You might also like
- CBC Heo (Wheel Loader) NC IIDocument58 pagesCBC Heo (Wheel Loader) NC IIJohn JamesNo ratings yet
- Plastic Properties HandbookDocument15 pagesPlastic Properties HandbookguilloteARGNo ratings yet
- A Brief History of Parking - The Life and After-Life of Paving..Document5 pagesA Brief History of Parking - The Life and After-Life of Paving..dtizikaraNo ratings yet
- AN296110 Current Sensing For Renewable EnergyDocument4 pagesAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngNo ratings yet
- Catheter Related InfectionsDocument581 pagesCatheter Related InfectionshardboneNo ratings yet
- Dynamic BTS Power ControlDocument16 pagesDynamic BTS Power ControlPandi Indra KurniaNo ratings yet
- MH5-C Prospekt PDFDocument16 pagesMH5-C Prospekt PDFvatasaNo ratings yet
- Crypto Wall Crypto Snipershot OB Strategy - Day Trade SwingDocument29 pagesCrypto Wall Crypto Snipershot OB Strategy - Day Trade SwingArete JinseiNo ratings yet
- BTS Power ControlDocument31 pagesBTS Power ControlLee NghiaNo ratings yet
- Tutorial Chapter 5 - Power System ControlDocument2 pagesTutorial Chapter 5 - Power System ControlsahibNo ratings yet
- Quality Control of Rigid Pavements 1Document58 pagesQuality Control of Rigid Pavements 1pranjpatil100% (1)
- Leadership and Management in Different Arts FieldsDocument10 pagesLeadership and Management in Different Arts Fieldsjay jayNo ratings yet
- 2 Gul Per Zte FDD Ran Roadmap v1.02 2014q1Document24 pages2 Gul Per Zte FDD Ran Roadmap v1.02 2014q1dtizikaraNo ratings yet
- E User Description Dynamic BTS Power ConDocument29 pagesE User Description Dynamic BTS Power Conelahi elahiNo ratings yet
- User Description, Dynamic BTS Power ControlDocument19 pagesUser Description, Dynamic BTS Power Controlangga measNo ratings yet
- CDMA2000 1x Key Technology-Power Control: ZTE University Cdma Bss T&D TeamDocument17 pagesCDMA2000 1x Key Technology-Power Control: ZTE University Cdma Bss T&D TeamSalahAL-HakimiNo ratings yet
- Power Budget CalculationsDocument40 pagesPower Budget CalculationsfongaphobicNo ratings yet
- PS Power ControlDocument74 pagesPS Power ControlCuongDolaNo ratings yet
- GSM RF Power Control: RF Power Control Is A Process of Adjusting The Power Level of A Mobile Radio AsDocument2 pagesGSM RF Power Control: RF Power Control Is A Process of Adjusting The Power Level of A Mobile Radio AsphaniNo ratings yet
- Abis Balance and SensitivityDocument9 pagesAbis Balance and SensitivityYassine TidjaniNo ratings yet
- Introduction For Path Imbalance For KPI ProblemDocument28 pagesIntroduction For Path Imbalance For KPI ProblemMohamed Abdelsalam100% (1)
- GSM TaDocument11 pagesGSM TabonfireeNo ratings yet
- CMOS Low-Power Analog Circuit DesignDocument55 pagesCMOS Low-Power Analog Circuit DesignRajesh_Nagaraj_9325No ratings yet
- DS-CDMA Cellular Systems Performance With Base Station Assignment, Power Control Error and Beamforming Over Multipath FadingDocument18 pagesDS-CDMA Cellular Systems Performance With Base Station Assignment, Power Control Error and Beamforming Over Multipath FadingAIRCC - IJCNCNo ratings yet
- EE 382C Literature Survey Adaptive Power Control Module in Cellular Radio SystemDocument8 pagesEE 382C Literature Survey Adaptive Power Control Module in Cellular Radio Systemwaqas827No ratings yet
- WCDMA FundamentalDocument39 pagesWCDMA FundamentaldonnyNo ratings yet
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document9 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationNo ratings yet
