You might also like
- Search Requests and Query My Hidden VideosDocument26 pagesSearch Requests and Query My Hidden VideosEMILY BASSNo ratings yet
- Complete 11 KV Assemblies Final 01-2016Document70 pagesComplete 11 KV Assemblies Final 01-2016zararNo ratings yet
- Writing To Communicate 3 Cynthia Boardman Pve1w PDFDocument4 pagesWriting To Communicate 3 Cynthia Boardman Pve1w PDFMilanMoore57% (7)
- ETL Standards DocumentDocument38 pagesETL Standards DocumentPrathyush KanchiReddy100% (1)
- MagPi108, MagPi Magazine August 2021Document100 pagesMagPi108, MagPi Magazine August 2021Benjamin DoverNo ratings yet
- Resume TemplateDocument3 pagesResume TemplatePeanut d. DestroyerNo ratings yet
- LITERACY Teaching Guide For Senior High School. Manila: PNUDocument8 pagesLITERACY Teaching Guide For Senior High School. Manila: PNUJarven SaguinNo ratings yet
- Lab Manual Windows PowerShell ScriptingDocument21 pagesLab Manual Windows PowerShell ScriptingffNo ratings yet
- Acronis #CyberFit Cloud Tech Fundamentals 2023 HandoutDocument286 pagesAcronis #CyberFit Cloud Tech Fundamentals 2023 HandoutFalcon NogueraNo ratings yet
- FPGA Implementation of CORDIC-Based QRD-RLS AlgorithmDocument5 pagesFPGA Implementation of CORDIC-Based QRD-RLS Algorithmsappal73asNo ratings yet
- Design of Fixed Angle Rotation Using CORDIC: Rajula Saidulu B.KarunaiahDocument5 pagesDesign of Fixed Angle Rotation Using CORDIC: Rajula Saidulu B.KarunaiahmoravinenirambabuNo ratings yet
- Wingz Technologies 9840004562: A Scalable and Modular Architecture For High-Performance Packet ClassificationDocument10 pagesWingz Technologies 9840004562: A Scalable and Modular Architecture For High-Performance Packet ClassificationReni JophyNo ratings yet
- Chapter 1Document6 pagesChapter 1db.rama krishna ReddyNo ratings yet
- FPGA Based Modified Karatsuba MultiplierDocument6 pagesFPGA Based Modified Karatsuba MultiplierMrudula SingamNo ratings yet
- Design and Implementation of High-Performance RNS Wavelet Processors Using Custom IC TechnologiesDocument11 pagesDesign and Implementation of High-Performance RNS Wavelet Processors Using Custom IC TechnologiesKhadar BashaNo ratings yet
- Major Conference PaperDocument14 pagesMajor Conference Papermanishmeenahlm2No ratings yet
- HmetisDocument11 pagesHmetissriNo ratings yet
- Dendro: Parallel Algorithms For Multigrid and AMR Methods On 2:1 Balanced OctreesDocument20 pagesDendro: Parallel Algorithms For Multigrid and AMR Methods On 2:1 Balanced OctreeslanwatchNo ratings yet
- Evaluation of CORDIC Algorithms For FPGA DesignDocument16 pagesEvaluation of CORDIC Algorithms For FPGA DesignVenu Madhav ChittaNo ratings yet
- Parallel Algorithms For VLSI Layout VericationDocument34 pagesParallel Algorithms For VLSI Layout VericationAnoop KuttierimmalNo ratings yet
- Embed and Conquer: Scalable Embeddings For Kernel K-Means On MapreduceDocument9 pagesEmbed and Conquer: Scalable Embeddings For Kernel K-Means On MapreducejefferyleclercNo ratings yet
- Vadi Vel 2017Document8 pagesVadi Vel 2017Banusha chandranNo ratings yet
- 603 PaperDocument6 pages603 PaperMaarij RaheemNo ratings yet
- Computation of Storage Requirements For Multi-Dimensional Signal Processing ApplicationsDocument14 pagesComputation of Storage Requirements For Multi-Dimensional Signal Processing ApplicationsSudhakar SpartanNo ratings yet
- KamarajashastravidhiDocument13 pagesKamarajashastravidhials3No ratings yet
- Yang 2018 Europa RDocument16 pagesYang 2018 Europa RShrey AgarwalNo ratings yet
- Sparse Matrix Storage FormatDocument4 pagesSparse Matrix Storage Formatz.kovacsNo ratings yet
- Optimizing Sparse Matrix Vector Multiplication On SMPS: Eun-Jin Im and Katherine YelickDocument9 pagesOptimizing Sparse Matrix Vector Multiplication On SMPS: Eun-Jin Im and Katherine YelickMiklos ToldiNo ratings yet
- 22.multioperand Redundant Adders On FPGAsDocument13 pages22.multioperand Redundant Adders On FPGAsadaNo ratings yet
- Design and Testing of Systolic Array Multiplier Using Fault Injecting SchemesDocument9 pagesDesign and Testing of Systolic Array Multiplier Using Fault Injecting SchemesCSIT iaesprimeNo ratings yet
- A Broad Review On Various Vlsi Cad Algorithms For Circuit Partitioning ProblemsDocument12 pagesA Broad Review On Various Vlsi Cad Algorithms For Circuit Partitioning ProblemsTJPRC PublicationsNo ratings yet
- Reliability Literature Review Assignment 3Document4 pagesReliability Literature Review Assignment 3TIVIYAH MOGANNo ratings yet
- HARP Hard-Wired Routing Pattern FPGAsDocument9 pagesHARP Hard-Wired Routing Pattern FPGAsmossaied2No ratings yet
- Parasplit: A Scalable Architecture On Fpga For Terabit Packet ClassificationDocument8 pagesParasplit: A Scalable Architecture On Fpga For Terabit Packet ClassificationDevNo ratings yet
