You might also like
- The LabVIEW Simulation of Space-Time Coding Technique in The MIMO-OfDM SystemDocument6 pagesThe LabVIEW Simulation of Space-Time Coding Technique in The MIMO-OfDM Systemivy_publisherNo ratings yet
- DVB-T2 Options of ETL PublicDocument50 pagesDVB-T2 Options of ETL PublicPuput Adi SaputroNo ratings yet
- Design and Analysis of Microstrip Antenna...Document73 pagesDesign and Analysis of Microstrip Antenna...Mirela CimpanuNo ratings yet
- Lectrure 5.microstrip AntennasDocument57 pagesLectrure 5.microstrip AntennasSśēmǾǿ Ŕämáďañ100% (1)
- Sony Ta Fb920rDocument26 pagesSony Ta Fb920rGeorge Ion ȘușalăNo ratings yet
- VSAT TechnologyDocument4 pagesVSAT TechnologyFahad IsmailNo ratings yet
- Measurements On RF Radio Tuners With Audio Analyzer R&S UPL and Signal Generator R&S SML With Option - B5Document24 pagesMeasurements On RF Radio Tuners With Audio Analyzer R&S UPL and Signal Generator R&S SML With Option - B5andym13No ratings yet
- Radio PropagationDocument44 pagesRadio PropagationraedapuNo ratings yet
- JOTRON TRON UAIS TR-2500 - Operation - Installation ManualDocument77 pagesJOTRON TRON UAIS TR-2500 - Operation - Installation ManualcostinosNo ratings yet
- Labview Based RCS Measurement SystemDocument28 pagesLabview Based RCS Measurement SystemGöksenin BozdağNo ratings yet
- Simulation of A Rectangular Patch AntennaDocument9 pagesSimulation of A Rectangular Patch AntennaragvshahNo ratings yet
- Aircom Microwave Link PlanningDocument192 pagesAircom Microwave Link PlanningEmerson ValadãoNo ratings yet
- IC-M401EURO - Service ManualDocument36 pagesIC-M401EURO - Service ManuallockhimupasapNo ratings yet
- 1Document2 pages1Dragoș Dragnea0% (1)
- Modulation Techniques and DemodulationDocument59 pagesModulation Techniques and DemodulationMahmoud ElbaroudyNo ratings yet
- TT-3670A IP Handset ManualDocument152 pagesTT-3670A IP Handset ManualradamNo ratings yet
- MW Communication System in UMTS NetworksDocument84 pagesMW Communication System in UMTS NetworksshripalNo ratings yet
- Comparative Study of Microstrip Patch Antenna For Microstrip Feed Line and Different Substrate PDFDocument4 pagesComparative Study of Microstrip Patch Antenna For Microstrip Feed Line and Different Substrate PDFcuonglanchiNo ratings yet
- Service Manual VX 21002200 Series VHFDocument44 pagesService Manual VX 21002200 Series VHFRubem A S FigueiraNo ratings yet
- Understanding Digital TV MERDocument73 pagesUnderstanding Digital TV MERTin LeNo ratings yet
- Antenna Performance Influenced by The Finite Extent and Conductivity of Ground Planes A Collection of Reprints by J. R. Wait, Et Al, 1990.Document269 pagesAntenna Performance Influenced by The Finite Extent and Conductivity of Ground Planes A Collection of Reprints by J. R. Wait, Et Al, 1990.Bob Laughlin, KWØRL100% (1)
- Aq7220 Mini OtdrDocument278 pagesAq7220 Mini Otdrkkara649No ratings yet
- Operator's Manual for Radio Sets AN/PRC-74B and AN/PRC-74CDocument96 pagesOperator's Manual for Radio Sets AN/PRC-74B and AN/PRC-74CCarl RussellNo ratings yet
- Tutorial1 Sol 180102Document9 pagesTutorial1 Sol 180102Punky HeroNo ratings yet
- What Is The Function of SDCCHDocument12 pagesWhat Is The Function of SDCCHjabi_shaik_1No ratings yet
- Debeg 3400Document8 pagesDebeg 3400dsumicNo ratings yet
- SDR Link Budget PDFDocument49 pagesSDR Link Budget PDFSalah SalahNo ratings yet
