You might also like
- Control H BridgeDocument5 pagesControl H BridgeFahad Al-shammeriNo ratings yet
- Closed Loop Control of Grid Connected PV InverterDocument33 pagesClosed Loop Control of Grid Connected PV InverterWA Q ASNo ratings yet
- Cascadwed MultiDocument14 pagesCascadwed Multisandeepbabu28No ratings yet
- A Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridDocument4 pagesA Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridbarneypseNo ratings yet
- Alepuz 2006Document8 pagesAlepuz 2006Boris MakongNo ratings yet
- Hindawi Publishidng CorporationDocument27 pagesHindawi Publishidng CorporationAtul ChauhanNo ratings yet
- 01397427Document8 pages01397427Mihai CalinNo ratings yet
- Technique For Voltage Control in Distribution SystemDocument4 pagesTechnique For Voltage Control in Distribution Systema_mohid17No ratings yet
- IEEE 34 Bus Intermittent Sources PDFDocument8 pagesIEEE 34 Bus Intermittent Sources PDFKancherla SameeraNo ratings yet
- DC Link Voltage Control of Back-To-Back ConverterDocument6 pagesDC Link Voltage Control of Back-To-Back ConverterRoshan PradhanNo ratings yet
- GridDocument6 pagesGridgiongan342No ratings yet
- Artigo CJR IECON2002Document6 pagesArtigo CJR IECON2002AiflRopetNo ratings yet
- Predictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsDocument6 pagesPredictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsjimylihNo ratings yet
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- Robust Control of A Single-Phase VSI With LCL Filter For Grid-Tie and Islanded Operation ModesDocument8 pagesRobust Control of A Single-Phase VSI With LCL Filter For Grid-Tie and Islanded Operation ModesJoseCarlosUgazNo ratings yet
- Psat Wind FactDocument6 pagesPsat Wind FactSandeep KumarNo ratings yet
- 0912 F 50 DC 9 e 96 Ad 0 BD 000000Document4 pages0912 F 50 DC 9 e 96 Ad 0 BD 000000Pradyumna Kumar Behera100% (1)
- Impact of Wind On Tap ChangerDocument7 pagesImpact of Wind On Tap ChangerW. OmrNo ratings yet
- EEE 1105 011 Comparison of The Effects of Phase To Ground FaultsDocument7 pagesEEE 1105 011 Comparison of The Effects of Phase To Ground FaultsFAKEIDS421No ratings yet
- One-Cycle-Controlled Single-Phase Inverter For Grid Connected PV SystemDocument8 pagesOne-Cycle-Controlled Single-Phase Inverter For Grid Connected PV SystemVIJAYPUTRANo ratings yet
- A Comparative Analisys of FACTS Devices Implemented in The Romanian Power SystemDocument6 pagesA Comparative Analisys of FACTS Devices Implemented in The Romanian Power SystemsalmanNo ratings yet
- Real-Time Digital Simulation of A VSC-connected Offshore Wind FarmDocument7 pagesReal-Time Digital Simulation of A VSC-connected Offshore Wind Farmpreeti200726No ratings yet
- Improved Active Power Filter Performance For Renewable Power Generation SystemsDocument8 pagesImproved Active Power Filter Performance For Renewable Power Generation SystemsKuncham SateeshNo ratings yet
- Mat LabDocument74 pagesMat LabA RakeshNo ratings yet
- Simulation of D-Q Control System For A Unified Power Flow ControllerDocument10 pagesSimulation of D-Q Control System For A Unified Power Flow ControllerSyed Faizan AliNo ratings yet
- Control of PWM Rectifier Under Grid Voltage Dips: M. Bobrowska-Rafał, K. Rafał, G. Abad, and M. JasińskiDocument7 pagesControl of PWM Rectifier Under Grid Voltage Dips: M. Bobrowska-Rafał, K. Rafał, G. Abad, and M. JasińskiKusolManyuenNo ratings yet
- Pscad PV THDDocument6 pagesPscad PV THDRavishankar KankaleNo ratings yet
- Reduction of Current Harmonic Distortion in Three-Phase Grid-Connected Photovoltaic Inverters Via Resonant Current ControlDocument9 pagesReduction of Current Harmonic Distortion in Three-Phase Grid-Connected Photovoltaic Inverters Via Resonant Current ControlRam KumarNo ratings yet
- Microgrid Power Quality Enhancement Using A Three-Phase Four-Wire Grid-Interfacing CompensatorDocument13 pagesMicrogrid Power Quality Enhancement Using A Three-Phase Four-Wire Grid-Interfacing CompensatorHùng CậnNo ratings yet
- Battery Inverter For Modularly Structured PV Power Supply SystemsDocument4 pagesBattery Inverter For Modularly Structured PV Power Supply SystemsQM_2010No ratings yet
