You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Electrical - BB International PDFDocument480 pagesElectrical - BB International PDFedelmolina100% (3)
- Manage Risks and Seize OpportunitiesDocument5 pagesManage Risks and Seize Opportunitiesamyn_s100% (2)
- Oracle Fixed AssetsDocument39 pagesOracle Fixed AssetspallavipulluriNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- PIC For BeginnersDocument147 pagesPIC For Beginnersapi-3695801100% (44)
- Linde H16DDocument2 pagesLinde H16Dfox mulderNo ratings yet
- Civilian Products BaikalDocument51 pagesCivilian Products BaikalMUHAMMAD SAQIB LATIF CHAUDHARYNo ratings yet
- C 20 Series - Lubrication and Maintenance Schedule - 2010Document22 pagesC 20 Series - Lubrication and Maintenance Schedule - 2010Centrifugal SeparatorNo ratings yet
- Ecodial Advance Calcualtion IndiaDocument16 pagesEcodial Advance Calcualtion IndiaJosé Mendes da Silva100% (1)
- Simulation and Genetic Algorithms For Control Planning of Underwater Vehicle TrajectoriesDocument8 pagesSimulation and Genetic Algorithms For Control Planning of Underwater Vehicle TrajectoriesNaeem UllahNo ratings yet
- Project: Multiple Simple Pendulum Apparatus: Altaf Ur Rahman ToheedullahDocument1 pageProject: Multiple Simple Pendulum Apparatus: Altaf Ur Rahman ToheedullahNaeem UllahNo ratings yet
- 1Document8 pages1Mariano Hernandez B100% (1)
- Live Fast - Code Young - ADXL345 Accelerometer Breakout Board + Arduino and ProcessingDocument41 pagesLive Fast - Code Young - ADXL345 Accelerometer Breakout Board + Arduino and ProcessingNaeem Ullah100% (1)
- GSM InnovateDocument15 pagesGSM InnovateNaeem UllahNo ratings yet
- SIM900 ReviewDocument2 pagesSIM900 ReviewSlavko MitrovicNo ratings yet
- TIA PORTAL Step7 Basic ManualDocument12 pagesTIA PORTAL Step7 Basic ManualBboyJeanko MarichalesNo ratings yet
- Project 2 Excess 2Document2 pagesProject 2 Excess 2Naeem UllahNo ratings yet
- Line Follower ATMEGA16 WWW - Robotechno.usDocument17 pagesLine Follower ATMEGA16 WWW - Robotechno.usSarang WadekarNo ratings yet
- DP-10/DP-10T/DP-11/DP-15/DP-18 Digital Ultrasonic Diagnostic Imaging SystemDocument213 pagesDP-10/DP-10T/DP-11/DP-15/DP-18 Digital Ultrasonic Diagnostic Imaging SystemDaniel JuarezNo ratings yet
- J Control - DX 9100 Digital ControllerDocument104 pagesJ Control - DX 9100 Digital Controlleramhosny640% (1)
- My Dream in The Drawer English Bookdash FKB StoriesDocument19 pagesMy Dream in The Drawer English Bookdash FKB StoriesonkNo ratings yet
- Journal 1 - Laganzo, Escarez, TabilangonDocument35 pagesJournal 1 - Laganzo, Escarez, Tabilangoncloy aubreyNo ratings yet
- Guidelines For Quality Control Testing For Digital CR DR Mammography V4Document62 pagesGuidelines For Quality Control Testing For Digital CR DR Mammography V4khaerul0% (1)
- Fpga Implementation of Ofdm Modem: Asst. Prof, Department of ECE, DBIT, Mysore Road, Bangalore-560074Document6 pagesFpga Implementation of Ofdm Modem: Asst. Prof, Department of ECE, DBIT, Mysore Road, Bangalore-560074lambanaveenNo ratings yet
- Nikola Tesla PaperDocument6 pagesNikola Tesla Paperapi-302403539No ratings yet
- Vibration PPV EstimationDocument8 pagesVibration PPV EstimationJensen TanNo ratings yet
- MeasurementDocument65 pagesMeasurementChandreshDharDubeyNo ratings yet
- Building A Two Wheeled Balancing RobotDocument120 pagesBuilding A Two Wheeled Balancing RobotCp Em PheeradorNo ratings yet
- Thyristor Controlled Reactor: Circuit DiagramDocument4 pagesThyristor Controlled Reactor: Circuit DiagramSpk SudhinNo ratings yet
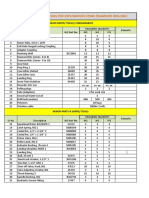
- Minimum drilling supplies stockDocument3 pagesMinimum drilling supplies stockAsif KhanzadaNo ratings yet
- Physics Sample ProblemsDocument5 pagesPhysics Sample ProblemsEdin Abolencia0% (1)
- CoreLine LED Brochure 2013Document20 pagesCoreLine LED Brochure 2013Dragan VuckovicNo ratings yet
- AART To Revitalize Aarhus Port District With TerracedDocument4 pagesAART To Revitalize Aarhus Port District With TerracedaditamatyasNo ratings yet
- JMeter OAuth SamplerDocument3 pagesJMeter OAuth SamplerFredy NataNo ratings yet
- EX 9 CompositesDocument2 pagesEX 9 CompositesRenae SavannahNo ratings yet
- CamlabDocument22 pagesCamlabviswamanojNo ratings yet
- Ubd WonderDocument13 pagesUbd Wonderapi-422461005100% (1)
- Slack Byte and Structure Padding in StructuresDocument3 pagesSlack Byte and Structure Padding in StructureskrishnanandNo ratings yet
- PH Probe For The PIC Temperature ControllerDocument6 pagesPH Probe For The PIC Temperature ControllerMohamad ZikriNo ratings yet
- Kollmorgen PMA Series CatalogDocument6 pagesKollmorgen PMA Series CatalogElectromateNo ratings yet
- RO-BL-005-Mech-XII-2022 Desmi Pump Hose Radiator Clamp Hose Rubber Gasket Air Filter Dust Strip Curtain Spark LighterDocument2 pagesRO-BL-005-Mech-XII-2022 Desmi Pump Hose Radiator Clamp Hose Rubber Gasket Air Filter Dust Strip Curtain Spark LighterIlyas Rangga RamadhanNo ratings yet