You might also like
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Single Phase Induction Motor Speed ControlDocument35 pagesSingle Phase Induction Motor Speed ControlHarshit Sengar100% (2)
- Single Phase PWM InverterDocument11 pagesSingle Phase PWM InverterFoom A. Alshekh100% (2)
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- Implementation of V/F Control of Three Phase Induction Motor Using MicrocontrollerDocument60 pagesImplementation of V/F Control of Three Phase Induction Motor Using MicrocontrollerS Karan Nagar100% (4)
- Single Phase SPWM InverterDocument46 pagesSingle Phase SPWM Inverternitin aryaNo ratings yet
- Exp 9 Boost ConverterDocument8 pagesExp 9 Boost ConverterusmpowerlabNo ratings yet
- 3 Phase Cascaded H-Bridge InverterDocument7 pages3 Phase Cascaded H-Bridge InverterAnil ShahNo ratings yet
- 10 InvertersDocument136 pages10 InverterszapzahtNo ratings yet
- SPWM Inverter DownloadDocument2 pagesSPWM Inverter DownloadSebastian ArboledaNo ratings yet
- BLDCDocument4 pagesBLDCsathishNo ratings yet
- DC Motor Speed Control Using C++Document77 pagesDC Motor Speed Control Using C++eraditya2001100% (11)
- Microcontroller Based Three Phase InverterDocument4 pagesMicrocontroller Based Three Phase InverterEditor IJRITCCNo ratings yet
- DCpower SuplyDocument12 pagesDCpower Suplymm30973097No ratings yet
- 3 Line ConverterDocument10 pages3 Line ConverterJay Romar PabianiaNo ratings yet
- Simulation of Single Phase Inverter Using PSIM Software For Solar P.V. System Give Constant Output Voltage at Different Solar RadiationDocument6 pagesSimulation of Single Phase Inverter Using PSIM Software For Solar P.V. System Give Constant Output Voltage at Different Solar Radiationkk_kamalakkannanNo ratings yet
- Designing Planar Magnetics DixonDocument26 pagesDesigning Planar Magnetics Dixonarulsrini77No ratings yet
- Brown Final PPT FinalDocument36 pagesBrown Final PPT FinalDarshan100% (2)
- SPWMDocument16 pagesSPWMSatyanarayana GurramNo ratings yet
- BLDC SimulationDocument4 pagesBLDC SimulationSiva GuruNo ratings yet
- Electrical Power ProjectDocument12 pagesElectrical Power ProjectsrnkaNo ratings yet
- A Three Phase Induction Motor Is Basically A Constant Speed Motor So ItDocument39 pagesA Three Phase Induction Motor Is Basically A Constant Speed Motor So ItManish MakwanaNo ratings yet
- Three Phase InverterDocument5 pagesThree Phase Inverternizom90No ratings yet
- Circuit Simulation of A BLDC MotorDocument4 pagesCircuit Simulation of A BLDC MotorjpmacabascoNo ratings yet
- Sine Wave Generation and Implementation Using DsPIC33FJDocument27 pagesSine Wave Generation and Implementation Using DsPIC33FJpaaraib100% (1)
- Modelling and Simulation of Closed Loop BLDC Motor ControlDocument30 pagesModelling and Simulation of Closed Loop BLDC Motor Controlaarya5No ratings yet
- GTO RectifierDocument13 pagesGTO RectifierBijay PoudelNo ratings yet
- Power Electronics Final Year EEE Projects 2018 2019Document16 pagesPower Electronics Final Year EEE Projects 2018 2019PannerNo ratings yet
- Modelling and Simuation of BLDC Motor in MATLAB GUIDocument5 pagesModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardNo ratings yet