- Stat Com SimDocument8 pagesStat Com SimmakroumNo ratings yet
- Design and Analysis of A Grid-Connected Photovoltaic Power SystemDocument9 pagesDesign and Analysis of A Grid-Connected Photovoltaic Power SystemnmotanNo ratings yet
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDocument8 pagesImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanNo ratings yet
- Indranil Saaki Paper On Improved Control Strategy For Fuel Cell and Photo Voltaic InvertersDocument5 pagesIndranil Saaki Paper On Improved Control Strategy For Fuel Cell and Photo Voltaic InvertersIndra SakiNo ratings yet
- Paper PublicationDocument9 pagesPaper Publicationakhila100No ratings yet
- A Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power CompensationDocument6 pagesA Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power Compensationsandeepbabu28No ratings yet
- Energies: An MPC Approach For Grid-Forming Inverters: Theory and ExperimentDocument17 pagesEnergies: An MPC Approach For Grid-Forming Inverters: Theory and Experimentsalemg82No ratings yet
- Energies-06-04859 WindmillDocument20 pagesEnergies-06-04859 WindmillRani PurbasariNo ratings yet
- Solid State Transformer (SST) : Daniel Garrido, Federico RodríguezDocument6 pagesSolid State Transformer (SST) : Daniel Garrido, Federico RodríguezFede RodríguezNo ratings yet
- Current Matching Control System For Multi-Terminal DC Transmission To Integrate Offshore Wind FarmsDocument6 pagesCurrent Matching Control System For Multi-Terminal DC Transmission To Integrate Offshore Wind FarmsJackie ChuNo ratings yet
- Simplified Input-Output Linearization Control For Wind Farm Interconnection Based On Multi-Terminal VSC-HVDCDocument7 pagesSimplified Input-Output Linearization Control For Wind Farm Interconnection Based On Multi-Terminal VSC-HVDCMehmet Doğan ELBİNo ratings yet
- Dynamic Improvement of Induction Generators Connected To Distribution Systems Using A DstatcomDocument5 pagesDynamic Improvement of Induction Generators Connected To Distribution Systems Using A DstatcomVinod Kumar VudathaNo ratings yet
- Irjet V4i4113Document4 pagesIrjet V4i4113sambit dasNo ratings yet
- Power Electronics For SolarDocument9 pagesPower Electronics For SolarbalafetNo ratings yet
- 1 RVDocument19 pages1 RVthiyagusuperNo ratings yet
- HVDC Over HVAC Transmission System - Faul PDFDocument14 pagesHVDC Over HVAC Transmission System - Faul PDFRichard BecerraNo ratings yet
- Power Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDocument6 pagesPower Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDavid PerezNo ratings yet
- Advanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemDocument11 pagesAdvanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemChristian JimenezNo ratings yet
- Operation and Coordinated Control of Multi-Terminal VSC-HVDC Transmission System For Wind Power GenerationDocument7 pagesOperation and Coordinated Control of Multi-Terminal VSC-HVDC Transmission System For Wind Power GenerationGuru MishraNo ratings yet
- Electronics 08 00902Document22 pagesElectronics 08 00902Bruno HernandezNo ratings yet
- Paper 3Document6 pagesPaper 3Aadit JeyasankarNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Control of Grid Side Converter in Wind Power Based PMSG With PLL MethodDocument10 pagesControl of Grid Side Converter in Wind Power Based PMSG With PLL MethodItran AzalNo ratings yet
- Paper SaraDocument9 pagesPaper SaraSara ElbadaouiNo ratings yet
- Midterm Report: in Electrical EngineeringDocument11 pagesMidterm Report: in Electrical Engineeringdr.Sabita shresthaNo ratings yet
- Boost Current Multilevel Inverter and Its Application On Single-Phase Grid-Connected Photovoltaic SystemsDocument9 pagesBoost Current Multilevel Inverter and Its Application On Single-Phase Grid-Connected Photovoltaic SystemsShaju NaduvilNo ratings yet
- An Improved SMC Control Strategies For PMSG Based WECSDocument10 pagesAn Improved SMC Control Strategies For PMSG Based WECSGIRISHNo ratings yet
- Survey of CascadeDocument10 pagesSurvey of Cascadesumiths32No ratings yet
