You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Foundation of Digital Signal ProcessingDocument485 pagesFoundation of Digital Signal ProcessingVarun Prashant Dikshit100% (5)
- Foundation of Digital Signal ProcessingDocument485 pagesFoundation of Digital Signal ProcessingVarun Prashant Dikshit100% (5)
- Matlab Introduction TutorialDocument44 pagesMatlab Introduction Tutorialpriyanka236No ratings yet
- Stockpile and Cut-Off Optimization ModuleDocument1 pageStockpile and Cut-Off Optimization ModuleRicardo Contreras BNo ratings yet
- TOCDocument40 pagesTOCMuthumeenatchi U86% (7)
- Hybrid Servo SystemDocument3 pagesHybrid Servo SystemhollabackcockNo ratings yet
- Software DesignDocument169 pagesSoftware Designnirmala100% (1)
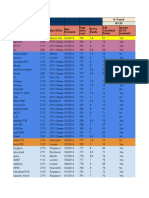
- Canada immigration document tracking list with IELTS scores and points calculationsDocument1,401 pagesCanada immigration document tracking list with IELTS scores and points calculationsNnodim KajahNo ratings yet
- Fms 1 OSQAFAQDocument5 pagesFms 1 OSQAFAQSTRUCTURE -STRUCTURENo ratings yet
- A Quick Introduction To Loops in Matlab: See Pp. 102-105 For A Description of The Fprintf StatementDocument3 pagesA Quick Introduction To Loops in Matlab: See Pp. 102-105 For A Description of The Fprintf StatementKoushik KashyapNo ratings yet
- Fms 1 OSQAFAQDocument5 pagesFms 1 OSQAFAQSTRUCTURE -STRUCTURENo ratings yet
- A Quick Introduction To Loops in Matlab: See Pp. 102-105 For A Description of The Fprintf StatementDocument3 pagesA Quick Introduction To Loops in Matlab: See Pp. 102-105 For A Description of The Fprintf StatementKoushik KashyapNo ratings yet
- Microsoft Band Sizing Guide - ENDocument1 pageMicrosoft Band Sizing Guide - ENNnodim KajahNo ratings yet
- Fms 1 OSQAFAQDocument5 pagesFms 1 OSQAFAQSTRUCTURE -STRUCTURENo ratings yet
- Shielding and GuardingDocument6 pagesShielding and GuardingNnodim KajahNo ratings yet
- Reading List NME3539 - 24576Document1 pageReading List NME3539 - 24576Nnodim KajahNo ratings yet
- Automate Your Home BasicsDocument17 pagesAutomate Your Home BasicsNnodim KajahNo ratings yet
- GE eTCSS Upgrade ProcedureDocument42 pagesGE eTCSS Upgrade ProcedureNnodim KajahNo ratings yet
- A Quick Introduction To Loops in Matlab: See Pp. 102-105 For A Description of The Fprintf StatementDocument3 pagesA Quick Introduction To Loops in Matlab: See Pp. 102-105 For A Description of The Fprintf StatementKoushik KashyapNo ratings yet
- Construction of Automatic Water Level Controller For Both Overhead and Underground TanksDocument70 pagesConstruction of Automatic Water Level Controller For Both Overhead and Underground Tanksmyhomenet119188125% (4)
- Vector Matrice Hw02aqqqDocument9 pagesVector Matrice Hw02aqqqNnodim KajahNo ratings yet
- Engraving SystemsDocument6 pagesEngraving SystemsNnodim KajahNo ratings yet
- Store RoboticsDocument3 pagesStore RoboticsNnodim KajahNo ratings yet
- Welcome: EF 105 Fall 2006 Week 12Document17 pagesWelcome: EF 105 Fall 2006 Week 12Nnodim KajahNo ratings yet
- Welcome: EF 105 Fall 2006 Week 12Document17 pagesWelcome: EF 105 Fall 2006 Week 12Nnodim KajahNo ratings yet
- 2013-14 Embedded Systems Project List - Non IEEE Based Embedded - Electronics - Electrical - Power Electronics - 2013-14Document99 pages2013-14 Embedded Systems Project List - Non IEEE Based Embedded - Electronics - Electrical - Power Electronics - 2013-14ncctprojects3231No ratings yet
- Secrets of Wireless ElectricityDocument18 pagesSecrets of Wireless ElectricityNnodim KajahNo ratings yet
- Microcontroller Basics BeginnersDocument19 pagesMicrocontroller Basics BeginnersNnodim KajahNo ratings yet