- 1 5 Analog To Digital Voice EncodingDocument10 pages1 5 Analog To Digital Voice EncodingDương Thế CườngNo ratings yet
- 8.design of An S-Band Rectangular Microstrip Patch AntennaDocument8 pages8.design of An S-Band Rectangular Microstrip Patch Antennasrinivas08427No ratings yet
- Channel Estimation Techniques for OFDM SystemsDocument31 pagesChannel Estimation Techniques for OFDM SystemsvgguhaNo ratings yet
- Scancomm 2.2 Skanti: Radiotelex System For GMDSSDocument54 pagesScancomm 2.2 Skanti: Radiotelex System For GMDSSAndaç ÖzkanNo ratings yet
- Transmisor HarrisDocument195 pagesTransmisor HarrisJose Juan Gutierrez Sanchez100% (1)
- Rectangular Patch AntennaDocument81 pagesRectangular Patch AntennaSulaim King X100% (2)
- Design and Construction of A Quadrifilar Helix Antenna For Receiving NOAA Satellites 1Document6 pagesDesign and Construction of A Quadrifilar Helix Antenna For Receiving NOAA Satellites 1Luis MartinezNo ratings yet
- SMR 715720InstructionEn 1Document192 pagesSMR 715720InstructionEn 1Omar BottarroNo ratings yet
- F5121D Service ManualDocument40 pagesF5121D Service ManualMarcelo LilloNo ratings yet
- DEIF Wind Measuring SystemDocument4 pagesDEIF Wind Measuring Systemzlovic6806160% (1)
- Dual Band Transceiver: S-15120XZ-C1 March 2015Document55 pagesDual Band Transceiver: S-15120XZ-C1 March 2015wahyunugieNo ratings yet
- EMI-Shield Installation InstructionsDocument10 pagesEMI-Shield Installation InstructionsSayedur RahmanNo ratings yet
- RF Interference Hunting TechniquesDocument20 pagesRF Interference Hunting TechniqueszillionNo ratings yet
- JOtron tr-2500 PDFDocument77 pagesJOtron tr-2500 PDFMarco DelvalleNo ratings yet
- CSR-CSFT438 Product Description and User's Manual Rev F 20-JUNE-2011Document62 pagesCSR-CSFT438 Product Description and User's Manual Rev F 20-JUNE-2011معاذ أحمدNo ratings yet
- Radar Systems - Duplexers - TutorialspointDocument4 pagesRadar Systems - Duplexers - Tutorialspointgajjala rakeshNo ratings yet
- Slot Antenna: A Radiator Made By Cutting A SlotDocument9 pagesSlot Antenna: A Radiator Made By Cutting A SlotMarcos Marcelon Alcantara Abueva IIINo ratings yet
- Superheterodyne TransmitterDocument3 pagesSuperheterodyne TransmitterKirz SerranoNo ratings yet
- TM SAM MF-HF 5000 Series 150&250W 98 124351Document60 pagesTM SAM MF-HF 5000 Series 150&250W 98 124351citaccitacNo ratings yet
- VSAT Installation Tutorial and InformationDocument4 pagesVSAT Installation Tutorial and InformationMukesh YadavNo ratings yet
- Product Catalogue: BarrettDocument70 pagesProduct Catalogue: BarrettDavyAvicenne100% (1)
- Key Antenna Parameters Explained in DetailDocument28 pagesKey Antenna Parameters Explained in Detailsree2728100% (1)
- Design and Simulation of Magic Tee and Ring Hybrid Coupler Using Ansoft HFSSDocument5 pagesDesign and Simulation of Magic Tee and Ring Hybrid Coupler Using Ansoft HFSSkaranNo ratings yet
- Yaesu Vertex VXR-5000 VHF Service ManualDocument136 pagesYaesu Vertex VXR-5000 VHF Service ManualIWNo ratings yet
- Service Manual: Survival Craft 2-Way RadioDocument34 pagesService Manual: Survival Craft 2-Way RadioAlexNo ratings yet
- PCM PDH and SDHDocument58 pagesPCM PDH and SDHAkram Ba-odhanNo ratings yet
- Week 9 Helical Antenna FinalDocument31 pagesWeek 9 Helical Antenna Finalhaha2012No ratings yet
