You might also like
- PIC Base C 1Document0 pagesPIC Base C 1big633No ratings yet
- Intermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingFrom EverandIntermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingNo ratings yet
- PIC Intro 0Document7 pagesPIC Intro 0Raghavadeep ReddyNo ratings yet
- PIC IntroDocument7 pagesPIC IntroMsJojo AlkhouriNo ratings yet
- Programming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CFrom EverandProgramming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CNo ratings yet
- PIC Mid C 1Document21 pagesPIC Mid C 1I.k. Neena100% (1)
- PIC Intro 0Document0 pagesPIC Intro 0Cassio SousaNo ratings yet
- C Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingFrom EverandC Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingNo ratings yet
- Programming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationFrom EverandProgramming 8-bit PIC Microcontrollers in C: with Interactive Hardware SimulationRating: 2.5 out of 5 stars2.5/5 (5)
- C Programming Wizardry: From Zero to Hero in 10 Days: Programming Prodigy: From Novice to Virtuoso in 10 DaysFrom EverandC Programming Wizardry: From Zero to Hero in 10 Days: Programming Prodigy: From Novice to Virtuoso in 10 DaysNo ratings yet
- PIC Development System (Compilers, Simulator andDocument42 pagesPIC Development System (Compilers, Simulator andPirapuraj PonnampalamNo ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- C Programming of Microcontroller For Hobby RoboticsDocument14 pagesC Programming of Microcontroller For Hobby RoboticsCMPENo ratings yet
- An Introduction To Programming The Microchip PIC in CDocument162 pagesAn Introduction To Programming The Microchip PIC in Cagg_mayur1100% (8)
- PIC Projects and Applications using C: A Project-based ApproachFrom EverandPIC Projects and Applications using C: A Project-based ApproachRating: 4 out of 5 stars4/5 (2)
- Pic-Programming-With-Ccs-C - (Cuuduongthancong - Com) PDFDocument135 pagesPic-Programming-With-Ccs-C - (Cuuduongthancong - Com) PDFbenjarrayNo ratings yet
- Curso Pic24j60Document173 pagesCurso Pic24j60Diojan Torres100% (1)
- Master and Command C For PIC MCUsDocument1 pageMaster and Command C For PIC MCUsmartinez_cvmNo ratings yet
- Porting uCOS-II To A PIC MicrocontrollerDocument18 pagesPorting uCOS-II To A PIC MicrocontrollerHimanshu SharmaNo ratings yet
- Mplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideDocument30 pagesMplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideanandkalodeNo ratings yet
- ManualDocument155 pagesManualJulio Infantes100% (1)
- Pic Basic Pro GuideDocument120 pagesPic Basic Pro GuideWilliam Garcia BedoyaNo ratings yet
- Lab 1 Submission - Microchip MPLAB C18 C Compiler OverviewDocument4 pagesLab 1 Submission - Microchip MPLAB C18 C Compiler OverviewSravyaNo ratings yet
- C Reference Manual - October 2005.13Document1 pageC Reference Manual - October 2005.13diegoifgNo ratings yet
- Using The CCS C Compiler For Rapid Development of MicrocontrollerDocument158 pagesUsing The CCS C Compiler For Rapid Development of MicrocontrollerPAUL BALLARTANo ratings yet
- Pick A PIC ProjectDocument21 pagesPick A PIC ProjectZlatko GrgicNo ratings yet
- A Study of Msp430 ToolchainDocument10 pagesA Study of Msp430 ToolchainTrí ToànNo ratings yet
- C Programming For Beginners: The Simple Guide to Learning C Programming Language Fast!From EverandC Programming For Beginners: The Simple Guide to Learning C Programming Language Fast!Rating: 5 out of 5 stars5/5 (1)
- Electronica - PIC Basic ProDocument98 pagesElectronica - PIC Basic ProzorrinNo ratings yet
- Install Ucosii Ide68kDocument7 pagesInstall Ucosii Ide68kRockeyNo ratings yet
- ES Lab Manual 1Document95 pagesES Lab Manual 1Rufus DavidNo ratings yet
- Picbasic ProDocument55 pagesPicbasic ProLorena GaytanNo ratings yet
- PlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6From EverandPlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6No ratings yet
- Academic Program MICROCHIPDocument8 pagesAcademic Program MICROCHIPanitat2012No ratings yet
- Objectives: Lab 8 Introduction To Mikroc LanguageDocument4 pagesObjectives: Lab 8 Introduction To Mikroc LanguagexorogerNo ratings yet
