You might also like
- DSP Lab ManualDocument132 pagesDSP Lab ManualShahab JavedNo ratings yet
- Experiment 1: Objective: - Introduction With MATLAB Software and Plotting of General FunctionsDocument4 pagesExperiment 1: Objective: - Introduction With MATLAB Software and Plotting of General FunctionsAkshit SharmaNo ratings yet
- Digital Signal Processing Lab File: Name: Vatsal Agarwal Registration No:189202171Document35 pagesDigital Signal Processing Lab File: Name: Vatsal Agarwal Registration No:189202171Aman RoutrayNo ratings yet
- DSP Lab Basic Functions by RevanthDocument11 pagesDSP Lab Basic Functions by Revanthvenkata revanth arlaNo ratings yet
- DSP Lab ManualDocument57 pagesDSP Lab ManualRabia SamadNo ratings yet
- Svu Dsp-Lab - Manual-2Document54 pagesSvu Dsp-Lab - Manual-2GurusreenuNo ratings yet
- DSP Lab Manual For ECE 3 2 R09Document147 pagesDSP Lab Manual For ECE 3 2 R09Jandfor Tansfg Errott100% (2)
- DSP Lab Manual PerfectDocument139 pagesDSP Lab Manual PerfectSsgn Srinivasarao50% (2)
- DSP Lab Manual GEC Dahod 1Document40 pagesDSP Lab Manual GEC Dahod 1Tushar MhuskeyNo ratings yet
- DSP ManualDocument93 pagesDSP Manualiiecea 2122No ratings yet
- DSP Lab Manual - 15ecl57 - 2017Document112 pagesDSP Lab Manual - 15ecl57 - 2017Nisha TNo ratings yet
- MATLAB DT System Response ExperimentDocument25 pagesMATLAB DT System Response ExperimentSiddhasen PatilNo ratings yet
- MATLAB FundamentalsDocument7 pagesMATLAB FundamentalssanchitNo ratings yet
- MatlabDocument10 pagesMatlabAkhil RajuNo ratings yet
- Final Matlab (DSP Fyl) TOPDocument33 pagesFinal Matlab (DSP Fyl) TOPRajbir Saini SinghNo ratings yet
- Program 1 AimDocument23 pagesProgram 1 AimAshwani SachdevaNo ratings yet
- CSC567 - Lab 1 Introduction To MATLABDocument5 pagesCSC567 - Lab 1 Introduction To MATLABfeyrsNo ratings yet
- DSP Lab Manual PDFDocument51 pagesDSP Lab Manual PDFashok1683100% (1)
- Matlab 55MDocument252 pagesMatlab 55MNguyễn DuyNo ratings yet
- Lab 1Document11 pagesLab 1Rigor RempilloNo ratings yet
- Image ProcessingDocument36 pagesImage ProcessingTapasRoutNo ratings yet
- Digital Signal Processing ManualDocument106 pagesDigital Signal Processing Manual64emily64100% (1)
- Introduction To Matlab: Manaswi EN1 3 Year 6 SemDocument44 pagesIntroduction To Matlab: Manaswi EN1 3 Year 6 SemCharan MangipudyNo ratings yet
- Experiment No. 1 AIM:-To Study MATLAB Commands. THEORY:-MATLAB Is A High Performance Language For Technical ComputingDocument6 pagesExperiment No. 1 AIM:-To Study MATLAB Commands. THEORY:-MATLAB Is A High Performance Language For Technical ComputingKissan PortalNo ratings yet
- EC106 Advance Digital Signal Processing Lab Manual On Digital Signal ProcessingDocument69 pagesEC106 Advance Digital Signal Processing Lab Manual On Digital Signal ProcessingSHARAD FADADU0% (1)
- LAB ACTIVITY 1 - Introduction To MATLAB PART1Document19 pagesLAB ACTIVITY 1 - Introduction To MATLAB PART1Zedrik MojicaNo ratings yet
- MATLAB MATLAB Lab Manual Numerical Methods and MatlabDocument14 pagesMATLAB MATLAB Lab Manual Numerical Methods and MatlabJavaria Chiragh80% (5)
- Matlab Intro MarshDocument12 pagesMatlab Intro Marshlunatiko21No ratings yet
- Labs-TE Lab Manual DSPDocument67 pagesLabs-TE Lab Manual DSPAntony John BrittoNo ratings yet
