You might also like
- 2.1 The Process of Learning 2.1.1 Learning TasksDocument25 pages2.1 The Process of Learning 2.1.1 Learning TasksChaitanya GajbhiyeNo ratings yet
- 4 Multilayer Perceptrons and Radial Basis FunctionsDocument6 pages4 Multilayer Perceptrons and Radial Basis FunctionsVivekNo ratings yet
- 1 Hassoun Chap3 PerceptronDocument10 pages1 Hassoun Chap3 Perceptronporapooka123No ratings yet
- Learn Backprop Neural Net RulesDocument19 pagesLearn Backprop Neural Net RulesStefanescu AlexandruNo ratings yet
- Fast Training of Multilayer PerceptronsDocument15 pagesFast Training of Multilayer Perceptronsgarima_rathiNo ratings yet
- Kevin Swingler - Lecture 3: Delta RuleDocument10 pagesKevin Swingler - Lecture 3: Delta RuleRoots999No ratings yet
- Ex Lecture1Document2 pagesEx Lecture1AlNo ratings yet
- ch6 Perceptron MLP PDFDocument31 pagesch6 Perceptron MLP PDFKrishnanNo ratings yet
- Applicable Artificial Intelligence Back Propagation: Academic Session 2022/2023Document20 pagesApplicable Artificial Intelligence Back Propagation: Academic Session 2022/2023muhammed suhailNo ratings yet
- ADALINE For Pattern Classification: Polytechnic University Department of Computer and Information ScienceDocument27 pagesADALINE For Pattern Classification: Polytechnic University Department of Computer and Information ScienceDahlia DevapriyaNo ratings yet
- Instructor's Solution Manual For Neural NetworksDocument40 pagesInstructor's Solution Manual For Neural NetworksshenalNo ratings yet
- instructor-solution-manual-to-neural-networks-and-deep-learning-a-textbook-solutions-3319944622-9783319944623_compressDocument40 pagesinstructor-solution-manual-to-neural-networks-and-deep-learning-a-textbook-solutions-3319944622-9783319944623_compressHassam HafeezNo ratings yet
- Answers All 2007Document64 pagesAnswers All 2007AngieNo ratings yet
- Back Propagation ALGORITHMDocument11 pagesBack Propagation ALGORITHMMary MorseNo ratings yet
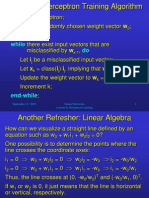
- Refresher: Perceptron Training AlgorithmDocument12 pagesRefresher: Perceptron Training Algorithmeduardo_quintanill_3No ratings yet
- Artificial Neural NetworksDocument21 pagesArtificial Neural NetworksTooba LiaquatNo ratings yet
- Learning in Multi-Layer Perceptrons - Back-Propagation: Neural Computation: Lecture 7Document20 pagesLearning in Multi-Layer Perceptrons - Back-Propagation: Neural Computation: Lecture 7HakanKalaycıNo ratings yet
- Learning Rules: This Definition of The Learning Process Implies The Following Sequence of EventsDocument11 pagesLearning Rules: This Definition of The Learning Process Implies The Following Sequence of Eventsshrilaxmi bhatNo ratings yet
- 2007 02 01b Janecek PerceptronDocument37 pages2007 02 01b Janecek PerceptronRadenNo ratings yet
- The Perceptron, Delta Rule and Its VariantsDocument7 pagesThe Perceptron, Delta Rule and Its VariantsMaryam FarisNo ratings yet
- Institute For Advanced Management Systems Research Department of Information Technologies Abo Akademi UniversityDocument41 pagesInstitute For Advanced Management Systems Research Department of Information Technologies Abo Akademi UniversityKarthikeyanNo ratings yet
- TutorialDocument6 pagesTutorialspwajeehNo ratings yet
- Improving The Rate of Convergence of The Backpropagation Algorithm For Neural Networks Using Boosting With MomentumDocument6 pagesImproving The Rate of Convergence of The Backpropagation Algorithm For Neural Networks Using Boosting With MomentumNikhil Ratna ShakyaNo ratings yet
- Backpropagation AlgorithmDocument3 pagesBackpropagation AlgorithmFernando GaxiolaNo ratings yet
- Lecture Notes To Neural Networks in Electrical EngineeringDocument11 pagesLecture Notes To Neural Networks in Electrical EngineeringNaeem Ali SajadNo ratings yet