- Actual Wind EnergyDocument11 pagesActual Wind EnergyAbhishek V DeshpandeNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- PHD Result May Eam 2011Document3 pagesPHD Result May Eam 2011रमेश सिंहNo ratings yet
- AEM BrochureDocument28 pagesAEM Brochureरमेश सिंहNo ratings yet
- Basics of Squirrel Cage Induction Motor DesignDocument29 pagesBasics of Squirrel Cage Induction Motor Designरमेश सिंह100% (1)
- Ist Sem ResultsDocument1 pageIst Sem Resultsरमेश सिंहNo ratings yet
- Basics of Power CircuitsDocument90 pagesBasics of Power Circuitsरमेश सिंहNo ratings yet
- A Day of LifeDocument2 pagesA Day of Lifeरमेश सिंहNo ratings yet
- 11111111Document7 pages11111111रमेश सिंहNo ratings yet
- Energy Conversion Assign-2Document1 pageEnergy Conversion Assign-2रमेश सिंह67% (3)
- List of Electives: Elective - IDocument29 pagesList of Electives: Elective - Iरमेश सिंहNo ratings yet
- Leadership and ManagementDocument46 pagesLeadership and Managementरमेश सिंह100% (9)
- Topic 4: Mental AccountingDocument13 pagesTopic 4: Mental AccountingHimanshi AryaNo ratings yet
- Data Sheet WD Blue PC Hard DrivesDocument2 pagesData Sheet WD Blue PC Hard DrivesRodrigo TorresNo ratings yet
- Vangood Quotation - Refrigerator Part - 2023.3.2Document5 pagesVangood Quotation - Refrigerator Part - 2023.3.2Enmanuel Jossue Artigas VillaNo ratings yet
- Review of Related LiteratureDocument4 pagesReview of Related LiteratureCarlo Mikhail Santiago25% (4)
- CoDocument80 pagesCogdayanand4uNo ratings yet
- Internship ReportDocument46 pagesInternship ReportBilal Ahmad100% (1)
- Escario Vs NLRCDocument10 pagesEscario Vs NLRCnat_wmsu2010No ratings yet
- Ishares Core S&P/TSX Capped Composite Index Etf: Key FactsDocument2 pagesIshares Core S&P/TSX Capped Composite Index Etf: Key FactsChrisNo ratings yet
- QUIZ Group 1 Answer KeyDocument3 pagesQUIZ Group 1 Answer KeyJames MercadoNo ratings yet
- 06-Apache SparkDocument75 pages06-Apache SparkTarike ZewudeNo ratings yet
- Dialog Suntel MergerDocument8 pagesDialog Suntel MergerPrasad DilrukshanaNo ratings yet
- Ibbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Document2 pagesIbbotson Sbbi: Stocks, Bonds, Bills, and Inflation 1926-2019Bastián EnrichNo ratings yet
- RevisionHistory APFIFF33 To V219Document12 pagesRevisionHistory APFIFF33 To V219younesNo ratings yet
- Cabling and Connection System PDFDocument16 pagesCabling and Connection System PDFLyndryl ProvidoNo ratings yet
- Ces Presentation 08 23 23Document13 pagesCes Presentation 08 23 23api-317062486No ratings yet
- Banjara EmbroideryDocument34 pagesBanjara EmbroideryKriti Rama ManiNo ratings yet
- Gardner Denver PZ-11revF3Document66 pagesGardner Denver PZ-11revF3Luciano GarridoNo ratings yet
- Low Cost Building ConstructionDocument15 pagesLow Cost Building ConstructionAtta RehmanNo ratings yet
- Chapter 5Document3 pagesChapter 5Showki WaniNo ratings yet
- Enerparc - India - Company Profile - September 23Document15 pagesEnerparc - India - Company Profile - September 23AlokNo ratings yet
- 1.1. Evolution of Cloud ComputingDocument31 pages1.1. Evolution of Cloud Computing19epci022 Prem Kumaar RNo ratings yet
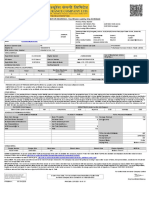
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDocument1 pageMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VNo ratings yet
- 450i User ManualDocument54 pages450i User ManualThượng Lê Văn0% (2)
- Sourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyDocument58 pagesSourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyAlaa Al HarbiNo ratings yet
- Digital LiteracyDocument19 pagesDigital Literacynagasms100% (1)
- ST JohnDocument20 pagesST JohnNa PeaceNo ratings yet
- Electricity 10thDocument45 pagesElectricity 10thSuryank sharmaNo ratings yet
- Underwater Wellhead Casing Patch: Instruction Manual 6480Document8 pagesUnderwater Wellhead Casing Patch: Instruction Manual 6480Ragui StephanosNo ratings yet
- Group 1 Disaster Management Notes by D. Malleswari ReddyDocument49 pagesGroup 1 Disaster Management Notes by D. Malleswari Reddyraghu ramNo ratings yet
- Material Safety Data Sheet (According To 91/155 EC)Document4 pagesMaterial Safety Data Sheet (According To 91/155 EC)Jaymit PatelNo ratings yet