You might also like
- How To Add OpenMPI To CodeblocksDocument1 pageHow To Add OpenMPI To CodeblocksSerdar BilgeNo ratings yet
- Repeated Eigenvalues 2Document17 pagesRepeated Eigenvalues 2Serdar BilgeNo ratings yet
- Repeated EigenvaluesDocument16 pagesRepeated EigenvaluesSerdar BilgeNo ratings yet
- StaticDocument3 pagesStaticSerdar BilgeNo ratings yet
- OrthogonalityDocument1 pageOrthogonalitySerdar BilgeNo ratings yet
- MATRIX EXPONENTIALDocument23 pagesMATRIX EXPONENTIALSerdar BilgeNo ratings yet
- 1 Orthogonality of Cosine, Sine and Complex ExponentialsDocument5 pages1 Orthogonality of Cosine, Sine and Complex ExponentialsSerdar BilgeNo ratings yet
- CFD LearnDocument20 pagesCFD LearnAbed NaemNo ratings yet
- Ode 11Document4 pagesOde 11Muhammad Saad ArshadNo ratings yet
- Trig Cheat SheetDocument4 pagesTrig Cheat Sheetapi-284574585No ratings yet
- Laplace Derivatives PDFDocument18 pagesLaplace Derivatives PDFSerdar BilgeNo ratings yet
- Fluent Tutorial 1 - Fluid Flow and Heat Transfer in A Mixing ElbowDocument56 pagesFluent Tutorial 1 - Fluid Flow and Heat Transfer in A Mixing Elbowklausosho100% (1)
- MT 1 SolDocument4 pagesMT 1 SolSerdar BilgeNo ratings yet
- Fluent 13.0 Workshop02-Airfoil PDFDocument67 pagesFluent 13.0 Workshop02-Airfoil PDFSerdar BilgeNo ratings yet
- Estimation of Wing Loading and Thrust Loading (Lectures 9 To 18)Document15 pagesEstimation of Wing Loading and Thrust Loading (Lectures 9 To 18)Serdar BilgeNo ratings yet
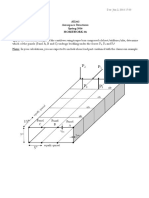
- Ae362 - 2006 - hw1 Aerospace StructureDocument1 pageAe362 - 2006 - hw1 Aerospace StructureSerdar BilgeNo ratings yet
- Lecture 12: Solutions For Equations With Constants Coefficients (Ii)Document5 pagesLecture 12: Solutions For Equations With Constants Coefficients (Ii)Serdar BilgeNo ratings yet
- Mechanical Intro 14.5 L02 BasicsDocument42 pagesMechanical Intro 14.5 L02 BasicsChandreshNo ratings yet
- HW03 Aerospace StructureDocument2 pagesHW03 Aerospace StructureSerdar BilgeNo ratings yet
- Fluent 13.0 Workshop02-Airfoil PDFDocument67 pagesFluent 13.0 Workshop02-Airfoil PDFSerdar BilgeNo ratings yet
- Lecture 12: Solutions For Equations With Constants Coefficients (Ii)Document5 pagesLecture 12: Solutions For Equations With Constants Coefficients (Ii)Serdar BilgeNo ratings yet
- Hw4 - 2016 Flight MechanicsDocument2 pagesHw4 - 2016 Flight MechanicsSerdar BilgeNo ratings yet
- HW05 Aerospace StructureDocument2 pagesHW05 Aerospace StructureSerdar BilgeNo ratings yet
- CAETraining (Fluid)Document129 pagesCAETraining (Fluid)andysarmientoNo ratings yet
- hw2 PDFDocument2 pageshw2 PDFSerdar BilgeNo ratings yet
- HW06 Aerospace StructureDocument1 pageHW06 Aerospace StructureSerdar BilgeNo ratings yet
- HW04 Aerospace StructureDocument2 pagesHW04 Aerospace StructureSerdar BilgeNo ratings yet
- Hw3 - 2016 Flight MechanicsDocument2 pagesHw3 - 2016 Flight MechanicsSerdar BilgeNo ratings yet
- HW02 Aerospace StructureDocument2 pagesHW02 Aerospace StructureSerdar BilgeNo ratings yet
- Hw2 - 2016 Flight MechanicsDocument2 pagesHw2 - 2016 Flight MechanicsSerdar BilgeNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Complex Algebra and The Complex PlaneDocument25 pagesComplex Algebra and The Complex Planevic12340590% (1)
- Mathematical Proofs A Transition To Advanced Mathematics 3rd Edition Chartrand Solutions Manual DownloadDocument21 pagesMathematical Proofs A Transition To Advanced Mathematics 3rd Edition Chartrand Solutions Manual DownloadLouie Seaman100% (26)