- Power Control and Diversity Performance Analysis in CDMA SystemsDocument6 pagesPower Control and Diversity Performance Analysis in CDMA SystemsRakesh PatelNo ratings yet
- A Self-Organized Uplink Power Control For Cross-Tier Interference Management in Femtocell NetworksDocument6 pagesA Self-Organized Uplink Power Control For Cross-Tier Interference Management in Femtocell NetworksMark KGNo ratings yet
- Linearity Enhancement of Operational Transconductance Amplifier Using SourceDocument7 pagesLinearity Enhancement of Operational Transconductance Amplifier Using SourceIAEME PublicationNo ratings yet
- Parameter DefinitionsDocument8 pagesParameter DefinitionsRupeshNo ratings yet
- UMTS Power ControlDocument3 pagesUMTS Power Controlrf telecomNo ratings yet
- Modeling and Performance Analysis of A DVR For Non-Linear LoadDocument6 pagesModeling and Performance Analysis of A DVR For Non-Linear LoadalNo ratings yet
- Design of High Performance Dynamic CMOS Circuits in Deep Submicron TechnologyDocument15 pagesDesign of High Performance Dynamic CMOS Circuits in Deep Submicron TechnologyEeshwar Ram JNo ratings yet
- D6 Transmission Model Parameter Draft1-2 - 9!3!2010Document38 pagesD6 Transmission Model Parameter Draft1-2 - 9!3!2010فیضان حنیفNo ratings yet
- Self-Tuning Adaptive Algorithms in The Power Control of Wcdma SystemsDocument6 pagesSelf-Tuning Adaptive Algorithms in The Power Control of Wcdma SystemsSaifizi SaidonNo ratings yet
- Huawei TMA SupportDocument33 pagesHuawei TMA SupportSathorn TumNo ratings yet
- UMTS Power ControlDocument18 pagesUMTS Power ControlAysha MaazNo ratings yet
- Load Flow Analysis and GA MethodDocument8 pagesLoad Flow Analysis and GA Methodhodeegits9526No ratings yet
- Handoff and Droped Calls (Unit-III PCMC)Document15 pagesHandoff and Droped Calls (Unit-III PCMC)20KA1AO524No ratings yet
- Zlatka Tecec Kvalifikacijki Ispit Rad EngDocument6 pagesZlatka Tecec Kvalifikacijki Ispit Rad EngkurabyqldNo ratings yet
- CH 5Document15 pagesCH 5mohamed ameeNo ratings yet
- Transmit Power Management Technique For Wireless Communication NetworksDocument6 pagesTransmit Power Management Technique For Wireless Communication Networksarnab_brightNo ratings yet
- Power LevelDocument2 pagesPower LevelpoteNo ratings yet
- Power Quality Improvement by Using Discrete Wavelet Transform Based DSTATCOMDocument15 pagesPower Quality Improvement by Using Discrete Wavelet Transform Based DSTATCOMIJRASETPublicationsNo ratings yet
- A New Differential Protection Scheme For Busbar Considering CT Saturation EffectDocument4 pagesA New Differential Protection Scheme For Busbar Considering CT Saturation EffectMuruganNo ratings yet
- MS Power ControlDocument3 pagesMS Power ControlFarukh MunirNo ratings yet
- Power-Adaptation Strategies For DS/CDMA Communications With Successive Interference Cancellation in Nakagami-Fading ChannelsDocument7 pagesPower-Adaptation Strategies For DS/CDMA Communications With Successive Interference Cancellation in Nakagami-Fading ChannelsPhani RamakrishnaNo ratings yet
- 27 OMC Radio Parameters 104 OkDocument104 pages27 OMC Radio Parameters 104 OkabojablNo ratings yet
- OMF010003 Power Control ISSUE1.4: Wireless Training DepartmentDocument50 pagesOMF010003 Power Control ISSUE1.4: Wireless Training DepartmentnaveedalishaNo ratings yet
- GSMplann 001Document3 pagesGSMplann 001kkmNo ratings yet