- Digital Excitation Systems Communication ManualDocument11 pagesDigital Excitation Systems Communication ManualSagar TamhankarNo ratings yet
- Harmony Radio, R2.8: Hardware Installation GuideDocument157 pagesHarmony Radio, R2.8: Hardware Installation GuideСергій ХрущовNo ratings yet
- Allgon Microwave Radio - Installation Manual - WLDM001BDocument92 pagesAllgon Microwave Radio - Installation Manual - WLDM001BVirgil PeiulescuNo ratings yet
- HC 4500 250wDocument4 pagesHC 4500 250wcetzacoNo ratings yet
- VOR Part2 TextDocument178 pagesVOR Part2 Textcmge_2005No ratings yet
- A Survey On 5G Multi-Carrier Waveforms - Evaluation and Comparison For Diversified Application Scenarios and Service TypesDocument11 pagesA Survey On 5G Multi-Carrier Waveforms - Evaluation and Comparison For Diversified Application Scenarios and Service TypesJournal of TelecommunicationsNo ratings yet
- System Model of TH-UWB Using LDPC Code ImplementationDocument7 pagesSystem Model of TH-UWB Using LDPC Code ImplementationJournal of TelecommunicationsNo ratings yet
- Blackhole Attack Effect Elimination in VANET Networks Using IDS-AODV, RAODV and AntNet AlgorithmDocument5 pagesBlackhole Attack Effect Elimination in VANET Networks Using IDS-AODV, RAODV and AntNet AlgorithmJournal of TelecommunicationsNo ratings yet
- Optimization of Smart Grid Communication Network in A Het-Net Environment Using A Cost FunctionDocument8 pagesOptimization of Smart Grid Communication Network in A Het-Net Environment Using A Cost FunctionJournal of TelecommunicationsNo ratings yet
- Patient Monitoring Using Bluetooth and Wireless LAN: A ReviewDocument6 pagesPatient Monitoring Using Bluetooth and Wireless LAN: A ReviewJournal of TelecommunicationsNo ratings yet
- Performance Enhancement of VANET Routing ProtocolsDocument6 pagesPerformance Enhancement of VANET Routing ProtocolsJournal of TelecommunicationsNo ratings yet
- DMVPN (Dynamic Multipoint VPN) : A Solution For Interconnection of Sites IPv6 Over An IPv4 Transport NetworkDocument6 pagesDMVPN (Dynamic Multipoint VPN) : A Solution For Interconnection of Sites IPv6 Over An IPv4 Transport NetworkJournal of TelecommunicationsNo ratings yet
- 4G or 3G, Does It Signify An Improvement in Telecommunication Technology in Cameroon?Document13 pages4G or 3G, Does It Signify An Improvement in Telecommunication Technology in Cameroon?Journal of Telecommunications100% (2)
- Reflectionless Filters With Arbitrary Transfer FunctionsDocument3 pagesReflectionless Filters With Arbitrary Transfer FunctionsJournal of Telecommunications100% (1)
- Controlled Sink Mobility For Efficient Design of A Wireless Sensor NetworkDocument4 pagesControlled Sink Mobility For Efficient Design of A Wireless Sensor NetworkJournal of TelecommunicationsNo ratings yet
- Optimal Pilot Matrix Design For Training - Based Channel Estimation in MIMO CommunicationsDocument7 pagesOptimal Pilot Matrix Design For Training - Based Channel Estimation in MIMO CommunicationsJournal of TelecommunicationsNo ratings yet
- Programming Considerations For The Design of Token Ludo Game Using Petri NetsDocument5 pagesProgramming Considerations For The Design of Token Ludo Game Using Petri NetsJournal of TelecommunicationsNo ratings yet
- Secured and Efficient Transmission of Wireless Information Depending On Frequency Hopping System With 63 ChannelsDocument4 pagesSecured and Efficient Transmission of Wireless Information Depending On Frequency Hopping System With 63 ChannelsJournal of TelecommunicationsNo ratings yet
