You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Basic Well Log Analysis For Geologists PDFDocument233 pagesBasic Well Log Analysis For Geologists PDFAbdul RehazkNo ratings yet
- Physics Assessment 3 Year 11 - Vehicle Safety BeltsDocument5 pagesPhysics Assessment 3 Year 11 - Vehicle Safety Beltsparacin8131No ratings yet
- The Roots of Racism and Abortion: An Exploration of Eugenics - John Cavanaugh O'KeefeDocument122 pagesThe Roots of Racism and Abortion: An Exploration of Eugenics - John Cavanaugh O'KeefeTheLibertyChannel100% (3)
- Eight Maxims of StrategyDocument2 pagesEight Maxims of StrategyKalkiHereNo ratings yet
- Chinese Language Textbook Recommended AdultDocument10 pagesChinese Language Textbook Recommended Adulternids001No ratings yet
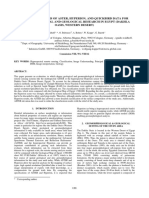
- Spectral Analysis of Aster, Hyperion, and Quickbird Geomophological and Geolical Research in EgyptDocument6 pagesSpectral Analysis of Aster, Hyperion, and Quickbird Geomophological and Geolical Research in EgyptLiliana Maria Plata SarmientoNo ratings yet
- The Report of The Satellite-Borne Hyperion Hyperspectral Vnir-Swir Imagin System For Mineral Mapping at Mount Fitton, South AustraliaDocument3 pagesThe Report of The Satellite-Borne Hyperion Hyperspectral Vnir-Swir Imagin System For Mineral Mapping at Mount Fitton, South AustraliaLiliana Maria Plata SarmientoNo ratings yet
- Spectral Indices For Lithologic Mapping With Aster Thermal InfraredDocument3 pagesSpectral Indices For Lithologic Mapping With Aster Thermal InfraredLiliana Maria Plata SarmientoNo ratings yet
- Argilic Alteration Spectrometry Economic GeologyDocument44 pagesArgilic Alteration Spectrometry Economic GeologyLiliana Maria Plata SarmientoNo ratings yet
- Aster Spectral Ratioing For Lithological Mapping EgyptDocument10 pagesAster Spectral Ratioing For Lithological Mapping EgyptLiliana Maria Plata SarmientoNo ratings yet
- TCT Landsat8Document11 pagesTCT Landsat8Liliana Maria Plata SarmientoNo ratings yet
- Paipa Geothermal System, Boyacá: Review of Exploration Studies and Conceptual ModelDocument36 pagesPaipa Geothermal System, Boyacá: Review of Exploration Studies and Conceptual ModelLiliana Maria Plata SarmientoNo ratings yet
- Comparison of Litholigic Mapping With Aster, Hyperion and Etm DataDocument7 pagesComparison of Litholigic Mapping With Aster, Hyperion and Etm DataLiliana Maria Plata SarmientoNo ratings yet
- Lammoglia & Souza Filho - Surveys in Geophysics - OffprintDocument27 pagesLammoglia & Souza Filho - Surveys in Geophysics - OffprintLiliana Maria Plata SarmientoNo ratings yet
- Analysis of Rapideye Red Edge Band - CR de Souza Et AlDocument6 pagesAnalysis of Rapideye Red Edge Band - CR de Souza Et AlLiliana Maria Plata SarmientoNo ratings yet
- An Atmospheric Correction Parameter Calculator For A Single Themal BandDocument3 pagesAn Atmospheric Correction Parameter Calculator For A Single Themal BandLiliana Maria Plata SarmientoNo ratings yet
- Soil Taxonomy ClassificationDocument8 pagesSoil Taxonomy ClassificationBug AphidNo ratings yet
- Fuzzy Vs IsodataDocument7 pagesFuzzy Vs IsodataLiliana Maria Plata SarmientoNo ratings yet
- Kunci Taksonomi Tanah USDA 2014Document372 pagesKunci Taksonomi Tanah USDA 2014Bachrul Ulum, SPNo ratings yet
- Chapter 17Document20 pagesChapter 17Florina PrisacaruNo ratings yet
- Journal of Petroleum Science and Engineering: SciencedirectDocument11 pagesJournal of Petroleum Science and Engineering: SciencedirectLiliana Maria Plata SarmientoNo ratings yet
- A Glossary List of GeologyDocument203 pagesA Glossary List of GeologyOmkar BapatNo ratings yet
- Multiscale Pore Structure Characterization SEMDocument11 pagesMultiscale Pore Structure Characterization SEMLiliana Maria Plata SarmientoNo ratings yet
- Fundamentals of PetrophysicsDocument509 pagesFundamentals of PetrophysicsPepiño100% (3)
- Chapter 19 Electrical Logs PDFDocument24 pagesChapter 19 Electrical Logs PDFLiliana Maria Plata SarmientoNo ratings yet
