You might also like
- VDE-AR-N 4105:2011-08 Power Generation Systems Connected To The Low-Voltage Distribution NetworkDocument7 pagesVDE-AR-N 4105:2011-08 Power Generation Systems Connected To The Low-Voltage Distribution NetworkSumon Dhara0% (1)
- Tutorial - Diode Model With Reverse RecoveryDocument5 pagesTutorial - Diode Model With Reverse RecoveryEngineers GalleryNo ratings yet
- A Systematic Method For Designing A PR ControllerDocument22 pagesA Systematic Method For Designing A PR ControllerSumon DharaNo ratings yet
- 117 1014 1 PBDocument9 pages117 1014 1 PBChithrailingam PerumalNo ratings yet
- Adv Power ElectronicsDocument5 pagesAdv Power ElectronicsSumon DharaNo ratings yet
- Draft Syllabus For Electronics and Communication Engineering PDFDocument8 pagesDraft Syllabus For Electronics and Communication Engineering PDFSumon DharaNo ratings yet
- Big-O AlgorithmDocument10 pagesBig-O AlgorithmSumon DharaNo ratings yet
- State Space Representation of Transfer Function SystemsDocument5 pagesState Space Representation of Transfer Function SystemsIvan VillanevaNo ratings yet
- Ti Wokshop BLINK ORGDocument2 pagesTi Wokshop BLINK ORGSumon DharaNo ratings yet
- LimericksDocument1 pageLimericksSumon DharaNo ratings yet
- Precision Programmable Reference: FeaturesDocument30 pagesPrecision Programmable Reference: FeaturesSumon DharaNo ratings yet
- Appnote 9Document19 pagesAppnote 9miqueasalvarez240111No ratings yet
- Brushless DC Motors Are A Type of Synchronous MotorDocument16 pagesBrushless DC Motors Are A Type of Synchronous MotorGanesh Kumar ArumugamNo ratings yet
- Controller For Switchede Luctance MotorDocument74 pagesController For Switchede Luctance MotorakkarapakaanandaNo ratings yet
- 016601Document10 pages016601Sumon DharaNo ratings yet
- MPPT Solar and Wind Power Boost Charge Controller - OpenCircuits PDFDocument6 pagesMPPT Solar and Wind Power Boost Charge Controller - OpenCircuits PDFSumon Dhara100% (1)
- P 614005Document5 pagesP 614005Sumon DharaNo ratings yet
- WWW - Srmuniv.ac - in Sites Default Files Files Power Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Document69 pagesWWW - Srmuniv.ac - in Sites Default Files Files Power Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Sumon DharaNo ratings yet
- PG-Courses in The Electrical Engineering DepartmentDocument24 pagesPG-Courses in The Electrical Engineering DepartmentSumon DharaNo ratings yet
- MoU Signed Euphrates PDFDocument12 pagesMoU Signed Euphrates PDFSumon DharaNo ratings yet
- Base PaperDocument12 pagesBase PaperSumon DharaNo ratings yet
- High Frequency Induction HeatingDocument22 pagesHigh Frequency Induction HeatingSumon DharaNo ratings yet
- In HouseFee Details PG-PHD 2014admits1 PDFDocument1 pageIn HouseFee Details PG-PHD 2014admits1 PDFSumon DharaNo ratings yet
- C 2xx D SP C P U and Instruction SetDocument1 pageC 2xx D SP C P U and Instruction SetSumon DharaNo ratings yet
- MagneticsDocument18 pagesMagneticsSumon DharaNo ratings yet
- White Paper: Optical-Based Analog Front End For Low - Speed Powerline Communications in The HomeDocument5 pagesWhite Paper: Optical-Based Analog Front End For Low - Speed Powerline Communications in The HomeSumon DharaNo ratings yet
- Maximum Gate MarksDocument1 pageMaximum Gate MarksSumon DharaNo ratings yet
- August 2013Document3 pagesAugust 2013Sumon DharaNo ratings yet
- Matlab Programming, IO, and stringsDocument18 pagesMatlab Programming, IO, and stringsSumon DharaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Servo Motor Speed and Direction ControlDocument7 pagesServo Motor Speed and Direction Controltazeb100% (1)
- Dual Full Bridge DriversDocument53 pagesDual Full Bridge DriversherlianajayaNo ratings yet
