You might also like
- Civil Aviation ActDocument9 pagesCivil Aviation ActKrishna GhimireNo ratings yet
- Security Rule 2073 - NepaliDocument46 pagesSecurity Rule 2073 - NepaliKrishna GhimireNo ratings yet
- Bimansthal Sewa Sulka 2067Document47 pagesBimansthal Sewa Sulka 2067sk sharmaNo ratings yet
- Enta ds8Document4 pagesEnta ds8Krishna GhimireNo ratings yet
- Policy Legal and RegulatoryDocument4 pagesPolicy Legal and RegulatoryKrishna Ghimire100% (1)
- Hawai Niti 2063Document18 pagesHawai Niti 2063Nal Bikram ThapaNo ratings yet
- Security Rule 2073 - NepaliDocument46 pagesSecurity Rule 2073 - NepaliKrishna GhimireNo ratings yet
- NTP100GPS Data SheetDocument1 pageNTP100GPS Data SheetKrishna GhimireNo ratings yet
- Hawai Niti 2063Document18 pagesHawai Niti 2063Nal Bikram ThapaNo ratings yet
- 14th Plan Full Document PDFDocument398 pages14th Plan Full Document PDFRishi Ram DangiNo ratings yet
- System Models in Software Engineering Se7 8024Document43 pagesSystem Models in Software Engineering Se7 8024Krishna GhimireNo ratings yet
- 6560 20c OrdDocument30 pages6560 20c OrdKrishna GhimireNo ratings yet
- IlsDocument14 pagesIlsJose Mauro GarciaNo ratings yet
- VCS-4G Bro en 5214-5010-12 v0600Document20 pagesVCS-4G Bro en 5214-5010-12 v0600Krishna GhimireNo ratings yet
- PIN PowerSupplies en - 50133083 - 144dpiDocument6 pagesPIN PowerSupplies en - 50133083 - 144dpiKrishna GhimireNo ratings yet
- Technical Handbook 1kW DME STATION LDB-102Document882 pagesTechnical Handbook 1kW DME STATION LDB-102Krishna Ghimire75% (4)
- Nepal Civil Aviation Authority recruitment exam syllabusDocument7 pagesNepal Civil Aviation Authority recruitment exam syllabusKrishna GhimireNo ratings yet
- Elect Pdfn to Lead Dynamic MunicipalityDocument1 pageElect Pdfn to Lead Dynamic MunicipalityKrishna GhimireNo ratings yet
- Radio Eng-7Document5 pagesRadio Eng-7Krishna GhimireNo ratings yet
- Exam Schedule 072 CAANDocument1 pageExam Schedule 072 CAANKrishna GhimireNo ratings yet
- Pelr For AtsepDocument33 pagesPelr For AtsepKrishna GhimireNo ratings yet
- Mode S Elementary Surveillance (ELS) : FunctionalityDocument3 pagesMode S Elementary Surveillance (ELS) : FunctionalityKrishna GhimireNo ratings yet
- Improve AM FM Reception TipsDocument3 pagesImprove AM FM Reception TipsKrishna Ghimire100% (1)
- Microwave Landing System - MLSDocument5 pagesMicrowave Landing System - MLSKrishna Ghimire100% (1)
- Ce CB CC ConfigurationDocument4 pagesCe CB CC ConfigurationKrishna GhimireNo ratings yet
- ATSEP System Equipment Rating Training Edition 3 (1) .0Document28 pagesATSEP System Equipment Rating Training Edition 3 (1) .0Krishna GhimireNo ratings yet
- E & T Com - 5Document4 pagesE & T Com - 5मेनसन लाखेमरूNo ratings yet
- Dur Sanchar PolicyDocument13 pagesDur Sanchar PolicyKrishna GhimireNo ratings yet
- CAAN Act 2053Document14 pagesCAAN Act 2053ameerraiNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- EE705 Project ReportDocument11 pagesEE705 Project ReportAayush ShrivastavaNo ratings yet
- F15 CIT - Data Sheet - WebDocument2 pagesF15 CIT - Data Sheet - WebfdghNo ratings yet