- AdalineDocument28 pagesAdalineAnonymous 05P3kMINo ratings yet
- Artificial Neural Networks - MLPDocument52 pagesArtificial Neural Networks - MLPVishnu ChaithanyaNo ratings yet
- 3 DeltaRule PDFDocument10 pages3 DeltaRule PDFKrishnamohanNo ratings yet
- Deep Feedforward Networks Application To Patter RecognitionDocument5 pagesDeep Feedforward Networks Application To Patter RecognitionluizotaviocfgNo ratings yet
- BackpropergationDocument4 pagesBackpropergationParasecNo ratings yet
- Part BDocument36 pagesPart BAngieNo ratings yet
- Anthony Kuh - Neural Networks and Learning TheoryDocument72 pagesAnthony Kuh - Neural Networks and Learning TheoryTuhmaNo ratings yet
- ANN PG Module1Document75 pagesANN PG Module1Sreerag Kunnathu SugathanNo ratings yet
- Pptchapter06 Unit 3Document80 pagesPptchapter06 Unit 3sandeepNo ratings yet
- Implementing Simple Logic Network Using MP Neuron ModelDocument41 pagesImplementing Simple Logic Network Using MP Neuron ModelP SNo ratings yet
- Experiments On Learning by Back PropagationDocument45 pagesExperiments On Learning by Back Propagationnandini chinthalaNo ratings yet
- Back PropDocument2 pagesBack PropNader Nashat NashedNo ratings yet
- Exercise 1 Instruction PcaDocument9 pagesExercise 1 Instruction PcaHanif IshakNo ratings yet
- ANN Models ExplainedDocument42 pagesANN Models ExplainedAakansh ShrivastavaNo ratings yet
- Diagrammatic Derivation of Gradient Algorithms For Neural NetworksDocument23 pagesDiagrammatic Derivation of Gradient Algorithms For Neural NetworksjoseNo ratings yet
- Matlab ManualDocument90 pagesMatlab ManualSri Harsha57% (7)
- Exp 3Document9 pagesExp 3Swastik guptaNo ratings yet
- Crammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsDocument9 pagesCrammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsBlack FoxNo ratings yet
- Kohonen Self Organizing MapsDocument45 pagesKohonen Self Organizing MapsVijaya Lakshmi100% (1)
- Neural Net 3rdclassDocument35 pagesNeural Net 3rdclassUttam SatapathyNo ratings yet
- Artificial Neural NetworksDocument34 pagesArtificial Neural NetworksAYESHA SHAZNo ratings yet
- Multilayered Network ArchitecturesDocument34 pagesMultilayered Network Architecturesaniruthan venkatavaradhanNo ratings yet
- Multilayer Perceptron and Uppercase Handwritten Characters RecognitionDocument4 pagesMultilayer Perceptron and Uppercase Handwritten Characters RecognitionMiguel Angel Beltran RojasNo ratings yet
- CNN Notes on Convolutional Neural NetworksDocument8 pagesCNN Notes on Convolutional Neural NetworksGiri PrakashNo ratings yet
- Learning in Recurrent NetworksDocument17 pagesLearning in Recurrent NetworksAnitha PerumalsamyNo ratings yet
- ARTIFICIAL NEURAL NETWORKS-moduleIIIDocument61 pagesARTIFICIAL NEURAL NETWORKS-moduleIIIelakkadanNo ratings yet
- ANN 3 - PerceptronDocument56 pagesANN 3 - PerceptronNwwar100% (1)
- T. Villmann Et Al - Fuzzy Labeled Neural Gas For Fuzzy ClassificationDocument8 pagesT. Villmann Et Al - Fuzzy Labeled Neural Gas For Fuzzy ClassificationTuhmaNo ratings yet
- Machine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)Document14 pagesMachine Learning: Lecture 4: Artificial Neural Networks (Based On Chapter 4 of Mitchell T.., Machine Learning, 1997)harutyunNo ratings yet
- LVQ Neural Network Implementation in MATLABDocument8 pagesLVQ Neural Network Implementation in MATLABBurak EceNo ratings yet
- An Adaptive Fuzzy Clustering Algorithm With Generalized Entropy Based On Weighted SampleDocument6 pagesAn Adaptive Fuzzy Clustering Algorithm With Generalized Entropy Based On Weighted SampleInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Zhang 2009Document10 pagesZhang 2009Roberth Saénz Pérez AlvaradoNo ratings yet
- FLNN Question BankDocument23 pagesFLNN Question BankDevLaxman75% (4)
