 pagesCS709 HandoutsalexNo ratings yet
- OS LabDocument130 pagesOS LabSourav BadhanNo ratings yet
- Unr Ece R046Document74 pagesUnr Ece R046rianteri1125No ratings yet
- Brochure en 2014 Web Canyon Bikes How ToDocument36 pagesBrochure en 2014 Web Canyon Bikes How ToRadivizija PortalNo ratings yet
- 2021 JHS INSET Template For Modular/Online Learning: Curriculum MapDocument15 pages2021 JHS INSET Template For Modular/Online Learning: Curriculum MapDremie WorksNo ratings yet
- Display PDFDocument6 pagesDisplay PDFoneoceannetwork3No ratings yet
- Big Joe Pds30-40Document198 pagesBig Joe Pds30-40mauro garciaNo ratings yet
- Trillium Seismometer: User GuideDocument34 pagesTrillium Seismometer: User GuideDjibril Idé AlphaNo ratings yet
- Felizardo C. Lipana National High SchoolDocument3 pagesFelizardo C. Lipana National High SchoolMelody LanuzaNo ratings yet
- Unit 14 Ergonomics Design: AND ProductDocument24 pagesUnit 14 Ergonomics Design: AND ProductRämêşh KątúřiNo ratings yet
- Cot 2Document3 pagesCot 2Kathjoy ParochaNo ratings yet
- Case Study IndieDocument6 pagesCase Study IndieDaniel YohannesNo ratings yet
- WindSonic GPA Manual Issue 20Document31 pagesWindSonic GPA Manual Issue 20stuartNo ratings yet
- Paradigms of ManagementDocument2 pagesParadigms of ManagementLaura TicoiuNo ratings yet
- CBSE Class 6 Whole Numbers WorksheetDocument2 pagesCBSE Class 6 Whole Numbers WorksheetPriyaprasad PandaNo ratings yet
- Learning Activity Sheet: 3 Quarter Week 1 Mathematics 2Document8 pagesLearning Activity Sheet: 3 Quarter Week 1 Mathematics 2Dom MartinezNo ratings yet
- MQC Lab Manual 2021-2022-AutonomyDocument39 pagesMQC Lab Manual 2021-2022-AutonomyAniket YadavNo ratings yet
- Three Comparison of Homoeopathic MedicinesDocument22 pagesThree Comparison of Homoeopathic MedicinesSayeed AhmadNo ratings yet
- Returnable Goods Register: STR/4/005 Issue 1 Page1Of1Document1 pageReturnable Goods Register: STR/4/005 Issue 1 Page1Of1Zohaib QasimNo ratings yet
- Ielts Practice Tests: ListeningDocument19 pagesIelts Practice Tests: ListeningKadek Santiari DewiNo ratings yet
- Paper 4 (A) (I) IGCSE Biology (Time - 30 Mins)Document12 pagesPaper 4 (A) (I) IGCSE Biology (Time - 30 Mins)Hisham AlEnaiziNo ratings yet
- Vector 4114NS Sis TDSDocument2 pagesVector 4114NS Sis TDSCaio OliveiraNo ratings yet
- Longman ESOL Skills For Life - ShoppingDocument4 pagesLongman ESOL Skills For Life - ShoppingAstri Natalia Permatasari83% (6)
- A Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsDocument9 pagesA Database of Chromatographic Properties and Mass Spectra of Fatty Acid Methyl Esters From Omega-3 ProductsmisaelNo ratings yet
- British Universal Steel Columns and Beams PropertiesDocument6 pagesBritish Universal Steel Columns and Beams PropertiesjagvishaNo ratings yet