- Analysis of Single-Phase SPWM Inverter: Sandeep PhogatDocument6 pagesAnalysis of Single-Phase SPWM Inverter: Sandeep PhogatPraneeth MutnuruNo ratings yet
- BLDCDocument4 pagesBLDCmechtex Pvt LtdNo ratings yet
- 3phase Induction MotorDocument74 pages3phase Induction MotorFuture TechnovationNo ratings yet
- DC-DC ConverterDocument24 pagesDC-DC ConverterkandularanjithNo ratings yet
- Chapter 1 DC Drives Part1Document46 pagesChapter 1 DC Drives Part1Mohammad MunzirNo ratings yet
- Matlab Simulink Model of Sinusoidal PWM For Three-Phase Voltage Source InverterDocument3 pagesMatlab Simulink Model of Sinusoidal PWM For Three-Phase Voltage Source InverterEditor IJTSRDNo ratings yet
- Washing Machine Control Using 8051 MicrocontrollerDocument4 pagesWashing Machine Control Using 8051 MicrocontrollerPrasath MurugesanNo ratings yet
- BLDC ControlDocument16 pagesBLDC ControlSaurabh DashNo ratings yet
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsDocument12 pagesDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmeNo ratings yet
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDNo ratings yet
- Design & Implementation of Cost Effective Automatic Transfer SwitchDocument10 pagesDesign & Implementation of Cost Effective Automatic Transfer SwitchAdeel ArshadNo ratings yet
- PROJCTDocument32 pagesPROJCTSwati Agarwal100% (1)
- Speed Control of Induction Motor by Using IR11Document16 pagesSpeed Control of Induction Motor by Using IR11Anuj TripathiNo ratings yet
- Topology Investigation For Front End DC-DC Power Conversion For Distributed Power SystemDocument332 pagesTopology Investigation For Front End DC-DC Power Conversion For Distributed Power Systemwouter81100% (4)
- Axial Flux MotorDocument7 pagesAxial Flux MotorMirant ParikhNo ratings yet
- Models For A Stand-Alone PV SystemDocument78 pagesModels For A Stand-Alone PV Systemcristian2388No ratings yet
- Motor Control DesignDocument6 pagesMotor Control Designkarthik16eeeNo ratings yet
- Design and Contruction of Automatic Phase Selector PDFDocument51 pagesDesign and Contruction of Automatic Phase Selector PDFKadiri IbrahimNo ratings yet
- Chapter 1 DC Drives Part2Document75 pagesChapter 1 DC Drives Part2Mohammad MunzirNo ratings yet
- DC Machine SimulationDocument12 pagesDC Machine Simulationkiranch219No ratings yet
- Closed Loop Control of Stepper Motor Without Position SensorDocument9 pagesClosed Loop Control of Stepper Motor Without Position SensorlamushkNo ratings yet
- Invertere ProjectDocument71 pagesInvertere ProjectChandan Singh100% (1)
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- CDKR Web v0.2rcDocument3 pagesCDKR Web v0.2rcAGUSTIN SEVERINONo ratings yet
- A PDFDocument2 pagesA PDFKanimozhi CheranNo ratings yet
- Process States in Operating SystemDocument4 pagesProcess States in Operating SystemKushal Roy ChowdhuryNo ratings yet
- 2021S-EPM 1163 - Day-11-Unit-8 ProcMgmt-AODADocument13 pages2021S-EPM 1163 - Day-11-Unit-8 ProcMgmt-AODAehsan ershadNo ratings yet
- Marine Lifting and Lashing HandbookDocument96 pagesMarine Lifting and Lashing HandbookAmrit Raja100% (1)
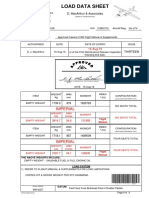
- Load Data Sheet: ImperialDocument3 pagesLoad Data Sheet: ImperialLaurean Cub BlankNo ratings yet
- Walmart, Amazon, EbayDocument2 pagesWalmart, Amazon, EbayRELAKU GMAILNo ratings yet