- Research Inventy: International Journal of Engineering and ScienceDocument7 pagesResearch Inventy: International Journal of Engineering and ScienceinventyNo ratings yet
- A Voltage Regulator For Power Quality Improvement in Low-Voltage Distribution GridsDocument12 pagesA Voltage Regulator For Power Quality Improvement in Low-Voltage Distribution GridsSiva KumarNo ratings yet
- Institute of Communications Engineering Tampere University of Technolo Gy P.O. Box 533 FI-33101 Tampere, FinlandDocument6 pagesInstitute of Communications Engineering Tampere University of Technolo Gy P.O. Box 533 FI-33101 Tampere, FinlandBoyke PardedeNo ratings yet
- BTS and MS Power ControlDocument42 pagesBTS and MS Power ControlsiroguzNo ratings yet
- Modeling and Simulation of SRF and P-Q Based Control DstatcomDocument7 pagesModeling and Simulation of SRF and P-Q Based Control DstatcomIJERDNo ratings yet
- Establishing Contingency Analysis With FACTS Devices Using Power World SimulatorDocument18 pagesEstablishing Contingency Analysis With FACTS Devices Using Power World SimulatorNasr GhanmiNo ratings yet
- Optimal Voltage Regulator Placement in A Radial Distribution System Using Fuzzy Logic 2Document8 pagesOptimal Voltage Regulator Placement in A Radial Distribution System Using Fuzzy Logic 2Ganesh CmNo ratings yet
- Uplink Transmit Power Control During Soft Handoff in DS/CDMA SystemsDocument5 pagesUplink Transmit Power Control During Soft Handoff in DS/CDMA SystemsMuhammad Jamil AwanNo ratings yet
- 22 GPRS-MSPWRCTRL R7aDocument12 pages22 GPRS-MSPWRCTRL R7ahaithem_zribiNo ratings yet
- Low Power Techniques For Gray Shades in Liquid Crystal DisplaysDocument8 pagesLow Power Techniques For Gray Shades in Liquid Crystal DisplaysVishalPandeyNo ratings yet
- Laboratory: Generation of Am SignalsDocument25 pagesLaboratory: Generation of Am SignalsTun ShukorNo ratings yet
- UL DL BalanceDocument3 pagesUL DL BalanceBenaiad AbdellahNo ratings yet
- A Comparative Study of Matlab Results and VHDL Analysis of DWT For Efficient Power SystemsDocument7 pagesA Comparative Study of Matlab Results and VHDL Analysis of DWT For Efficient Power SystemsAdriana Daniela SanduNo ratings yet
- Matecconf Etic2017 01037Document8 pagesMatecconf Etic2017 01037Cristo CrossNo ratings yet
- Optimization and Simulation of Two Stage Operational Amplifier Using 180nm and 250nm TechnologyDocument4 pagesOptimization and Simulation of Two Stage Operational Amplifier Using 180nm and 250nm TechnologyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Power Control Techniques To Be Used in 3G (Wcdma)Document4 pagesPower Control Techniques To Be Used in 3G (Wcdma)Thuan TranNo ratings yet
- Op Amp PaperDocument6 pagesOp Amp PaperSrinivasu IrlapatiNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- 2.2 Core Networks & Point To Point LinksDocument32 pages2.2 Core Networks & Point To Point LinksdtizikaraNo ratings yet
- Landscape Typology As The Basis For Landscape Protection and DevelopmentDocument6 pagesLandscape Typology As The Basis For Landscape Protection and DevelopmentdtizikaraNo ratings yet
- 597 - Semiconductor in Equilibrium&Pn Junction1Document65 pages597 - Semiconductor in Equilibrium&Pn Junction1dtizikaraNo ratings yet
- Proposed Road Network: LegendDocument1 pageProposed Road Network: LegenddtizikaraNo ratings yet
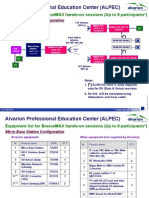
- Equipment For B-MAX Hands-On 05-06-01Document5 pagesEquipment For B-MAX Hands-On 05-06-01dtizikaraNo ratings yet