- Product Specifications: VHLP1 18 3GRDocument4 pagesProduct Specifications: VHLP1 18 3GRmdisicNo ratings yet
- LP DW Ubiquiti Di-Abril 13Document5 pagesLP DW Ubiquiti Di-Abril 13Freling R. Ramirez BautistaNo ratings yet
- Design and Analysis of Analog Filters PDFDocument453 pagesDesign and Analysis of Analog Filters PDFselaroth168No ratings yet
- NOMA-based CR for QAMDocument5 pagesNOMA-based CR for QAMashish jhaNo ratings yet
- DWT PracticeDocument4 pagesDWT PracticeBinay PrasadNo ratings yet
- USB Audio Software Design GuideDocument92 pagesUSB Audio Software Design GuidevduckNo ratings yet
- Laser LinkDocument2 pagesLaser LinkRaziel VelazquezNo ratings yet
- HomePlug Green PHY Whitepaper 100614Document17 pagesHomePlug Green PHY Whitepaper 100614Setyo Wahyu TomoNo ratings yet
- Comparison of W-CDMA and Cdma2000Document12 pagesComparison of W-CDMA and Cdma2000AhmadFirdaus Bin HolidyRasyidNo ratings yet
- Vehicle To Infrastructure Communication Different Methods and Technologies Used For ItDocument3 pagesVehicle To Infrastructure Communication Different Methods and Technologies Used For ItBargavi SrinivasNo ratings yet
- RTN 300 V100R019C10 Feature Configuration Guide 01Document353 pagesRTN 300 V100R019C10 Feature Configuration Guide 01Juan Pablo CharrisNo ratings yet
- Max Power (Watt) Max Power (DBM) Frequency BandDocument3 pagesMax Power (Watt) Max Power (DBM) Frequency BandArwanto CahyaNo ratings yet
- Spread Spectrum TechniquesDocument17 pagesSpread Spectrum Techniquesramjee26No ratings yet
- Speech Signal AnalysisDocument11 pagesSpeech Signal AnalysisHemanth PillaNo ratings yet
- GMDSS Sea AreasDocument2 pagesGMDSS Sea AreasIMI DNS 20100% (1)
- DsPIC SW Receiver Rev1.1Document7 pagesDsPIC SW Receiver Rev1.1ngt881No ratings yet
- Line CodingDocument66 pagesLine CodingDeepak SalianNo ratings yet
- Flanker Radars in Beyond Visual Range Air CombatDocument57 pagesFlanker Radars in Beyond Visual Range Air CombathailemeamanuelNo ratings yet
- Radios WebDocument3 pagesRadios WebEmanuel PaironeNo ratings yet
- Novel Schiffman Phase Shifters Using Coupled LinesDocument6 pagesNovel Schiffman Phase Shifters Using Coupled LinesSonia BaciNo ratings yet
- 78 50 PDFDocument1 page78 50 PDFdan r.No ratings yet
- SAILOR 6000 MF-HF 150-250-500W Installation Manual 98-130890-CDocument80 pagesSAILOR 6000 MF-HF 150-250-500W Installation Manual 98-130890-CBeneDict Ben D100% (1)
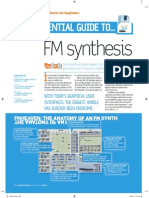
- The Essential Guide To... : FM SynthesisDocument2 pagesThe Essential Guide To... : FM SynthesisdradetoxNo ratings yet
- PDM 10Document10 pagesPDM 10Rober ChicoNo ratings yet
- Master Mods Volume 1Document76 pagesMaster Mods Volume 1John "BiggyJ" Dumas83% (6)
- Turbo Codes For Multi-Gbps Coherent Optical CommunicationsDocument2 pagesTurbo Codes For Multi-Gbps Coherent Optical CommunicationsChaima BelhediNo ratings yet
- MLX90360 Datasheet MelexisDocument35 pagesMLX90360 Datasheet MelexissdfsdfNo ratings yet
- Cartas Navegacion AcapulcoDocument15 pagesCartas Navegacion Acapulcowillycoyote1990-1100% (1)