- Introduction To Matlab + Mathematical Aspects of Bilinear Factor Models (PCA and PLS)Document113 pagesIntroduction To Matlab + Mathematical Aspects of Bilinear Factor Models (PCA and PLS)mppatilmayur1679No ratings yet
- DSP EditedDocument153 pagesDSP Editedjamnas176No ratings yet
- Appendix A MatlabTutorialDocument49 pagesAppendix A MatlabTutorialNick JohnsonNo ratings yet
- LabExercise 1 - Familiarization With MATLABDocument19 pagesLabExercise 1 - Familiarization With MATLABQueenie Rose PercilNo ratings yet
- Introdução Ao Matlab (Prof. Fessler - UMICH)Document4 pagesIntrodução Ao Matlab (Prof. Fessler - UMICH)João Paulo Man Kit SioNo ratings yet
- MATLAB Programming & Its Applications For Electrical EngineersDocument27 pagesMATLAB Programming & Its Applications For Electrical EngineersRohan SharmaNo ratings yet
- Lab 01Document8 pagesLab 01ALISHBA AZAMNo ratings yet
- 1 Pre-Lab: ELEC2201 Signals & Linear Systems MDocument7 pages1 Pre-Lab: ELEC2201 Signals & Linear Systems MPhilip SalmonyNo ratings yet
- Project Signal System 2012Document17 pagesProject Signal System 2012Kurniawan Banumaxs NagaNo ratings yet
- Program No. 1: Table1.1: Matlab WindowDocument11 pagesProgram No. 1: Table1.1: Matlab WindowMoni SinghNo ratings yet
- Solution For DSP LabDocument5 pagesSolution For DSP LabVN TranNo ratings yet
- MATLAB Signal Generation and SamplingDocument3 pagesMATLAB Signal Generation and SamplingMNo ratings yet
- Getting Started With MATLAB - Part1Document15 pagesGetting Started With MATLAB - Part1Rav ChumberNo ratings yet
- EMI Lab Assignment Analyzing Signals Using MATLAB FunctionsDocument14 pagesEMI Lab Assignment Analyzing Signals Using MATLAB FunctionsUzair AshfaqNo ratings yet
- Instructors Name: Nurdal WatsujiDocument20 pagesInstructors Name: Nurdal WatsujiSems KrksNo ratings yet
- Lab01 Introduction To MatlabDocument7 pagesLab01 Introduction To MatlabSeyed SadeghNo ratings yet
- DIP Lab: Introduction To MATLAB: GoalDocument7 pagesDIP Lab: Introduction To MATLAB: GoalMohamed El-Mutasim El-FeelNo ratings yet
- Introduction To Matlab: Victoria Lapuerta Ana LaverónDocument46 pagesIntroduction To Matlab: Victoria Lapuerta Ana Laverónajitjk123No ratings yet
- Intro MatlabDocument112 pagesIntro MatlabVal SelNo ratings yet
- Signal Analysis Using MATLABDocument8 pagesSignal Analysis Using MATLABRajiv ShahNo ratings yet
- Math 442 - Introduction to MATLAB in 40 CharactersDocument28 pagesMath 442 - Introduction to MATLAB in 40 CharactersanastirNo ratings yet
- Digital Signal Processing: BY:-Ankit Sharma Roll No: - 0657013108 Btech (It)Document33 pagesDigital Signal Processing: BY:-Ankit Sharma Roll No: - 0657013108 Btech (It)Savyasachi SharmaNo ratings yet
- Lab #1 Introduction To Matlab: Department of Electrical EngineeringDocument18 pagesLab #1 Introduction To Matlab: Department of Electrical EngineeringMohammad Shaheer YasirNo ratings yet
- DSP - Practical 22-23Document30 pagesDSP - Practical 22-23sarangNo ratings yet
- DSP - Practical 22-23Document29 pagesDSP - Practical 22-23sarangNo ratings yet
- Introduction to MATLAB Lab 0 OverviewDocument6 pagesIntroduction to MATLAB Lab 0 OverviewUsama JavedNo ratings yet
- MATLAB Tutorial Week 1: Introduction to Mechanical Systems ModelingDocument27 pagesMATLAB Tutorial Week 1: Introduction to Mechanical Systems ModelingUmar MunawarNo ratings yet