- Implementation Scenarios For An Adaptable LTE Turbo Decoder Based On BLERDocument8 pagesImplementation Scenarios For An Adaptable LTE Turbo Decoder Based On BLERJournal of TelecommunicationsNo ratings yet
- Analysis of Spurious RF Signal Caused by Retardation in Optical Two-Tone Signal Generator Utilizing Polarisation ManipulationDocument4 pagesAnalysis of Spurious RF Signal Caused by Retardation in Optical Two-Tone Signal Generator Utilizing Polarisation ManipulationJournal of TelecommunicationsNo ratings yet
- Micro Controller Based Remote Sensing and Controlling Using Cellular NetworkDocument7 pagesMicro Controller Based Remote Sensing and Controlling Using Cellular NetworkJournal of TelecommunicationsNo ratings yet
- Development of A Sign Language Tutoring System For People With Hearing DisabilityDocument5 pagesDevelopment of A Sign Language Tutoring System For People With Hearing DisabilityJournal of TelecommunicationsNo ratings yet
- Applying Optimum Combining To A DS/CDMA Code Diversity SystemDocument7 pagesApplying Optimum Combining To A DS/CDMA Code Diversity SystemJournal of TelecommunicationsNo ratings yet
- Simulation of A Communication System Using Verilog LanguageDocument13 pagesSimulation of A Communication System Using Verilog LanguageJournal of TelecommunicationsNo ratings yet
- Optimization of Passive FTTH Network Design Using Vertical Micro DuctingDocument4 pagesOptimization of Passive FTTH Network Design Using Vertical Micro DuctingJournal of TelecommunicationsNo ratings yet
- QoT Aware Dynamic Routing and Wavelength Assignment Technique Using Fuzzy Logic Controller in WDM NetworksDocument10 pagesQoT Aware Dynamic Routing and Wavelength Assignment Technique Using Fuzzy Logic Controller in WDM NetworksJournal of TelecommunicationsNo ratings yet
- Study of UWB On-Body Radio Channel For Ectomorph, Mesomorph, and Endomorph Body TypesDocument5 pagesStudy of UWB On-Body Radio Channel For Ectomorph, Mesomorph, and Endomorph Body TypesJournal of TelecommunicationsNo ratings yet
- Automated Teaching Step-by-Step The Operations of TCP/IP Model (A-Step-TPC/IP)Document6 pagesAutomated Teaching Step-by-Step The Operations of TCP/IP Model (A-Step-TPC/IP)Journal of TelecommunicationsNo ratings yet
- Error Correction Scheme For Wireless Sensor NetworksDocument8 pagesError Correction Scheme For Wireless Sensor NetworksJournal of TelecommunicationsNo ratings yet
- Learning An Online Control Experiment Platform Using Labview SoftwareDocument6 pagesLearning An Online Control Experiment Platform Using Labview SoftwareJournal of TelecommunicationsNo ratings yet
- Rural Area Development and Society Performance Improvement in GhanaDocument6 pagesRural Area Development and Society Performance Improvement in GhanaJournal of TelecommunicationsNo ratings yet
- Improving The Performance of DWDM Free Space Optics System Under Worst Weather ConditionsDocument5 pagesImproving The Performance of DWDM Free Space Optics System Under Worst Weather ConditionsJournal of Telecommunications100% (2)
- Distributor Installation: Crankshaft Position Sensor RemovalDocument2 pagesDistributor Installation: Crankshaft Position Sensor RemovalKeyboardMan1960No ratings yet