- Review Paper On Vehicle Diagnosis With Electronic Control UnitDocument7 pagesReview Paper On Vehicle Diagnosis With Electronic Control UnitInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Controls L M v3.4 Certified Remote I/O ModulesDocument4 pagesControls L M v3.4 Certified Remote I/O ModulesAlberto Suazo BasaezNo ratings yet
- 6 - 2021 - 7-Implementation of Quasi Z-Source Inverter For Renewable EnergyDocument6 pages6 - 2021 - 7-Implementation of Quasi Z-Source Inverter For Renewable EnergySai RameshNo ratings yet
- EDN Design Ideas 2009Document144 pagesEDN Design Ideas 2009yewie561No ratings yet
- PDF Sanken 882276Document13 pagesPDF Sanken 882276Moises CelosoNo ratings yet
- Kelly Ebike Brushless Motor Controller User Manual GuideDocument8 pagesKelly Ebike Brushless Motor Controller User Manual GuideAlonso LamusNo ratings yet
- Theremino HAL - V8.x Instructions: SystemDocument35 pagesTheremino HAL - V8.x Instructions: SystemN TNo ratings yet
- PID Control ArdunioDocument8 pagesPID Control ArdunioSyed Abdul Haseeb AhmedNo ratings yet
- On Solving The Kinematics and Controlling of Origami Box-Shaped RobotsDocument13 pagesOn Solving The Kinematics and Controlling of Origami Box-Shaped RobotsIAES International Journal of Robotics and AutomationNo ratings yet
- MC56F8013Document126 pagesMC56F8013ricardo duarteNo ratings yet
- IEEE 2014 - 2015 Matlab Simulink Power Electronics Projects Hosur Bangalore Mysore Mangalore KarnatakaDocument23 pagesIEEE 2014 - 2015 Matlab Simulink Power Electronics Projects Hosur Bangalore Mysore Mangalore Karnatakaieeeprojects100% (1)
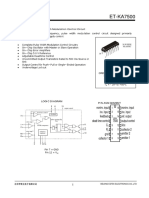
- Pulse Width Modulation Control Circuit Technical SpecificationsDocument4 pagesPulse Width Modulation Control Circuit Technical SpecificationsManutenção FNNo ratings yet
- DRV 11873Document28 pagesDRV 11873Kumari MugilanNo ratings yet
- Systellar Innovations - Solar Charge Controller - PWM HybridDocument7 pagesSystellar Innovations - Solar Charge Controller - PWM HybridBittuKmrNo ratings yet
- 1 Comparison - of - Traditional - Inverters - and - Z - Source - Inverter - For - Fuel - Cell - VehiclesDocument11 pages1 Comparison - of - Traditional - Inverters - and - Z - Source - Inverter - For - Fuel - Cell - Vehiclesramoha2514No ratings yet
- Digital Frequency Inverter ManualDocument60 pagesDigital Frequency Inverter ManualRonald Peeters0% (1)
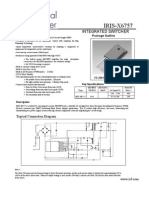
- IRIS-X6757: FeaturesDocument10 pagesIRIS-X6757: Featuresmiguel angel jaramilloNo ratings yet
- Make This Electric Scooter/Rickshaw CircuitDocument25 pagesMake This Electric Scooter/Rickshaw CircuitAnantha KeshavaNo ratings yet
- Infineon ICE5ARxxxxBZS DS v02 - 10 EN PDFDocument36 pagesInfineon ICE5ARxxxxBZS DS v02 - 10 EN PDFanand shekhawatNo ratings yet
- 3-DOF-Scara-Robot-Thesis Đ ÁnDocument35 pages3-DOF-Scara-Robot-Thesis Đ ÁnXuân BảoNo ratings yet
- STM32Cube Firmware ExamplesDocument31 pagesSTM32Cube Firmware ExamplescansuNo ratings yet
- Glentek SMA8115 SMA8215 SMA8315 ManualDocument80 pagesGlentek SMA8115 SMA8215 SMA8315 ManualYaseen JamilNo ratings yet
- Cuiqing Du PH DDocument130 pagesCuiqing Du PH DAnonymous rTRz30fNo ratings yet
- Development of A Step-Up Converter For A PV System: (Elec5510 - Practical Laboratory Session 1)Document23 pagesDevelopment of A Step-Up Converter For A PV System: (Elec5510 - Practical Laboratory Session 1)oopeoluwa_1No ratings yet
- Is Now Part ofDocument25 pagesIs Now Part ofkilowatt СкворцовNo ratings yet
- Lebm7301 04 PDFDocument94 pagesLebm7301 04 PDFVictor Nunez100% (1)
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.03XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.03XE Range Is 0.50mS To 2.50mSmici bereNo ratings yet
- M.E. Power Electronics and Drives Anna University Syllabus Reg 2021Document31 pagesM.E. Power Electronics and Drives Anna University Syllabus Reg 2021Daniel LakNo ratings yet