You might also like
- A.K. Molyneaux 1996 Externally Pressurised and Hybrid Bearings Lubricated With R134a For Oil-Free CompressorsDocument7 pagesA.K. Molyneaux 1996 Externally Pressurised and Hybrid Bearings Lubricated With R134a For Oil-Free CompressorsChoon Seng WongNo ratings yet
- Notes15 Gas Film LubricationDocument58 pagesNotes15 Gas Film LubricationAKHIL PASULANo ratings yet
- Agitator DesignDocument8 pagesAgitator DesignCMEngineersNo ratings yet
- GE Hydro Thrust BearingsDocument3 pagesGE Hydro Thrust BearingsJesusMaldonado0% (1)
- Gas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesFrom EverandGas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesNo ratings yet
- Prospects of Decreasing Power Losses in Hydrostatic Thrust BearingDocument7 pagesProspects of Decreasing Power Losses in Hydrostatic Thrust BearingMuhammad Haekal MufianNo ratings yet
- Air Bearing Research PaperDocument6 pagesAir Bearing Research Paperfvgymwfv100% (1)
- Applied Process Design for Chemical and Petrochemical Plants: Volume 1From EverandApplied Process Design for Chemical and Petrochemical Plants: Volume 1Rating: 3.5 out of 5 stars3.5/5 (3)
- Aerostatic Bearings: - Aerostatic Bearings Utilize A Thin Film of High-Pressure AirDocument21 pagesAerostatic Bearings: - Aerostatic Bearings Utilize A Thin Film of High-Pressure AirEdmilson DantasNo ratings yet
- Efficient Screw Compressors for Dry Air DeliveryDocument10 pagesEfficient Screw Compressors for Dry Air DeliverySaeedAkbarzadehNo ratings yet
- Hydraulic Crane Bumpers IntroductionDocument2 pagesHydraulic Crane Bumpers IntroductionManu GimenezNo ratings yet
- Optimization of Diesel Engine Cylinder Liner Undercut 6Document7 pagesOptimization of Diesel Engine Cylinder Liner Undercut 6International Journal of Innovative Science and Research TechnologyNo ratings yet
- Mechanical Systems and Signal Processing: Christopher DellacorteDocument10 pagesMechanical Systems and Signal Processing: Christopher DellacortepooyakhpNo ratings yet
- Bit Hydraulics Optimization AADE 07 NTCE 35Document10 pagesBit Hydraulics Optimization AADE 07 NTCE 35ezrawongNo ratings yet
- Literature Review of Compressed Air EngineDocument4 pagesLiterature Review of Compressed Air Engineea85vjdw100% (1)
- Study On Design of Casing of Steam TurbineDocument3 pagesStudy On Design of Casing of Steam Turbinesevero97No ratings yet
- Thesis UwaDocument8 pagesThesis UwaHelpWithWritingAPaperForCollegeSingapore100% (2)
- Design Criteria and Performance of An Advanced Reciprocating CompDocument9 pagesDesign Criteria and Performance of An Advanced Reciprocating CompEstebanGiraldoNo ratings yet
- Faure Herman TurbineDocument3 pagesFaure Herman TurbinedidikosanNo ratings yet
- APC000887 LindeDocument9 pagesAPC000887 LindegaihardNo ratings yet
- Optimum Design of A Journal Bearing - A Review: National Conference On Recent Trends in Engineering & TechnologyDocument4 pagesOptimum Design of A Journal Bearing - A Review: National Conference On Recent Trends in Engineering & TechnologyVirginia KnightNo ratings yet
- Design and Fabrication of A Bicycle That Runs On Compressed AirDocument4 pagesDesign and Fabrication of A Bicycle That Runs On Compressed AirVikas ChandranNo ratings yet
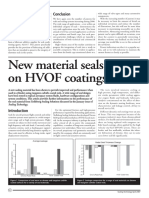
- New Material Seals Better On HVOF CoatingsDocument2 pagesNew Material Seals Better On HVOF Coatingssandbad2100% (2)
- A Practical Method To Account For Seal Friction in Aircraft Hydraulic Actuator Preliminary DesignDocument8 pagesA Practical Method To Account For Seal Friction in Aircraft Hydraulic Actuator Preliminary DesignScaricatore92No ratings yet
- Application of Topological Optimization MethodologyDocument11 pagesApplication of Topological Optimization MethodologySD TECHNo ratings yet
- Tilting Pad Thrust BearingDocument6 pagesTilting Pad Thrust BearingChristopher GarciaNo ratings yet
- HYDROFORMING PROCESS OVERVIEWDocument5 pagesHYDROFORMING PROCESS OVERVIEWAnwarNo ratings yet
