You might also like
- Converting Random Vibration Specs to Freq-ASD PointsDocument3 pagesConverting Random Vibration Specs to Freq-ASD PointsrenatobellarosaNo ratings yet
- Fastened Joint Analysis and Test Correlation of The MLA Beam ExpanderDocument17 pagesFastened Joint Analysis and Test Correlation of The MLA Beam ExpanderBoby AlexanderNo ratings yet
- Datasheet Septa 31 RuagDocument7 pagesDatasheet Septa 31 RuagPatosanNo ratings yet
- CohesiveZoneModels PDFDocument31 pagesCohesiveZoneModels PDFGopal KondaguntaNo ratings yet
- Nastran 2016 Doc Release PDFDocument207 pagesNastran 2016 Doc Release PDFAtul WadhiNo ratings yet
- Bond-Slip Model For Detailed Finite-Element AnalysisDocument10 pagesBond-Slip Model For Detailed Finite-Element AnalysisSilver rayleighNo ratings yet
- Modal Space - in Our Own Little World: by Pete AvitabileDocument2 pagesModal Space - in Our Own Little World: by Pete AvitabileVignesh SelvarajNo ratings yet
- PVEfea Assembly AnalysisDocument20 pagesPVEfea Assembly AnalysisAnandh PsNo ratings yet
- Subroutine For Cohesive ElementDocument41 pagesSubroutine For Cohesive ElementBhushanRaj100% (1)
- 2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFDocument12 pages2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFvlad lupasteanuNo ratings yet
- User Subroutines SummaryDocument12 pagesUser Subroutines SummaryHara Palleti0% (1)
- Aiaa 2006 4718Document16 pagesAiaa 2006 4718haddanNo ratings yet
- FEA Report PDFDocument24 pagesFEA Report PDFDanish JavedNo ratings yet
- Major Project ShredderDocument12 pagesMajor Project Shredderaman kumarNo ratings yet
- Johnson-Cook Empirical ModelsDocument14 pagesJohnson-Cook Empirical ModelsSanaan Khan95% (21)
- An Empirical Equation Relating Fatigue Limit and Mean Stress - NASA PDFDocument31 pagesAn Empirical Equation Relating Fatigue Limit and Mean Stress - NASA PDFjohnyboyNo ratings yet
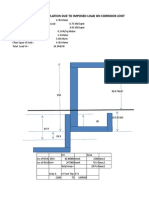
- Deflection Calculation Due To Imposed Load On Corridor JoistDocument14 pagesDeflection Calculation Due To Imposed Load On Corridor JoistranjitNo ratings yet
- Convolution and Signal Processing FundamentalsDocument22 pagesConvolution and Signal Processing Fundamentals174A1 HindupriyaNo ratings yet
- Modal PrestressedDocument5 pagesModal PrestressedNemoneverNo ratings yet
- Hart Smith Elastic PlasticDocument11 pagesHart Smith Elastic PlasticRonaldor DogbeNo ratings yet
- Fatigue PolymersDocument1 pageFatigue PolymersglihkrNo ratings yet
- MESYS Shaft Calculation GuideDocument28 pagesMESYS Shaft Calculation GuideZoebairNo ratings yet
- GIOVE-B Satellite & Payload OverviewDocument9 pagesGIOVE-B Satellite & Payload OverviewN467RX100% (1)
- Strength of LugDocument8 pagesStrength of LugnareniviNo ratings yet
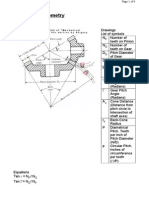
- Bevel GearDocument17 pagesBevel Gearparesh09No ratings yet
- Johnson Cook ModelDocument24 pagesJohnson Cook ModelNasr-eddine OudniNo ratings yet
- Antenna Pointing Mechanism Sales Brochure PDFDocument22 pagesAntenna Pointing Mechanism Sales Brochure PDFSantiago F.No ratings yet
- Bevel ExplanationDocument4 pagesBevel ExplanationVarun VaidyaNo ratings yet
- COMSOL Cohesive Zone DebondingDocument22 pagesCOMSOL Cohesive Zone DebondingAaqib AliNo ratings yet
- Design, Fabrication, and Testing of The Minotaur IV Large FairingDocument9 pagesDesign, Fabrication, and Testing of The Minotaur IV Large FairingVanina DuttoNo ratings yet
- Fatigue Life Analysis of RIMS (Using FEA)Document4 pagesFatigue Life Analysis of RIMS (Using FEA)raghavgmailNo ratings yet
