You might also like
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Speed Control of Induction Motor PDFDocument12 pagesSpeed Control of Induction Motor PDFbalaer05No ratings yet
- Speed Control 2Document2 pagesSpeed Control 2clinthen100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- 8 Speed Control of Induction MachinesDocument2 pages8 Speed Control of Induction MachinesclinthenNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Three-Phase Induction MotorDocument21 pagesThree-Phase Induction MotorGovel EzraNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Massachusetts Institute of TechnologyDocument12 pagesMassachusetts Institute of TechnologyPrakhar PandeyNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Induction Machines: Torque Speed CharacteristicsDocument22 pagesInduction Machines: Torque Speed CharacteristicsGogioman Myhay100% (1)
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Computational Modeling of The Squirrel-Cage Induction Motor Starting ProcessDocument5 pagesComputational Modeling of The Squirrel-Cage Induction Motor Starting ProcessAlwin RsNo ratings yet
- Induction Motor For Crane ApplicationDocument5 pagesInduction Motor For Crane ApplicationPankaj KumarNo ratings yet
- Sensorless Control of Permanent Magnet Synchronous Motor With Stator Flux EstimationDocument5 pagesSensorless Control of Permanent Magnet Synchronous Motor With Stator Flux EstimationPhước Linh TrầnNo ratings yet
- 4613 ReportDocument35 pages4613 ReportRUNLIN MA100% (1)
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDocument13 pagesIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimNo ratings yet
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeeNo ratings yet
- A CD Rive Final StrategyDocument4 pagesA CD Rive Final Strategyjiwani87No ratings yet
- Task 4: Figure 1 Speed-Torque Curve For Ideal DC MotorDocument19 pagesTask 4: Figure 1 Speed-Torque Curve For Ideal DC MotoraqeelNo ratings yet
- Letters: Accurate Steady-State Representation of A Doubly Fed Induction MachineDocument6 pagesLetters: Accurate Steady-State Representation of A Doubly Fed Induction MachineAmy Leigh WilliamsNo ratings yet
- Induction Motors: The Concept of Rotor SlipDocument12 pagesInduction Motors: The Concept of Rotor Sliphafiz_jaaffarNo ratings yet
- NoncompleteDocument8 pagesNoncompleteعمر تاليونNo ratings yet
- Induction Motor Equivalent Circuit For Dynamic SimulationDocument6 pagesInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822No ratings yet
- Induction Motor Design Using FEMMDocument13 pagesInduction Motor Design Using FEMMJunaid AhmadNo ratings yet
- RBT Lab Manuval 11E608 CEDocument106 pagesRBT Lab Manuval 11E608 CEnandhakumarmeNo ratings yet
- Lecture 4 - Electrical Drives of Machine ToolsDocument44 pagesLecture 4 - Electrical Drives of Machine ToolsMovie 6890No ratings yet
- Doubly Fed Induction Generator For Wind TurbinesDocument21 pagesDoubly Fed Induction Generator For Wind TurbinesAdarsh KailashNo ratings yet
- Simulating A DC DC Boost Converter Using Matlab Part 2Document13 pagesSimulating A DC DC Boost Converter Using Matlab Part 2electrotehnica0% (2)
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNo ratings yet
- Speed Control of Induction Motors: Synchronous Speed Ns 120 F/PDocument6 pagesSpeed Control of Induction Motors: Synchronous Speed Ns 120 F/Pmohamed shalabyNo ratings yet
- Paper Title: Ajay Kumar Gudla and Saikat ChakrabartiDocument5 pagesPaper Title: Ajay Kumar Gudla and Saikat ChakrabartiAshutosh KumarNo ratings yet
- 03 2008 JA PS A 1 008 CleanDocument6 pages03 2008 JA PS A 1 008 CleanBentarfa IslamNo ratings yet
- 404 Vol. Reference Frame Analysis of A Slip Energy Recovery SystemDocument5 pages404 Vol. Reference Frame Analysis of A Slip Energy Recovery SystemApekshit BhowateNo ratings yet