- Fourth Periodical Test in Math 10 2019 2020Document5 pagesFourth Periodical Test in Math 10 2019 2020Jaycelyn Magboo BritaniaNo ratings yet
- خواص الاكسبونشلDocument13 pagesخواص الاكسبونشلzeekoNo ratings yet
- Chapter 1.1 - 1.8 QuizDocument2 pagesChapter 1.1 - 1.8 Quizspeterlee6253No ratings yet
- B.tech Jntua R15Document159 pagesB.tech Jntua R15Sai TejaNo ratings yet
- VC.11: 3D Flow Along LiteracyDocument9 pagesVC.11: 3D Flow Along LiteracySri RaghavanNo ratings yet
- Walnut Hill School For The Arts Math Algebra 1 Placement TestDocument6 pagesWalnut Hill School For The Arts Math Algebra 1 Placement TestSUNGMIN CHOINo ratings yet
- Weighted and Multi-Valued Automata: Comparison and Transfer of IdeasDocument25 pagesWeighted and Multi-Valued Automata: Comparison and Transfer of IdeasMiroslav ĆirićNo ratings yet
- Modeling With AlgebraDocument4 pagesModeling With AlgebrapeueetNo ratings yet
- Due Date October 9th, 2019 at 3:00 PM Through D2L: 6 /5 On (, 2 ) (1 Mark) (1 Mark)Document4 pagesDue Date October 9th, 2019 at 3:00 PM Through D2L: 6 /5 On (, 2 ) (1 Mark) (1 Mark)Khoi Le0% (1)
- 15MA101calculus and Solid GeometryDocument4 pages15MA101calculus and Solid GeometryJgk Kumar0% (1)
- Identifying The Thue-Morse SequenceDocument14 pagesIdentifying The Thue-Morse SequenceJoel Reyes NocheNo ratings yet
- Stochastic Processes PracticalsDocument36 pagesStochastic Processes PracticalsVicky GuptaNo ratings yet
- Minimum Study Material For Grade 12Document4 pagesMinimum Study Material For Grade 12Sameer AhmedNo ratings yet
- 6 Mirror MatricesDocument9 pages6 Mirror MatricesIgor GjorgjievNo ratings yet
- Greedy Approximation-Cambridge University Press (2011) Vladimir TemlyakovDocument434 pagesGreedy Approximation-Cambridge University Press (2011) Vladimir TemlyakovOmonda Nii100% (1)
- Trivial Random VariablesDocument9 pagesTrivial Random VariablesPigafettaNo ratings yet
- Second Order Method: Newton Method Quasi Newton MethodDocument11 pagesSecond Order Method: Newton Method Quasi Newton Methodindah_yantiNo ratings yet
- Collins - Pure Mathematics 1 - Worked Solutions ManualDocument114 pagesCollins - Pure Mathematics 1 - Worked Solutions Manual최서영No ratings yet
- MA 510 Vector Calculus Assignment SheetDocument6 pagesMA 510 Vector Calculus Assignment Sheettinkertinker1435No ratings yet
- Categories For The Working Mathematician: Saunders Mac LaneDocument5 pagesCategories For The Working Mathematician: Saunders Mac LaneFakeaNo ratings yet
- Triaxial Stress State: (+ve Sense Shown)Document18 pagesTriaxial Stress State: (+ve Sense Shown)sqaiba_gNo ratings yet
- Moment and CoupleDocument18 pagesMoment and CouplejaganathanbeNo ratings yet
- Factoring Polynomials-Grade 8 Mathematics Module Week 1Document11 pagesFactoring Polynomials-Grade 8 Mathematics Module Week 1Atasha GabucanNo ratings yet
- Digital Logic Fundamentals SimplifiedDocument9 pagesDigital Logic Fundamentals SimplifiedRebecca JeyavadhanamNo ratings yet
- Answer-Sheet GEN MATHDocument5 pagesAnswer-Sheet GEN MATHJoesil Dianne SempronNo ratings yet
- Writing in Math: Divine Word College of Legazpi Junior High School Department Legazpi CityDocument3 pagesWriting in Math: Divine Word College of Legazpi Junior High School Department Legazpi CityB E L ANo ratings yet
- Math exam questions and answersDocument6 pagesMath exam questions and answersCarmina Cunanan100% (2)
- Chapter - 3 - The Z-Transform and Its Application To The Analysis of L TI SystemsDocument24 pagesChapter - 3 - The Z-Transform and Its Application To The Analysis of L TI SystemsYasir A. Al-ShataifNo ratings yet