- Fatima Michael College of Engineering & Technology Ee6008 - Microcontroller Based System DesignDocument66 pagesFatima Michael College of Engineering & Technology Ee6008 - Microcontroller Based System DesignsheelaNo ratings yet
- MCHP Usb Otg Com3202 v095 Lab Manual PhilipDocument69 pagesMCHP Usb Otg Com3202 v095 Lab Manual PhilipBerat Neslihan100% (2)
- PIC Basic CourseDocument57 pagesPIC Basic Coursetermicas100% (3)
- Pic Micro Pascal V2 Rev GDocument108 pagesPic Micro Pascal V2 Rev Gjesito2010No ratings yet
- Cross CompilerDocument17 pagesCross CompilerKhan Arshid IqbalNo ratings yet
- BDS C 1.46 Users Guide Mar82Document133 pagesBDS C 1.46 Users Guide Mar82Junior MartinsNo ratings yet
- 2.tutorial 1 - Implementation of A USB Based PIC-To-PC CommunicationDocument30 pages2.tutorial 1 - Implementation of A USB Based PIC-To-PC CommunicationMurat Şen100% (1)
- Keil IntroDocument3 pagesKeil IntroMechiri Ashok100% (1)
- XC8 MplabDocument72 pagesXC8 MplabAlex Castillon100% (1)
- ReportDocument5 pagesReportNitin RajNo ratings yet
- Pocket PC Compiler: Mini Project ReportDocument22 pagesPocket PC Compiler: Mini Project ReportAakash TyagiNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Document21 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Tomás BurónNo ratings yet
- Proteus IntroductionDocument18 pagesProteus IntroductionJoel Sebastian DelgadoNo ratings yet
- How To Run MPI Under CodeBlocksDocument2 pagesHow To Run MPI Under CodeBlockslolo406No ratings yet
- Chapter 6Document5 pagesChapter 6kssaravana89No ratings yet
- 19ELC212 - MCA - Lab ManualDocument52 pages19ELC212 - MCA - Lab ManualVatsalya NagNo ratings yet
- Embedded C Programming: Techniques and Applications of C and PIC MCUSFrom EverandEmbedded C Programming: Techniques and Applications of C and PIC MCUSRating: 3 out of 5 stars3/5 (3)
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationFrom EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo ratings yet
- Learn to Code with C: Program with the world's most popular language on your Raspberry PiFrom EverandLearn to Code with C: Program with the world's most popular language on your Raspberry PiNo ratings yet
- C Programming: C Programming Language for beginners, teaching you how to learn to code in C fast!From EverandC Programming: C Programming Language for beginners, teaching you how to learn to code in C fast!No ratings yet
- How To Recalibrate A PICDocument3 pagesHow To Recalibrate A PICfrank_grimesNo ratings yet
- PIC18F46J50 ErrataDocument12 pagesPIC18F46J50 Erratafrank_grimesNo ratings yet
- Accurate TMR0 InterruptsDocument6 pagesAccurate TMR0 Interruptsfrank_grimesNo ratings yet
- Pic 16 F 877 ADocument688 pagesPic 16 F 877 ApvylaleNo ratings yet
- Passing A Port Pin As An Argument To A Function - MPLAB XC8Document1 pagePassing A Port Pin As An Argument To A Function - MPLAB XC8frank_grimesNo ratings yet
- PIC18F46J50Document562 pagesPIC18F46J50frank_grimesNo ratings yet
- 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)Document3 pages2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)frank_grimesNo ratings yet
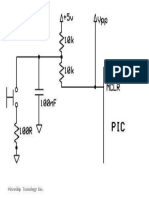
- MCLR Reset CircuitDocument1 pageMCLR Reset Circuitfrank_grimesNo ratings yet
- 01028BDocument10 pages01028Bjohn100% (1)
- HD44780Document60 pagesHD44780nzltfNo ratings yet
- Receptor Infrarrojo Tsop382Document7 pagesReceptor Infrarrojo Tsop382frank_grimesNo ratings yet
- Open Collector Outputs - Signet Sensors PDFDocument4 pagesOpen Collector Outputs - Signet Sensors PDFfrank_grimesNo ratings yet
- PICDocument46 pagesPICNguyen Minh TuNo ratings yet
- Stepping Motors FundamentalsDocument22 pagesStepping Motors Fundamentalsvishnukarthick108No ratings yet
- Booksim 2.0 User'S GuideDocument10 pagesBooksim 2.0 User'S GuideSourav SatpathyNo ratings yet
- Lecture 1 - Manufacturing Process and Process ControlDocument8 pagesLecture 1 - Manufacturing Process and Process Controlfrank_grimesNo ratings yet
- Assignment 1Document6 pagesAssignment 1frank_grimesNo ratings yet
- Exercise1 AssignmentDocument5 pagesExercise1 Assignmentfrank_grimesNo ratings yet
- B BKZ Hyd Il 2 CDocument12 pagesB BKZ Hyd Il 2 Cfrank_grimesNo ratings yet
- Lecture 2 PDFDocument56 pagesLecture 2 PDFfrank_grimesNo ratings yet
- Unit 6: Equations of Lines and Planes: Solutions Block 1:vector ArithmeticDocument27 pagesUnit 6: Equations of Lines and Planes: Solutions Block 1:vector Arithmeticfrank_grimesNo ratings yet
