You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Report - Roche Pharmaceuticals LTD (Human Resource Planning & Development) 222Document23 pagesReport - Roche Pharmaceuticals LTD (Human Resource Planning & Development) 222jawwadraja100% (1)
- Sharp Service Manual Models Lc-40sh340k and Lc-40sh340e With Chassis 17mb60Document106 pagesSharp Service Manual Models Lc-40sh340k and Lc-40sh340e With Chassis 17mb60murtibing100% (1)
- 01-Toy Product DesignDocument54 pages01-Toy Product DesignJuanNo ratings yet
- Crystal Gallery: AccountabilityDocument15 pagesCrystal Gallery: AccountabilityJitesh ManwaniNo ratings yet
- Lesson PlanDocument11 pagesLesson PlanKim Gabrielle Del PuertoNo ratings yet
- Simulation & Role PlayDocument10 pagesSimulation & Role Playpreeti sharma100% (2)
- Designing Research TopicDocument19 pagesDesigning Research TopicMark Padin VillaplazaNo ratings yet
- Competitive Analysis: Features: Smart IrrigationDocument2 pagesCompetitive Analysis: Features: Smart IrrigationRoseanne RamonNo ratings yet
- Examples and Non-ExamplesDocument5 pagesExamples and Non-ExamplesslidegaeNo ratings yet
- Option MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)Document4 pagesOption MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)MukulNo ratings yet
- APAVE Tiger CP - UK - FINAL2Document1 pageAPAVE Tiger CP - UK - FINAL2AdrewhassTechnicaNo ratings yet
- CBSE Class 6 - MCQ Separation of SubstancesDocument4 pagesCBSE Class 6 - MCQ Separation of Substancesvinod1577100% (1)
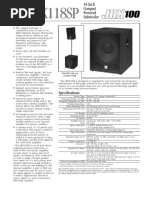
- JRX118SP SpecsheetDocument2 pagesJRX118SP SpecsheetLuisNo ratings yet
- Pakistan Wapda - Power Wing: Standard Operating ProceduresDocument8 pagesPakistan Wapda - Power Wing: Standard Operating Procedureszahra batoolNo ratings yet
- 08 Saad Introduction Too o ConceptsDocument26 pages08 Saad Introduction Too o ConceptsMohammed ABDO ALBAOMNo ratings yet
- Thesis StoryboardDocument5 pagesThesis StoryboardJill Brown100% (2)
- Probability spaces and σ-algebras: Scott SheffieldDocument12 pagesProbability spaces and σ-algebras: Scott SheffieldRikta DasNo ratings yet
- GS at CPP HuyHoang CodeDocument285 pagesGS at CPP HuyHoang CodeTran Bach DangNo ratings yet
- AYLS Annual Report 2019 LampDocument136 pagesAYLS Annual Report 2019 LampHigh FourNo ratings yet
- Amiel Houser - LévinasDocument8 pagesAmiel Houser - Lévinaschristyh3No ratings yet
- When A Transformer Has Stomach Pain and Wants ToDocument4 pagesWhen A Transformer Has Stomach Pain and Wants ToRobert GalarzaNo ratings yet
- Urban Problems and SolutionsDocument12 pagesUrban Problems and SolutionsJohn Lloyd Agapito50% (2)
- Ass AsDocument2 pagesAss AsMukesh BishtNo ratings yet
- Laws of ThermoDocument13 pagesLaws of ThermofabyunaaaNo ratings yet
- Staffing ProcessDocument18 pagesStaffing ProcessEbtesam EliasNo ratings yet
- Antennas L01Document15 pagesAntennas L01Domenico RizzoNo ratings yet
- 1-Perceived Threat of Covid-19 and T.I (Reference Article)Document10 pages1-Perceived Threat of Covid-19 and T.I (Reference Article)Hassan NadeemNo ratings yet
- FLIGHT Punta Arenas - SantiagoDocument3 pagesFLIGHT Punta Arenas - SantiagoАртем ПичугинNo ratings yet
- Dakshin Dinajpur TP ListDocument5 pagesDakshin Dinajpur TP ListDeb D Creative StudioNo ratings yet