- Thermal Ratcheting of A BeamDocument33 pagesThermal Ratcheting of A Beammilan44No ratings yet
- NASTRAN Modeling of Composite Bonded Joint DelaminationDocument13 pagesNASTRAN Modeling of Composite Bonded Joint DelaminationAmbalam NandhuNo ratings yet
- Damping DynaDocument15 pagesDamping DynasbhariNo ratings yet
- Damping SystemDocument6 pagesDamping SystemEro DoppleganggerNo ratings yet
- Terminal Report ShredderDocument25 pagesTerminal Report ShredderEnriv YasiladNo ratings yet
- Design-II, 2016 Bevel Gear Design ProcedureDocument1 pageDesign-II, 2016 Bevel Gear Design ProcedureenggsantuNo ratings yet
- Fea Project ReportDocument58 pagesFea Project ReportAvnish DubeyNo ratings yet
- Modal Analysis With Glued ContactDocument8 pagesModal Analysis With Glued ContactDan WolfNo ratings yet
- Fracture Project PresentationDocument16 pagesFracture Project Presentationdhillon_rsdNo ratings yet
- Stress Classification of Blind FlangeDocument13 pagesStress Classification of Blind FlangepajadhavNo ratings yet
- BMD SFDDocument3 pagesBMD SFDShrinath ShetNo ratings yet
- Design Load Calculation ResourceDocument63 pagesDesign Load Calculation Resourceruby-blackNo ratings yet
- Random Vibration in Patran and Classical ApproachDocument44 pagesRandom Vibration in Patran and Classical Approachபிரபாகரன் ஆறுமுகம்No ratings yet
- Inertia Relief: Workshop 17Document18 pagesInertia Relief: Workshop 17dionbesselinkNo ratings yet
- CHABOCHE, J. L. - Continuum Damage Mechanics P.2 - Damage Growth, Crack InitiationDocument8 pagesCHABOCHE, J. L. - Continuum Damage Mechanics P.2 - Damage Growth, Crack InitiationhasmonteiroNo ratings yet
- PADT ANSYS Random Vib Reaction Forces 2017 - 11 - 22 1Document31 pagesPADT ANSYS Random Vib Reaction Forces 2017 - 11 - 22 1Ajith KumarNo ratings yet
- Biaxial cyclic deformation behaviour of steelsDocument14 pagesBiaxial cyclic deformation behaviour of steelsDavid C Houser100% (1)
- Pressure Vessel Inspection ReportDocument33 pagesPressure Vessel Inspection ReportJinlong SuNo ratings yet
- A Material Model For Flexural Crack Simulation in Reinforced Concrete Elements Using AbaqusDocument5 pagesA Material Model For Flexural Crack Simulation in Reinforced Concrete Elements Using AbaqusBala SubramanianNo ratings yet
- MSC NASTRAN Patran Progressive Failure and Delam 021712Document53 pagesMSC NASTRAN Patran Progressive Failure and Delam 021712alitariq90No ratings yet
- Resistance and Deformation of Solid Media: Pergamon Unified Engineering SeriesFrom EverandResistance and Deformation of Solid Media: Pergamon Unified Engineering SeriesNo ratings yet
- Computational Fluid-Structure Interaction: Methods and ApplicationsFrom EverandComputational Fluid-Structure Interaction: Methods and ApplicationsNo ratings yet
- Nonlinear Finite Element Analysis and Adina: Proceedings of the 4th ADINA ConferenceFrom EverandNonlinear Finite Element Analysis and Adina: Proceedings of the 4th ADINA ConferenceNo ratings yet
- Equivalent Static Loads For Random VibrationDocument8 pagesEquivalent Static Loads For Random VibrationMezgeen DoskyNo ratings yet
- Eqstatic MDocument69 pagesEqstatic MRamchandraNo ratings yet
- " - Si, - P-Z: Convergence Criteria For Iterative ProcessesDocument2 pages" - Si, - P-Z: Convergence Criteria For Iterative ProcessesKtk ZadNo ratings yet
- HPC For Mechanical AnsysDocument33 pagesHPC For Mechanical Ansyssvk_ntNo ratings yet
- XV1020A MXP100iB PDFDocument8 pagesXV1020A MXP100iB PDFbreaker1999No ratings yet