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")From EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Rating: 4 out of 5 stars4/5 (2)
- Programming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandProgramming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 4.5 out of 5 stars4.5/5 (3)
- Introduction To Face Recognition and DetectionDocument54 pagesIntroduction To Face Recognition and DetectionpradanjainNo ratings yet
- Chapter 1 Sampling Theorm2Document13 pagesChapter 1 Sampling Theorm2Aejaz AamerNo ratings yet
- Magoosh GRE Math Formula EbookDocument33 pagesMagoosh GRE Math Formula EbookLavina D'costa100% (1)
- Bio DataDocument2 pagesBio DataAejaz AamerNo ratings yet
- 521279S Multiratefiltering PDFDocument25 pages521279S Multiratefiltering PDFAejaz AamerNo ratings yet
- Multirate - Funds PDFDocument23 pagesMultirate - Funds PDFAejaz AamerNo ratings yet
- USER GUIDE On Telengana State EamcetDocument32 pagesUSER GUIDE On Telengana State EamcetAejaz AamerNo ratings yet
- EigenfacesDocument3 pagesEigenfacesBlueDragon105No ratings yet
- Current Electricity IDocument80 pagesCurrent Electricity IAejaz AamerNo ratings yet
- Chapter 1 Sampling Theorm2Document13 pagesChapter 1 Sampling Theorm2Aejaz AamerNo ratings yet
- Returns Form: (Agreed by You While Placing The Return)Document2 pagesReturns Form: (Agreed by You While Placing The Return)Aejaz AamerNo ratings yet
- 13 12-06-20MultirateSigProcPolyphaseDocument7 pages13 12-06-20MultirateSigProcPolyphaseAejaz AamerNo ratings yet
- Adsp Ws1213 Solution 13Document3 pagesAdsp Ws1213 Solution 13Aejaz AamerNo ratings yet
- BE-4yr-I Sem New Syllabus 20-06-13Document16 pagesBE-4yr-I Sem New Syllabus 20-06-13Sandeep Reddy KankanalaNo ratings yet
- MRSP 4Document155 pagesMRSP 4Aejaz AamerNo ratings yet
- Identities MRSPDocument10 pagesIdentities MRSPAejaz AamerNo ratings yet
- EmbeddedDocument3 pagesEmbeddedAejaz AamerNo ratings yet
- 4 6filter BanksDocument9 pages4 6filter BanksAejaz AamerNo ratings yet
- AT89x52 LCD Driver CodeDocument2 pagesAT89x52 LCD Driver CodeAejaz AamerNo ratings yet
- Keil and Proteus TheoryDocument2 pagesKeil and Proteus TheoryAejaz AamerNo ratings yet
- Fundamentals of Multirate Systems in 38 CharactersDocument9 pagesFundamentals of Multirate Systems in 38 CharactersAejaz AamerNo ratings yet
- Only LCD CircuitDocument1 pageOnly LCD CircuitAejaz AamerNo ratings yet
- Keypad CodeDocument2 pagesKeypad CodeAejaz AamerNo ratings yet
- AT89x52 LCD Driver CodeDocument2 pagesAT89x52 LCD Driver CodeAejaz AamerNo ratings yet
- 3 Short Titles and Text SectionsDocument4 pages3 Short Titles and Text SectionsAejaz AamerNo ratings yet
- Ijritcc 1358Document8 pagesIjritcc 1358Aejaz AamerNo ratings yet
- Tips On How To Write An Abstract For The SeminarDocument2 pagesTips On How To Write An Abstract For The SeminarAejaz Aamer100% (1)
- 07 Trellis Diagram and The Viterbi AlgorithmDocument12 pages07 Trellis Diagram and The Viterbi AlgorithmAejaz AamerNo ratings yet
- Me Ece CSSP Syllabus 2011Document39 pagesMe Ece CSSP Syllabus 2011Aejaz AamerNo ratings yet
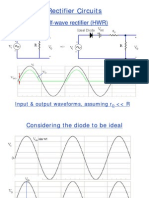
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- ControllerDocument22 pagesControllerMadan Mohan VundavalliNo ratings yet
- Partial Discharge Measurement Coupling MethodsDocument2 pagesPartial Discharge Measurement Coupling MethodskashifNo ratings yet