- WiMAX July 2005 1Document21 pagesWiMAX July 2005 1dtizikaraNo ratings yet
- TSI ETR 357 Echnical Eport: Source: ETSI TC-SMG Reference: DTR/SMG-000590QDocument107 pagesTSI ETR 357 Echnical Eport: Source: ETSI TC-SMG Reference: DTR/SMG-000590QdtizikaraNo ratings yet
- Sjzl20094800-ZXG10 IBSC (V6.20.10) Performance Counter ReferenceDocument1,657 pagesSjzl20094800-ZXG10 IBSC (V6.20.10) Performance Counter ReferencedtizikaraNo ratings yet
- Online Automated Tuning of RRM Parameters of UMTS Networks: Uplink Load Factor ThresholdDocument4 pagesOnline Automated Tuning of RRM Parameters of UMTS Networks: Uplink Load Factor ThresholddtizikaraNo ratings yet
- Active Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023Document119 pagesActive Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023jagdeepchkNo ratings yet
- (20836104 - Artificial Satellites) Investigation of The Accuracy of Google Earth Elevation DataDocument9 pages(20836104 - Artificial Satellites) Investigation of The Accuracy of Google Earth Elevation DataSunidhi VermaNo ratings yet
- Subject OrientationDocument15 pagesSubject OrientationPearl OgayonNo ratings yet
- How Chargers WorkDocument21 pagesHow Chargers WorkMuhammad Irfan RiazNo ratings yet
- Lacey Robertson Resume 3-6-20Document1 pageLacey Robertson Resume 3-6-20api-410771996No ratings yet
- FMEA Minus The PainDocument7 pagesFMEA Minus The PainMUNISNo ratings yet
- Toolbox TalkDocument14 pagesToolbox Talkcall_mustafas2361No ratings yet
- Based On PSA 700 Revised - The Independent Auditor's Report On A Complete Set of General Purpose Financial StatementsDocument12 pagesBased On PSA 700 Revised - The Independent Auditor's Report On A Complete Set of General Purpose Financial Statementsbobo kaNo ratings yet
- Carnegie Mellon Thesis RepositoryDocument4 pagesCarnegie Mellon Thesis Repositoryalisonreedphoenix100% (2)
- NHD Process PaperDocument2 pagesNHD Process Paperapi-203024952100% (1)
- DIR-819 A1 Manual v1.02WW PDFDocument172 pagesDIR-819 A1 Manual v1.02WW PDFSerginho Jaafa ReggaeNo ratings yet
- Reference Paper Literature ReviewDocument5 pagesReference Paper Literature ReviewAani RashNo ratings yet
- Trina 440W Vertex-S+ DatasheetDocument2 pagesTrina 440W Vertex-S+ DatasheetBrad MannNo ratings yet
- Simon Ardhi Yudanto UpdateDocument3 pagesSimon Ardhi Yudanto UpdateojksunarmanNo ratings yet
- CISF Manual Final OriginalDocument17 pagesCISF Manual Final OriginalVaishnavi JayakumarNo ratings yet
- Chapter 1 - Main Hydrological ConceptsDocument16 pagesChapter 1 - Main Hydrological ConceptsWhy Merah0% (1)
- Optimized Maximum Power Point Tracker For Fast Changing Environmental ConditionsDocument7 pagesOptimized Maximum Power Point Tracker For Fast Changing Environmental ConditionsSheri ShahiNo ratings yet
- SCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Document104 pagesSCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Athulya ThondangattilNo ratings yet
- Sundar Pichai PDFDocument6 pagesSundar Pichai PDFHimanshi Patle100% (1)
- Lady in The House, Her Responsibilities & Ambitions: Amrita DuhanDocument7 pagesLady in The House, Her Responsibilities & Ambitions: Amrita DuhanFitness FableNo ratings yet
- European Asphalt Standards DatasheetDocument1 pageEuropean Asphalt Standards DatasheetmandraktreceNo ratings yet
- Derivational and Inflectional Morpheme in English LanguageDocument11 pagesDerivational and Inflectional Morpheme in English LanguageEdificator BroNo ratings yet