- An Efficient Algorithm For Iris Pattern RecognitionDocument14 pagesAn Efficient Algorithm For Iris Pattern RecognitionKaliprasad VkkNo ratings yet
- Automate Your Home BasicsDocument17 pagesAutomate Your Home BasicsNnodim KajahNo ratings yet
- Smart Card Analysis PresentationDocument22 pagesSmart Card Analysis PresentationNnodim KajahNo ratings yet
- Wireless Power Transmission TechnologiesDocument12 pagesWireless Power Transmission TechnologiesNnodim KajahNo ratings yet
- Three Term Control: PID Speed Control System ExampleDocument3 pagesThree Term Control: PID Speed Control System ExampleIhuhwa Marta TauNo ratings yet
- TestingDocument14 pagesTestingsampurnakumarNo ratings yet
- Supplier Responsibilities: Section IIDocument2 pagesSupplier Responsibilities: Section IImehdi810No ratings yet
- Bme Module Total SyllabusDocument120 pagesBme Module Total Syllabussibaprasadpanda123456No ratings yet
- Department of Software Engineering University of GujratDocument7 pagesDepartment of Software Engineering University of GujratBilal IqbalNo ratings yet
- Mechatronics NotesDocument90 pagesMechatronics NotesSanskar AgrawalNo ratings yet
- MIS - Development Process - TutorialspointDocument6 pagesMIS - Development Process - Tutorialspointtusharsinghal94No ratings yet
- Menu - 634641189420527500 - CS5106 Soft Computing Lab AssignmentsDocument3 pagesMenu - 634641189420527500 - CS5106 Soft Computing Lab Assignmentsmohammad650% (1)
- RECURSIVE& Non-RECURSIVE SYSTEM-10th LectureDocument5 pagesRECURSIVE& Non-RECURSIVE SYSTEM-10th LectureaehwnnnNo ratings yet
- Failure Modes and Effects Analysis (FMEA) Surgical Sutures Process 8/22/2020Document2 pagesFailure Modes and Effects Analysis (FMEA) Surgical Sutures Process 8/22/2020Konisbell Alcántara UreñaNo ratings yet
- FSE Chap 1Document25 pagesFSE Chap 1YonasNo ratings yet
- Local vs. Global Optima:: Let X Be A Feasible Solution, ThenDocument17 pagesLocal vs. Global Optima:: Let X Be A Feasible Solution, ThenXiaoqin ZhouNo ratings yet
- Algoritmos GenéticosDocument10 pagesAlgoritmos GenéticosErick VegaNo ratings yet
- Lyapunov-Based MPC for AUV Trajectory TrackingDocument9 pagesLyapunov-Based MPC for AUV Trajectory TrackingEmadNo ratings yet
- Shen Et Al 2024 AMS New AcceptedDocument4 pagesShen Et Al 2024 AMS New AcceptedFala SérioNo ratings yet
- Training Calendar (2017) : School of Quality: Iso 9001:2015 - Quality Management SystemDocument1 pageTraining Calendar (2017) : School of Quality: Iso 9001:2015 - Quality Management SystemHasbullah MohdNo ratings yet
- 2.37 Tuning Interacting Loops, Synchronizing Loops: M. RuelDocument4 pages2.37 Tuning Interacting Loops, Synchronizing Loops: M. RuelSergioNo ratings yet
- DSP-5 (Iir) (S)Document55 pagesDSP-5 (Iir) (S)Jyothi JoNo ratings yet
- ENGEL Training: More Efficiency in Injection MouldingDocument11 pagesENGEL Training: More Efficiency in Injection MouldingradzNo ratings yet
- MOLEX AssociateManagerSoftwareTesting JDDocument2 pagesMOLEX AssociateManagerSoftwareTesting JDYenumula SaicharanNo ratings yet
- Logistic Resource Management (LRM)Document19 pagesLogistic Resource Management (LRM)Mochammad HattaNo ratings yet
- Problems On Bode PlotDocument5 pagesProblems On Bode PlotAnkit Kumar AJ0% (1)
- PDC TopicsDocument2 pagesPDC TopicsJulius BersabeNo ratings yet
- Assignment of Generic Models (Software Engineering)Document8 pagesAssignment of Generic Models (Software Engineering)Kashif IftikharNo ratings yet
- Software Development Life Cycle: Assignment 1Document11 pagesSoftware Development Life Cycle: Assignment 1tuan anhNo ratings yet