- Chapter 4: Coring, Preservation and HandlingDocument10 pagesChapter 4: Coring, Preservation and HandlingSoubhagya Ranjan DasNo ratings yet
- Soil Taxonomy ClassificationDocument8 pagesSoil Taxonomy ClassificationBug AphidNo ratings yet
- Rock Physics Bases Carbonate Pore Type CharacterizationDocument11 pagesRock Physics Bases Carbonate Pore Type CharacterizationLiliana Maria Plata SarmientoNo ratings yet
- Petrophysics P.gloverDocument376 pagesPetrophysics P.gloverEstefania Rodriguez Tellez91% (22)
- Extensional Margin PDFDocument13 pagesExtensional Margin PDFLiliana Maria Plata SarmientoNo ratings yet
- 2018IribarneetalAAPG117 PDFDocument27 pages2018IribarneetalAAPG117 PDFLiliana Maria Plata SarmientoNo ratings yet
- The Do-It-Yourself Dip and Strike Model (With DIY Clinometer)Document5 pagesThe Do-It-Yourself Dip and Strike Model (With DIY Clinometer)Liliana Maria Plata SarmientoNo ratings yet
- Explanation of Dip and StrikeDocument9 pagesExplanation of Dip and Strikedist2235No ratings yet
- GEOL 2300 - Google Earth - Determining Strike and DipDocument2 pagesGEOL 2300 - Google Earth - Determining Strike and DipLiliana Maria Plata SarmientoNo ratings yet
- About QliphothDocument6 pagesAbout Qliphothsergeik.scribd100% (1)
- College Graduation SpeechDocument2 pagesCollege Graduation SpeechAndre HiyungNo ratings yet
- Social Science 1100: Readings in Philippine History: Instructional Module For The CourseDocument15 pagesSocial Science 1100: Readings in Philippine History: Instructional Module For The CourseXynNo ratings yet
- Service BlueprintDocument10 pagesService BlueprintSam AlexanderNo ratings yet
- Albert Einstein: Einstein's Early YearsDocument21 pagesAlbert Einstein: Einstein's Early YearsAimee HernandezNo ratings yet
- Plato's Sophist Non-Being and The BeardDocument15 pagesPlato's Sophist Non-Being and The BeardPhilip Reynor Jr.No ratings yet
- Under Down UnderDocument698 pagesUnder Down Underttreks100% (3)
- CH 12. Risk Evaluation in Capital BudgetingDocument29 pagesCH 12. Risk Evaluation in Capital BudgetingN-aineel DesaiNo ratings yet
- Verbal Group. Transitivity and ErgativityDocument23 pagesVerbal Group. Transitivity and ErgativityJomartNo ratings yet
- Kuk YogaDocument14 pagesKuk YogaVijay KumarNo ratings yet
- Fulltext01 PDFDocument42 pagesFulltext01 PDFLă Țîțe SouzîtăNo ratings yet
- Money As Tool Money As Drug Lea WebleyDocument32 pagesMoney As Tool Money As Drug Lea WebleyMaria BraitiNo ratings yet
- Habit 1 - Be Proactive: Stephen CoveyDocument7 pagesHabit 1 - Be Proactive: Stephen CoveyAmitrathorNo ratings yet
- Ten Best Conspiracy Websites Cabaltimes - Com-8Document8 pagesTen Best Conspiracy Websites Cabaltimes - Com-8Keith KnightNo ratings yet
- CS 213 M: Introduction: Abhiram RanadeDocument24 pagesCS 213 M: Introduction: Abhiram RanadeTovaNo ratings yet
- Geography World Landmark Game Presentation-3Document12 pagesGeography World Landmark Game Presentation-34w6hsqd4fkNo ratings yet
- 26 BhargaviDocument13 pages26 BhargaviSrishti SrivastavaNo ratings yet
- EBS The Effects of The Fall of ManDocument12 pagesEBS The Effects of The Fall of ManAlbert A. MaglasangNo ratings yet
- Buried BodiesDocument2 pagesBuried BodiesNeil Ian S. OchoaNo ratings yet
- My Husband Wants To Spend My Inheritance MoneyDocument2 pagesMy Husband Wants To Spend My Inheritance MoneyDANIELANo ratings yet
- An Interview With Thomas Metzinger What Is The SelfDocument2 pagesAn Interview With Thomas Metzinger What Is The SelfIdelfonso Vidal100% (1)
- Lesson Plan The Mountain That Loved A BIRD by Sheena E. BernalDocument6 pagesLesson Plan The Mountain That Loved A BIRD by Sheena E. BernalSheEna Brnl100% (1)
- MS AldayDocument41 pagesMS AldayRogelio Lupian ElemiaNo ratings yet
- Makalah Narative Seri 2Document9 pagesMakalah Narative Seri 2Kadir JavaNo ratings yet
- Compensation: Third Canadian Edition Milkovich, Newman, ColeDocument28 pagesCompensation: Third Canadian Edition Milkovich, Newman, ColeNeha AgarwalNo ratings yet
- MCQ On Testing of Hypothesis 1111Document7 pagesMCQ On Testing of Hypothesis 1111nns2770100% (1)