- Awp Serv Embedded 7-0-50 RLDocument12 pagesAwp Serv Embedded 7-0-50 RLOscar Alberto ZambranoNo ratings yet
- Vishwakarma Institute E&TC curriculumDocument37 pagesVishwakarma Institute E&TC curriculumAbhijeet KadamNo ratings yet
- Feedbacks Re Online Appointment System of MECODocument2 pagesFeedbacks Re Online Appointment System of MECORic SaysonNo ratings yet
- Polarity Test of TransformerDocument3 pagesPolarity Test of TransformerdebarshiNo ratings yet
- Samsung CS29A5HT8XBWT PDFDocument53 pagesSamsung CS29A5HT8XBWT PDFHootOwl IDNo ratings yet
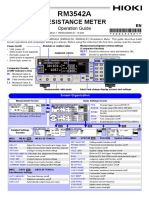
- Resistance Meter: Operation GuideDocument2 pagesResistance Meter: Operation GuideEko SutjiptoNo ratings yet
- 99acres.comDocument11 pages99acres.comHassan ZiaNo ratings yet
- Dot 63553 DS1Document66 pagesDot 63553 DS1dfsdfNo ratings yet
- Es100 114 Zise20Document48 pagesEs100 114 Zise20Matias CzarnotaNo ratings yet
- 08 - Installation and Maintenance of Health IT Systems - Unit 9 - Creating Fault-Tolerant Systems, Backups, and Decommissioning - Lecture CDocument15 pages08 - Installation and Maintenance of Health IT Systems - Unit 9 - Creating Fault-Tolerant Systems, Backups, and Decommissioning - Lecture CHealth IT Workforce Curriculum - 2012No ratings yet
- Subhajit Sen ResumeDocument2 pagesSubhajit Sen ResumeSubhajit SenNo ratings yet
- Erp KPL Jul16Document192 pagesErp KPL Jul16sriiyer85No ratings yet
- REVO-II & REVO-E ComparisionDocument3 pagesREVO-II & REVO-E ComparisionPaul Abi najemNo ratings yet
- Croatian Mobility Startup Greyp Bikes Raises FundsDocument18 pagesCroatian Mobility Startup Greyp Bikes Raises FundsDrazenMarjanovicNo ratings yet
- Ooad4 5Document91 pagesOoad4 5B happyNo ratings yet
- How to Make a Bootable Windows 7 USB DriveDocument8 pagesHow to Make a Bootable Windows 7 USB DriveBG GopalNo ratings yet
- Preturi Octavia FL-ilovepdf-compressed-1Document18 pagesPreturi Octavia FL-ilovepdf-compressed-1Alin DanielNo ratings yet
- Spark 2000 Ul: Instruction ManualDocument65 pagesSpark 2000 Ul: Instruction ManualMárcio Fernandes0% (1)
- Syllabus - Ec E16 - Satellite Communication SystemsDocument2 pagesSyllabus - Ec E16 - Satellite Communication SystemsPRADEEP JNo ratings yet
- Testing Interview Questions: Automation Testing ExperienceDocument14 pagesTesting Interview Questions: Automation Testing ExperienceSuman kulliNo ratings yet
- Nagachethan - Test ManagerDocument1 pageNagachethan - Test ManagerNagachetan SPNo ratings yet
- MDS Report for PTFE TubeDocument3 pagesMDS Report for PTFE TubeyatheendravarmaNo ratings yet
- FRDM-KE06Z Quick Start Guide (Rev 1.0)Document9 pagesFRDM-KE06Z Quick Start Guide (Rev 1.0)BOLFRANo ratings yet
- Hirakud-Odisha: S.No Equipment Specification Qty (Nos) SpecificationDocument2 pagesHirakud-Odisha: S.No Equipment Specification Qty (Nos) SpecificationHytech Pvt. Ltd.No ratings yet
- Electronic Hand Control MH 2000Document3 pagesElectronic Hand Control MH 2000Christian ChumpitazNo ratings yet
- John Deere 7720 Parts CatalogDocument20 pagesJohn Deere 7720 Parts Catalogalejandro100% (38)
- SEM Workshop Presentation 3Document28 pagesSEM Workshop Presentation 3felixkern1991No ratings yet
- 115N Hartzell Propeller ManualDocument242 pages115N Hartzell Propeller Manualjponti100% (3)
- BioTeK Power Wave UserManualDocument176 pagesBioTeK Power Wave UserManualAFWNo ratings yet