- Debugging Tips For SolidWorks API Programmers - VBA PDFDocument18 pagesDebugging Tips For SolidWorks API Programmers - VBA PDFbreaker1999No ratings yet
- QuickGuideTo ANSYS v12.0Document19 pagesQuickGuideTo ANSYS v12.0breaker1999No ratings yet
- Gearless Transmission Project ReportDocument45 pagesGearless Transmission Project ReportAbhijeet MoreNo ratings yet
- S Mech & FDocument31 pagesS Mech & FVignesh RajendranNo ratings yet
- Grillage Analysis of Structures Consist of Steel I-BeamsDocument17 pagesGrillage Analysis of Structures Consist of Steel I-Beamsjust_u_prettyNo ratings yet
- Clipconn Bolt Weld 13Document42 pagesClipconn Bolt Weld 13Jay GalvanNo ratings yet
- UNIT 2 - PhysicsDocument38 pagesUNIT 2 - PhysicsPpx XdNo ratings yet
- Sec Module 03Document22 pagesSec Module 03kenji belanizo100% (1)
- Heat Transfer BookDocument2 pagesHeat Transfer BookPrashanth ChNo ratings yet
- Structural Dynamics Spring Mass SystemDocument57 pagesStructural Dynamics Spring Mass Systemrobliutpg.com.auNo ratings yet
- Response Spectrum - Is A Function of Frequency or Period, Showing The Peak ResponseDocument5 pagesResponse Spectrum - Is A Function of Frequency or Period, Showing The Peak Responserenzon272No ratings yet
- Are Tier Building Column SplicesDocument2 pagesAre Tier Building Column SplicesKarthi SriNo ratings yet
- Unit 2 - 16 MarkDocument35 pagesUnit 2 - 16 MarkAnonymous mXicTi8hBNo ratings yet
- Concrete Structure Design Conference AgendaDocument5 pagesConcrete Structure Design Conference AgendaSophia VarshiniNo ratings yet
- Chapter Four: Stresses, Strains and Elastic Deformations of SoilsDocument26 pagesChapter Four: Stresses, Strains and Elastic Deformations of SoilsKebede kasaNo ratings yet
- Mechanical systems examples thermal hydraulic pneumaticDocument8 pagesMechanical systems examples thermal hydraulic pneumaticAbdulrahmanNo ratings yet
- 2022NOV PSAD UnlockedDocument7 pages2022NOV PSAD UnlockedKristelle V. TorrealbaNo ratings yet
- Laminar Flow Through Circular PipesDocument26 pagesLaminar Flow Through Circular PipesSunil BagadeNo ratings yet
- Rotary Inverted PendulumDocument8 pagesRotary Inverted PendulumEduardo BittencourtNo ratings yet
- Continuous Mixing Advantages and Equipment Selection in Industrial Pharmacy LecturesDocument16 pagesContinuous Mixing Advantages and Equipment Selection in Industrial Pharmacy Lecturesali alasdyNo ratings yet
- Angular Motion and Simple Harmonic Motion ConceptsDocument48 pagesAngular Motion and Simple Harmonic Motion ConceptsAna Hidayah Syuhada100% (1)
- Phy231sp06 Exam3 PracticeDocument8 pagesPhy231sp06 Exam3 PracticeJunsuk AhnNo ratings yet
- 8-Incompressible Viscous FlowsDocument21 pages8-Incompressible Viscous FlowsmkkNo ratings yet
- Lehmann 1936 Extracts+interpretationDocument6 pagesLehmann 1936 Extracts+interpretationKomar UdinNo ratings yet
- Shake PDFDocument15 pagesShake PDFGabriel EvanNo ratings yet
- Motion and Force MDCAT QuestionsDocument3 pagesMotion and Force MDCAT Questionsbilalazam31No ratings yet
- 1.2 Beams and Columns: Chapter 1-Static Engineering SystemsDocument13 pages1.2 Beams and Columns: Chapter 1-Static Engineering SystemsGia BeNo ratings yet
- Experiment No. 7 Heat LossesDocument23 pagesExperiment No. 7 Heat LossesAli Requiso MahmudNo ratings yet
- ARIHANT AP Eamcet Chapterwise PYQs (Physics)Document279 pagesARIHANT AP Eamcet Chapterwise PYQs (Physics)yogendrareddy01880% (10)
- HW 6 PDFDocument4 pagesHW 6 PDFAjinkya DeshpandeNo ratings yet
- Simulation and Vibration Analysis of Shaft CracksDocument7 pagesSimulation and Vibration Analysis of Shaft CracksTravis SkinnerNo ratings yet