- Memoria Flash SST25VF032BDocument33 pagesMemoria Flash SST25VF032Bfrank_grimesNo ratings yet
- DSDocument18 pagesDSrojo_32100% (1)
- Constants FormulasDocument1 pageConstants FormulasMensajes De Texto GratisNo ratings yet
- Garnet TutorialDocument42 pagesGarnet Tutorialfrank_grimesNo ratings yet
- MITRES 18 007 Parti Lec01 PDFDocument15 pagesMITRES 18 007 Parti Lec01 PDFfrank_grimesNo ratings yet
- Structure: Study Guide Block 1:vector ArithmeticDocument6 pagesStructure: Study Guide Block 1:vector Arithmeticfrank_grimesNo ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocument12 pagesMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesNo ratings yet
- B BKZ Hyd Il 2 CDocument12 pagesB BKZ Hyd Il 2 Cfrank_grimesNo ratings yet
- B BKZ Hyd Il 2 CDocument12 pagesB BKZ Hyd Il 2 Cfrank_grimesNo ratings yet
- File 1394536498Document8 pagesFile 1394536498ismarlinNo ratings yet
- ARGtek POWER KING STATION QIGDocument16 pagesARGtek POWER KING STATION QIGPriyo SanyotoNo ratings yet
- Online Bus ReservationDocument30 pagesOnline Bus Reservationvedika33% (6)
- Advanced Computer Systems Architecture Lect-1Document31 pagesAdvanced Computer Systems Architecture Lect-1HussainShabbirNo ratings yet
- Anr 6.02 (60200005) 20220315 203610 3714522296Document8 pagesAnr 6.02 (60200005) 20220315 203610 3714522296EcaNo ratings yet
- Install OMV On Iomega HMNHD Cloud Edition With Disk Image - v05Document4 pagesInstall OMV On Iomega HMNHD Cloud Edition With Disk Image - v05KApps KAppsNo ratings yet
- Photoprint ManualDocument166 pagesPhotoprint ManualJose Lopez SNo ratings yet
- CompTIA Aplus Training Kit Exam 220-801 and Exam 220-802 V413HAVDocument1,026 pagesCompTIA Aplus Training Kit Exam 220-801 and Exam 220-802 V413HAVJennifer Rylie0% (1)
- GSM PRD BA.50 v5.0 Technology Neutral Agreements HandbookDocument36 pagesGSM PRD BA.50 v5.0 Technology Neutral Agreements HandbookBrimstone HideNo ratings yet
- Thinkcentre m710t TowerDocument1 pageThinkcentre m710t Towerchristian2506No ratings yet
- ALC650 Datasheet PDFDocument46 pagesALC650 Datasheet PDFPedro Ruiz GomezNo ratings yet
- Penetration Testing: A Roadmap To Network SecurityDocument4 pagesPenetration Testing: A Roadmap To Network SecurityMont AlNo ratings yet
- Access and Authentication Control: Slide 8-1Document32 pagesAccess and Authentication Control: Slide 8-1andyNo ratings yet
- 7934-Bwidth-Consume Inglés PDFDocument8 pages7934-Bwidth-Consume Inglés PDFSergio OssaNo ratings yet
- Robert N. Cahn - Semi-Simple Lie Algebras and Their Representations-Dover Publications (2006)Document116 pagesRobert N. Cahn - Semi-Simple Lie Algebras and Their Representations-Dover Publications (2006)smashdwarfNo ratings yet
- Widyasmoro pengantarSinyalSistem2017Document43 pagesWidyasmoro pengantarSinyalSistem2017bramNo ratings yet
- TimeMachine User ManualDocument8 pagesTimeMachine User ManualMihai si atatNo ratings yet
- CDMA RF Performance Analysis & Troubleshooting Guide R28.0 - FinalDocument191 pagesCDMA RF Performance Analysis & Troubleshooting Guide R28.0 - FinalSarathy ParthaNo ratings yet
- Alcatel Lucent 9412 eNodeB Compact PDFDocument2 pagesAlcatel Lucent 9412 eNodeB Compact PDFBijaya RanaNo ratings yet
- CompoundDocument4 pagesCompounduscrNo ratings yet
- Axon Getting StartedDocument9 pagesAxon Getting Startedmpetit12No ratings yet
- PCB Reverse EngineeringDocument2 pagesPCB Reverse Engineeringbill1022No ratings yet
- Leaflet Dahua Smart Digital Signage 201906 (2P)Document2 pagesLeaflet Dahua Smart Digital Signage 201906 (2P)lucky zorroNo ratings yet
- Rajib Mall Lecture NotesDocument74 pagesRajib Mall Lecture NotesAnuj NagpalNo ratings yet
- 2 CPU SchedulingDocument11 pages2 CPU SchedulingAdesh Kumar chaturvediNo ratings yet
- Deleting Assignments From FSXDocument5 pagesDeleting Assignments From FSXjackNo ratings yet
- FFIEC CAT May 2017 Inherent Risk ProfileDocument8 pagesFFIEC CAT May 2017 Inherent Risk ProfileJennifer DiazNo ratings yet
- Guia Rapida de InstalacionDocument32 pagesGuia Rapida de InstalacionDario Campos AlcantaraNo ratings yet
- MM 1010Document3 pagesMM 1010Pasindu PriyankaraNo ratings yet
- Simplified Datasheet For EX900 M.2 EN PDFDocument2 pagesSimplified Datasheet For EX900 M.2 EN PDFWyler Gamarra LeonNo ratings yet