- A Sensorless Robust Vector Control of Induction Motor DrivesDocument6 pagesA Sensorless Robust Vector Control of Induction Motor DrivesLava KumarNo ratings yet
- Eee2306 - Group - 4 - A.C - 3 - Phase - Induction - Motor PDFDocument8 pagesEee2306 - Group - 4 - A.C - 3 - Phase - Induction - Motor PDFLaaria ChrisNo ratings yet
- Review QuestionsDocument15 pagesReview QuestionsSuganthiVasanNo ratings yet
- High Performance Drive Systems - . - . - . .Document8 pagesHigh Performance Drive Systems - . - . - . .avi013No ratings yet
- Determining Rotor Leakage ReactanceDocument5 pagesDetermining Rotor Leakage ReactanceGaspar RodríguezNo ratings yet
- Induction MotorDocument10 pagesInduction Motoreng_mhassan1No ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- Chapter 5Document73 pagesChapter 5Niket GuptaNo ratings yet
- Implementation and Analysis of Microcontroller Based Soft Starters For Three Phase Induction MotorsDocument7 pagesImplementation and Analysis of Microcontroller Based Soft Starters For Three Phase Induction MotorsMega Firdausi NuzullaNo ratings yet
- Chapter Thirteen: DC Drives Using Controlled RectifiersDocument38 pagesChapter Thirteen: DC Drives Using Controlled Rectifiersyemane gebremichal100% (2)
- Lab Exercise Control of Electric Machines : Student: Stošić Dino Index Number: 0069051394Document13 pagesLab Exercise Control of Electric Machines : Student: Stošić Dino Index Number: 0069051394Hakuna MatataNo ratings yet
- Vibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsDocument8 pagesVibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsKaran ShahNo ratings yet
- 390 MotorDocument14 pages390 MotorAlex MoiseNo ratings yet
- Flux-Linkage OF: Characteristics Switc Reluc''I'Ance MotorDocument5 pagesFlux-Linkage OF: Characteristics Switc Reluc''I'Ance MotorGthulasi78No ratings yet
- Induction Motor Analysis For Start-Up ProtectionDocument11 pagesInduction Motor Analysis For Start-Up ProtectionAnonymous 1AAjd0No ratings yet
- Transient StabilityDocument16 pagesTransient StabilityRavi Kumar BanalaNo ratings yet
- Torque Speed CurveDocument4 pagesTorque Speed CurvehozipekNo ratings yet
- Three Phase Induction Motors 2018Document18 pagesThree Phase Induction Motors 2018phillipkeiron123No ratings yet
- Motor Torque CalculatorDocument4 pagesMotor Torque Calculatorddstone321No ratings yet
- Matlab Simulink Implementation of Switched Reluctance Motor With Direct Torque Control TechniqueDocument7 pagesMatlab Simulink Implementation of Switched Reluctance Motor With Direct Torque Control Techniquemarris09No ratings yet
- ConclusionDocument1 pageConclusionBridget GreenNo ratings yet
- Presentation 1Document21 pagesPresentation 1Bridget GreenNo ratings yet
- AcknowledgementDocument2 pagesAcknowledgementBridget GreenNo ratings yet
- Acknowledgement 1Document1 pageAcknowledgement 1Bridget GreenNo ratings yet
- Manual For Tig Portal RegistrationDocument2 pagesManual For Tig Portal RegistrationBridget GreenNo ratings yet
- GATE EE Vol-1 by KanodiaDocument53 pagesGATE EE Vol-1 by Kanodiavigneshnrynn67% (3)
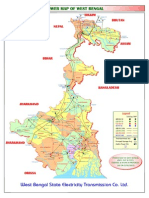
- Power MapDocument1 pagePower MapSaugato MondalNo ratings yet
- Africanamerican Scientists and InventorsDocument11 pagesAfricanamerican Scientists and InventorsBridget GreenNo ratings yet
- DR Alison Hooper PresentationDocument20 pagesDR Alison Hooper PresentationBridget GreenNo ratings yet
- Understanding A Political CartoonDocument8 pagesUnderstanding A Political CartoonBridget GreenNo ratings yet
- Prospectus 2013 01.08.2013Document18 pagesProspectus 2013 01.08.2013Bridget GreenNo ratings yet
- GATE 2013 Electrical Engineering Previous Year Paper PDFDocument20 pagesGATE 2013 Electrical Engineering Previous Year Paper PDFArif Hussain AlamNo ratings yet
- Control LectureDocument14 pagesControl LectureBridget Green100% (2)
- Java Lect 001Document12 pagesJava Lect 001hprasad316@gmail.comNo ratings yet