- United Nations Economic and Social CouncilDocument3 pagesUnited Nations Economic and Social CouncilLuke SmithNo ratings yet
- Peoria County Jail Booking Sheet For Oct. 7, 2016Document6 pagesPeoria County Jail Booking Sheet For Oct. 7, 2016Journal Star police documents50% (2)
- RevisionHistory APFIFF33 To V219Document12 pagesRevisionHistory APFIFF33 To V219younesNo ratings yet
- Polytropic Process1Document4 pagesPolytropic Process1Manash SinghaNo ratings yet
- Business Environment Analysis - Saudi ArabiaDocument24 pagesBusiness Environment Analysis - Saudi ArabiaAmlan JenaNo ratings yet
- Aluminum 3003-H112: Metal Nonferrous Metal Aluminum Alloy 3000 Series Aluminum AlloyDocument2 pagesAluminum 3003-H112: Metal Nonferrous Metal Aluminum Alloy 3000 Series Aluminum AlloyJoachim MausolfNo ratings yet
- Address MappingDocument26 pagesAddress MappingLokesh KumarNo ratings yet
- Online Learning Interactions During The Level I Covid-19 Pandemic Community Activity Restriction: What Are The Important Determinants and Complaints?Document16 pagesOnline Learning Interactions During The Level I Covid-19 Pandemic Community Activity Restriction: What Are The Important Determinants and Complaints?Maulana Adhi Setyo NugrohoNo ratings yet
- Engineering Management (Final Exam)Document2 pagesEngineering Management (Final Exam)Efryl Ann de GuzmanNo ratings yet
- G.R. No. 185449, November 12, 2014 Del Castillo Digest By: DOLARDocument2 pagesG.R. No. 185449, November 12, 2014 Del Castillo Digest By: DOLARTheodore DolarNo ratings yet
- Linux For Beginners - Shane BlackDocument165 pagesLinux For Beginners - Shane BlackQuod Antichristus100% (1)
- Reference Template For Feasibility Study of PLTS (English)Document4 pagesReference Template For Feasibility Study of PLTS (English)Herikson TambunanNo ratings yet
- 90FF1DC58987 PDFDocument9 pages90FF1DC58987 PDFfanta tasfayeNo ratings yet
- Strobostomp HD™ Owner'S Instruction Manual V1.1 En: 9V DC Regulated 85maDocument2 pagesStrobostomp HD™ Owner'S Instruction Manual V1.1 En: 9V DC Regulated 85maShane FairchildNo ratings yet
- Aitt Feb 2017 TH Sem IIIDocument6 pagesAitt Feb 2017 TH Sem IIIMadhu KumarNo ratings yet
- Enerparc - India - Company Profile - September 23Document15 pagesEnerparc - India - Company Profile - September 23AlokNo ratings yet
- Lactobacillus Acidophilus - Wikipedia, The Free EncyclopediaDocument5 pagesLactobacillus Acidophilus - Wikipedia, The Free Encyclopediahlkjhlkjhlhkj100% (1)
- ICSI-Admit-Card (1) - 230531 - 163936Document17 pagesICSI-Admit-Card (1) - 230531 - 163936SanjayNo ratings yet
- Electrical ConnectorsDocument5 pagesElectrical ConnectorsRodrigo SantibañezNo ratings yet
- CANELA Learning Activity - NSPE Code of EthicsDocument4 pagesCANELA Learning Activity - NSPE Code of EthicsChristian CanelaNo ratings yet
- Cs8792 Cns Unit 1Document35 pagesCs8792 Cns Unit 1Manikandan JNo ratings yet
- Kaitlyn LabrecqueDocument15 pagesKaitlyn LabrecqueAmanda SimpsonNo ratings yet
- Lab Session 7: Load Flow Analysis Ofa Power System Using Gauss Seidel Method in MatlabDocument7 pagesLab Session 7: Load Flow Analysis Ofa Power System Using Gauss Seidel Method in MatlabHayat AnsariNo ratings yet