- Hwuaei Es1201 ManualDocument30 pagesHwuaei Es1201 ManualAnonymous fnFwazyINo ratings yet
- Owner's Manual: Bridgeable Power AmplifierDocument64 pagesOwner's Manual: Bridgeable Power AmplifiervanderleySCLNo ratings yet
- Ezu 2016 1 01Document7 pagesEzu 2016 1 01ΑΘΑΝΑΣΙΟΣ ΚΥΡΓΙΑΣNo ratings yet
- Automation AssignmentDocument3 pagesAutomation AssignmentNaho Senay IINo ratings yet
- IoT Heart Rate Monitoring System Using PhotoplethysmographyDocument9 pagesIoT Heart Rate Monitoring System Using PhotoplethysmographyPenrose LearningNo ratings yet
- System ModelingDocument64 pagesSystem ModelingShuvo ShahedNo ratings yet
- Description Features: Ltc4100 Smart Battery Charger ControllerDocument30 pagesDescription Features: Ltc4100 Smart Battery Charger ControllerAlexander VargasNo ratings yet
- Measuring refractive index of liquids using hollow prismDocument11 pagesMeasuring refractive index of liquids using hollow prismkanishkaranNo ratings yet
- ICE SyllabusDocument122 pagesICE SyllabusMaths Is MagicNo ratings yet
- 4WD John Deere Axles Usd PDFDocument4 pages4WD John Deere Axles Usd PDFarmo105No ratings yet
- Simoreg DC Master: Application SIMOREG For DC-Motor Generator Set ControlDocument24 pagesSimoreg DC Master: Application SIMOREG For DC-Motor Generator Set Controlanas raddawiNo ratings yet
- Aftermarket Products For Encapsulation Machines PDFDocument53 pagesAftermarket Products For Encapsulation Machines PDFAni AndrianiNo ratings yet
- 3.6.2 Radiation 00-10Document16 pages3.6.2 Radiation 00-10Murray PhysicsNo ratings yet
- Dynavar: Station Class and Intermediate Surge ArrestersDocument28 pagesDynavar: Station Class and Intermediate Surge ArrestersSer 345No ratings yet
- Small Antennas For High FrequenciesDocument29 pagesSmall Antennas For High FrequenciesNameNo ratings yet
- 2G Strategy Network Implementation PS Paging Layering 20131217Document10 pages2G Strategy Network Implementation PS Paging Layering 20131217Bayu PramadiyanNo ratings yet
- Integrated amplifiers £700-£1,600 Ultimate Group TestDocument1 pageIntegrated amplifiers £700-£1,600 Ultimate Group TestLuka TrengovskiNo ratings yet
- DELTA 4000: Reference Manual Applications GuideDocument48 pagesDELTA 4000: Reference Manual Applications GuideYan Lin AungNo ratings yet
- K3HB Communication User ManualDocument136 pagesK3HB Communication User ManualFauzan IsmailNo ratings yet
- Characteristics of Silicon and Germanium DiodesDocument2 pagesCharacteristics of Silicon and Germanium DiodesKanageshwari Rathakrishnan100% (4)
- Ogdcl Test 2018Document8 pagesOgdcl Test 2018MuhammadNaveed100% (1)
- Evolution of Computers: 5 Generations from Abacus to AIDocument7 pagesEvolution of Computers: 5 Generations from Abacus to AIOscarLopezHernandez100% (1)
- Egm 60 AfDocument4 pagesEgm 60 Afأبو زينب المهندسNo ratings yet
- 132/11kV Substation Standard Cable ScheduleDocument28 pages132/11kV Substation Standard Cable ScheduleBilal JavaidNo ratings yet
- Speed Control of Three Phase Induction MotorDocument28 pagesSpeed Control of Three Phase Induction MotorRajeev Valunjkar100% (1)
- Amit Kumar ResumeDocument3 pagesAmit Kumar ResumeAmit Kumar SinghNo ratings yet
- Internship Report Complete1Document48 pagesInternship Report Complete1Kaayyoo Koobeeka100% (5)