- Hydrodynamics and Sonic Flow Transition in Dry Gas SealsDocument13 pagesHydrodynamics and Sonic Flow Transition in Dry Gas SealsMiguel Angel BeltranNo ratings yet
- Pneumatic Lift Research PaperDocument5 pagesPneumatic Lift Research Papertqpkpiukg100% (1)
- Advancements in Compression Technology For Syn Gas Applications Efficiency and ReliabilityDocument7 pagesAdvancements in Compression Technology For Syn Gas Applications Efficiency and Reliabilityvaratharajan g rNo ratings yet
- Thesis PneumaticsDocument5 pagesThesis PneumaticsHelpWritingCollegePapersSavannah100% (2)
- Research Paper On Frictionless Compressor TechnologyDocument4 pagesResearch Paper On Frictionless Compressor Technologygw155nahNo ratings yet
- Compressor Dry Gas SealsDocument12 pagesCompressor Dry Gas SealsRajeev Domble100% (3)
- Compressor Maint ListDocument3 pagesCompressor Maint Listsantosh kumar100% (1)
- Design Optimization of An Automotive Turbocharger Thrust Bearing Using A CFD-Based THD Computational ApproachDocument21 pagesDesign Optimization of An Automotive Turbocharger Thrust Bearing Using A CFD-Based THD Computational ApproachIrah ZinirahNo ratings yet
- CDU Increase Distillate YieldDocument9 pagesCDU Increase Distillate Yieldrvkumar61No ratings yet
- GearboxDocument5 pagesGearboxakshaybj4396100% (1)
- Tribology International: J. Bouyer, M. Wodtke, M. FillonDocument12 pagesTribology International: J. Bouyer, M. Wodtke, M. FillonAhmad Murtadlo ZakaNo ratings yet
- Dual Gas-Lubricated Seals Provide Energy Efficient SolutionsDocument2 pagesDual Gas-Lubricated Seals Provide Energy Efficient Solutionssudhindra_tiwariNo ratings yet
- Optimisation of Screw Compressors: SynopsisDocument28 pagesOptimisation of Screw Compressors: SynopsisAkhil DasariNo ratings yet
- Wartsila E HubDocument2 pagesWartsila E HubSlamet Prayitno HetaNo ratings yet
- StalDocument8 pagesStalzbiornik23100% (1)
- Pizeoelectric Gas BearingsDocument10 pagesPizeoelectric Gas Bearings1mmahoneyNo ratings yet
- SAG Mill ComponentsDocument7 pagesSAG Mill ComponentsRodrigo GarcíaNo ratings yet
- Literature SurveyDocument6 pagesLiterature SurveyMekhaile PjNo ratings yet
- Wartsila o e W 32gd TRDocument16 pagesWartsila o e W 32gd TRMartin Kratky100% (1)
- Spe 120632 MS PDocument0 pagesSpe 120632 MS PMagaña AuryNo ratings yet
- Rotating Equipment PDFDocument365 pagesRotating Equipment PDFromadhinhoNo ratings yet
- Hydrodynamics BearingsDocument28 pagesHydrodynamics BearingsManuel CañadasNo ratings yet
- Centrifugal Compressor GuidenceDocument4 pagesCentrifugal Compressor GuidenceChem.Engg100% (1)
- A guide to hydrodynamic bearingsDocument28 pagesA guide to hydrodynamic bearingssumantabal_uceNo ratings yet
- Kingsbury BearingDocument28 pagesKingsbury Bearingkalam2k2100% (1)
- Mechanical Seal Selection For VSDs PDFDocument3 pagesMechanical Seal Selection For VSDs PDFAnonymous 1XHScfCINo ratings yet
- AODD Pumps in Chemical ProcessesDocument7 pagesAODD Pumps in Chemical ProcessesAlexNo ratings yet
- Academic Counseling For MBA: Indira Gandhi National Open UniversityDocument2 pagesAcademic Counseling For MBA: Indira Gandhi National Open Universitysandy_m39No ratings yet
- IJERTV1IS4061Document4 pagesIJERTV1IS4061sandy_m39No ratings yet
- Francis TurbineDocument39 pagesFrancis Turbineswaraj2904No ratings yet
- Responsibilties of A Professional ManagerDocument11 pagesResponsibilties of A Professional ManagerElma V MuthuNo ratings yet
- 60q ADocument9 pages60q Akhanny96No ratings yet
- 2014 Calendar: January February MarchDocument1 page2014 Calendar: January February Marchsandy_m39No ratings yet
- Bolted Joint R1Document13 pagesBolted Joint R1uvarajmecheriNo ratings yet
- Heat PipeDocument59 pagesHeat Pipesandy_m3975% (4)
- Wafer ProberDocument4 pagesWafer ProberHemanathan ManiNo ratings yet
- Technical Seminar Iv: Hyperloop TechnologyDocument20 pagesTechnical Seminar Iv: Hyperloop Technologyprakash rainaNo ratings yet