- We Don't Eat Our: ClassmatesDocument35 pagesWe Don't Eat Our: ClassmatesChelle Denise Gumban Huyaban85% (20)
- Thin Layer Chromatograph1Document25 pagesThin Layer Chromatograph12581974No ratings yet
- Chapter 9 MafinDocument36 pagesChapter 9 MafinReymilyn SanchezNo ratings yet
- The Road To Privatization: TQM and Business Planning: Bennington, Lynne Cummane, JamesDocument11 pagesThe Road To Privatization: TQM and Business Planning: Bennington, Lynne Cummane, JamesBojan KovacevicNo ratings yet
- Simple Past Tense The Elves and The Shoemaker Short-Story-Learnenglishteam - ComDocument1 pageSimple Past Tense The Elves and The Shoemaker Short-Story-Learnenglishteam - ComgokagokaNo ratings yet
- Ariel StoryDocument2 pagesAriel StoryKKN Pasusukan2018No ratings yet
- Sengoku WakthroughDocument139 pagesSengoku WakthroughferdinanadNo ratings yet
- Fusion Tech ActDocument74 pagesFusion Tech ActrahulrsinghNo ratings yet
- 2018 World Traumatic Dental Injury Prevalence and IncidenceDocument16 pages2018 World Traumatic Dental Injury Prevalence and IncidencebaridinoNo ratings yet
- Supreme Court: Lichauco, Picazo and Agcaoili For Petitioner. Bengzon Villegas and Zarraga For Respondent R. CarrascosoDocument7 pagesSupreme Court: Lichauco, Picazo and Agcaoili For Petitioner. Bengzon Villegas and Zarraga For Respondent R. CarrascosoLOUISE ELIJAH GACUANNo ratings yet
- PHILIPPINE INCOME TAX REVIEWERDocument99 pagesPHILIPPINE INCOME TAX REVIEWERquedan_socotNo ratings yet
- ASBMR 14 Onsite Program Book FINALDocument362 pagesASBMR 14 Onsite Program Book FINALm419703No ratings yet
- Umair Mazher ThesisDocument44 pagesUmair Mazher Thesisumair_mazherNo ratings yet
- Hospital Registration Orientation 3 - EQRs With Operating ManualDocument33 pagesHospital Registration Orientation 3 - EQRs With Operating ManualElshaimaa AbdelfatahNo ratings yet
- Chapter 1. Introduction To TCPIP NetworkingDocument15 pagesChapter 1. Introduction To TCPIP NetworkingPoojitha NagarajaNo ratings yet
- Policy Guidelines On Classroom Assessment K12Document88 pagesPolicy Guidelines On Classroom Assessment K12Jardo de la PeñaNo ratings yet
- ADSL Line Driver Design Guide, Part 2Document10 pagesADSL Line Driver Design Guide, Part 2domingohNo ratings yet
- Row 1Document122 pagesRow 1abraha gebruNo ratings yet
- Software Security Engineering: A Guide for Project ManagersDocument6 pagesSoftware Security Engineering: A Guide for Project ManagersVikram AwotarNo ratings yet
- A Case of DrowningDocument16 pagesA Case of DrowningDr. Asheesh B. PatelNo ratings yet
- School For Good and EvilDocument4 pagesSchool For Good and EvilHaizyn RizoNo ratings yet
- Network Monitoring With Zabbix - HowtoForge - Linux Howtos and TutorialsDocument12 pagesNetwork Monitoring With Zabbix - HowtoForge - Linux Howtos and TutorialsShawn BoltonNo ratings yet
- ARCH1350 Solutions 6705Document16 pagesARCH1350 Solutions 6705Glecy AdrianoNo ratings yet
- ASSIGNMENTDocument5 pagesASSIGNMENTPanchdev KumarNo ratings yet
- Crypto Portfolio Performance and Market AnalysisDocument12 pagesCrypto Portfolio Performance and Market AnalysisWaseem Ahmed DawoodNo ratings yet
- The Other Side of Love AutosavedDocument17 pagesThe Other Side of Love AutosavedPatrick EdrosoloNo ratings yet
- People v Gemoya and Tionko - Supreme Court upholds murder convictionDocument7 pagesPeople v Gemoya and Tionko - Supreme Court upholds murder convictionLASNo ratings yet
- I Will Call Upon The Lord - ACYM - NewestDocument1 pageI Will Call Upon The Lord - ACYM - NewestGerd SteveNo ratings yet
- Word Formation - ExercisesDocument4 pagesWord Formation - ExercisesAna CiocanNo ratings yet
- Gcse English Literature Coursework Grade BoundariesDocument8 pagesGcse English Literature Coursework Grade Boundariesafjwfealtsielb100% (1)