- Report on Study of Air BearingsDocument6 pagesReport on Study of Air BearingsYashOdeepAthawale0% (1)
- Status of Foil Bearings 1980 NASADocument107 pagesStatus of Foil Bearings 1980 NASA1mmahoneyNo ratings yet
- Mitutoyo Crysta Apex SDocument12 pagesMitutoyo Crysta Apex Sjeremy pohNo ratings yet
- Diamond Micro-MachinigDocument33 pagesDiamond Micro-MachinigpkuppanNo ratings yet
- Electro-Seis Long Stroke Shaker With Air Bearing Load Mounting TableDocument3 pagesElectro-Seis Long Stroke Shaker With Air Bearing Load Mounting TableMarck Cruz PastorNo ratings yet
- Air BearingsDocument68 pagesAir BearingsMichael SchmichaelNo ratings yet
- Hyperloop Technology: Seminar OnDocument24 pagesHyperloop Technology: Seminar OnAditya ThokalNo ratings yet
- C. Mike Waits ARMY LaboratoryDocument34 pagesC. Mike Waits ARMY LaboratoryMoisii PaulNo ratings yet
- 84 Roundness E 2112 READ AccretechDocument94 pages84 Roundness E 2112 READ Accretechcavoixanh89No ratings yet
- Plotter PDFDocument13 pagesPlotter PDFClifford RyanNo ratings yet
- AR-G2/AR 2000ex/AR 1500ex RheometersDocument58 pagesAR-G2/AR 2000ex/AR 1500ex RheometersV.D.No ratings yet
- Formline en 10037927Document20 pagesFormline en 10037927sreenam225254No ratings yet
- LDDM Linear Direct Drive Motors. ULIM SeriesDocument24 pagesLDDM Linear Direct Drive Motors. ULIM SeriesajibNo ratings yet
- Air BearingDocument10 pagesAir BearingPrathyusha RamadurgamNo ratings yet
- Air BearingDocument2 pagesAir BearingMohAnVinNo ratings yet
- Air BearingDocument3 pagesAir Bearingjoshibec50% (2)
- Hyperloop New Project For OriginalDocument15 pagesHyperloop New Project For OriginalSridhar KolluruNo ratings yet
- Introduction To Mechanical Micro Machining Assignment-Week 8Document7 pagesIntroduction To Mechanical Micro Machining Assignment-Week 8PranjalGuptaNo ratings yet
- LT 999 600 227 PPH308 Integrator PackageDocument14 pagesLT 999 600 227 PPH308 Integrator Packagerokoma7No ratings yet
- AIR BEARINGS - Review and ApplicationsDocument20 pagesAIR BEARINGS - Review and ApplicationsSubhamMohantyNo ratings yet
- BBR ManualDocument59 pagesBBR ManualNavi MoralesNo ratings yet
- Crysta-Plus M Series: Manual Coordinate Measuring Machine MicrocordDocument12 pagesCrysta-Plus M Series: Manual Coordinate Measuring Machine Microcordhoang BuiNo ratings yet
- PCF 310 and Motor AssemblyDocument77 pagesPCF 310 and Motor AssemblyVasantha AbeygoonaratneNo ratings yet
- Microsense II - 5810: Non-Contact Capacitance Gauging Module For High Dynamic ApplicationsDocument2 pagesMicrosense II - 5810: Non-Contact Capacitance Gauging Module For High Dynamic ApplicationsasimNo ratings yet
- A Review Paper On HyperloopDocument8 pagesA Review Paper On HyperloopSomashekhar SavalajeNo ratings yet
- SEMINAR REPORT ON HYPERLOOP TECHNOLOGYDocument21 pagesSEMINAR REPORT ON HYPERLOOP TECHNOLOGYSaurabhNo ratings yet
- APS Dynamics APS Long Stroke ShakerDocument30 pagesAPS Dynamics APS Long Stroke ShakerSherif EltoukhiNo ratings yet
- Air BearingDocument15 pagesAir BearingAnson Dsouza100% (2)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Implementing an Integrated Management System (IMS): The strategic approachFrom EverandImplementing an Integrated Management System (IMS): The strategic approachRating: 5 out of 5 stars5/5 (2)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksFrom EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo ratings yet
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesFrom EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertRating: 3 out of 5 stars3/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Solar Electricity Basics: Powering Your Home or Office with Solar EnergyFrom EverandSolar Electricity Basics: Powering Your Home or Office with Solar EnergyRating: 5 out of 5 stars5/5 (3)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionFrom EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionRating: 4.5 out of 5 stars4.5/5 (16)