- Noc-Based Fpga: Architecture and RoutingDocument10 pagesNoc-Based Fpga: Architecture and RoutingAnonymous 1kEh0GvTgiNo ratings yet
- Jarvinen Elliptic Curve Cryptography On FPGAsDocument10 pagesJarvinen Elliptic Curve Cryptography On FPGAsSachin DeodharNo ratings yet
- Scalable Elliptic Curve Cryptosystem FPGA Processor For NIST Prime CurvesDocument4 pagesScalable Elliptic Curve Cryptosystem FPGA Processor For NIST Prime CurvesjanepriceNo ratings yet
- Chapter 1Document39 pagesChapter 1Kalyan Reddy AnuguNo ratings yet
- Fpga Implementation of A Vedic Convolution Algorithm: Asmita HaveliyaDocument7 pagesFpga Implementation of A Vedic Convolution Algorithm: Asmita HaveliyaParamesh WaranNo ratings yet
- A Novel Approach To High Performance and Low Cost IS-95A CDMA Transceivers Through FPGADocument5 pagesA Novel Approach To High Performance and Low Cost IS-95A CDMA Transceivers Through FPGAneethisathyaNo ratings yet
- High-Performance, Cost-Effective Heterogeneous 3D FPGA ArchitecturesDocument6 pagesHigh-Performance, Cost-Effective Heterogeneous 3D FPGA Architecturesmossaied2No ratings yet
- SPMV CIT10Document6 pagesSPMV CIT10mccssNo ratings yet
- HiFUN White PaperDocument8 pagesHiFUN White PaperPawan MishraNo ratings yet
- An Efficient and High-Speed Overlap-Free Karatsuba-Based Finite-Field Multiplier For FGPA ImplementationDocument10 pagesAn Efficient and High-Speed Overlap-Free Karatsuba-Based Finite-Field Multiplier For FGPA ImplementationReza BarkhordariNo ratings yet
- VlsiDocument32 pagesVlsibalasaravanan0408No ratings yet
- Fpga Implementation of Digital FiltersDocument9 pagesFpga Implementation of Digital Filtersm1u2n3n4i5No ratings yet
- FPGA Implementation of MIMO AlgorithmsDocument4 pagesFPGA Implementation of MIMO AlgorithmsNors NoorNo ratings yet
- 2212 07490Document41 pages2212 07490Simone StefaniNo ratings yet
- Efcient Implementation of Modular Multiplication 192 BitDocument19 pagesEfcient Implementation of Modular Multiplication 192 BitHiywot yesufNo ratings yet
- Reducing Power Consumption of Digital Predistortion For RF Power Amplifiers Using Real-Time Model SwitchingDocument9 pagesReducing Power Consumption of Digital Predistortion For RF Power Amplifiers Using Real-Time Model SwitchingNancyNo ratings yet
- High Performance and Scalable GPU Graph TraversalDocument15 pagesHigh Performance and Scalable GPU Graph TraversalkumarabarbarianNo ratings yet
- VLSI ProjectsDocument4 pagesVLSI ProjectsMallisetty YaswanthNo ratings yet
- The Chinese Remainder Theorem and Its Application in A High-Speed RSA Crypto ChipDocument10 pagesThe Chinese Remainder Theorem and Its Application in A High-Speed RSA Crypto ChipdilemmawoodNo ratings yet
- Why Con Gurable Computing? The Computational Density Advantage of Con Gurable ArchitecturesDocument17 pagesWhy Con Gurable Computing? The Computational Density Advantage of Con Gurable ArchitecturesHari KrishnaNo ratings yet
- Routability of Network Topologies in FpgasDocument4 pagesRoutability of Network Topologies in FpgasSudhakar SpartanNo ratings yet
- Fpga Implementation of Digital FiltersDocument9 pagesFpga Implementation of Digital FiltersMiguel PanduroNo ratings yet
- Design and Implementation of A High-Speed Matrix Multiplier Based On Word-Width DecompositionDocument13 pagesDesign and Implementation of A High-Speed Matrix Multiplier Based On Word-Width DecompositiontmsadamNo ratings yet
- ND IMPLEMENTATION OF CONTENT ADDRESSABLE MEMORY WITH RECONFIGURABLE MEMORY BANKS Ijariie4494Document8 pagesND IMPLEMENTATION OF CONTENT ADDRESSABLE MEMORY WITH RECONFIGURABLE MEMORY BANKS Ijariie4494Nagamani AmpapathiNo ratings yet
- Performance Analysis For Multipliers Based Correlator: Trupti Menghare, Sudesh GuptaDocument5 pagesPerformance Analysis For Multipliers Based Correlator: Trupti Menghare, Sudesh Guptapramod_scribdNo ratings yet
- Comparison of BER Performances ForConventional and Non Conventional MappingSchemes Used in OFDMDocument4 pagesComparison of BER Performances ForConventional and Non Conventional MappingSchemes Used in OFDMNehaKarunyaNo ratings yet
- Fast Arithmetic For Public-Key Algorithms in Galois Fields With Composite ExponentsDocument26 pagesFast Arithmetic For Public-Key Algorithms in Galois Fields With Composite ExponentsfgNo ratings yet
- LS 3Document11 pagesLS 3RohanthNo ratings yet
- Iterative Receivers Combining MIMO DetectionDocument19 pagesIterative Receivers Combining MIMO Detectionrida4No ratings yet
- Ijaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)Document4 pagesIjaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)IAEME PublicationNo ratings yet
- Fpga Based High-Speed A-Oms Lut & Fir System Design: Research ArticleDocument4 pagesFpga Based High-Speed A-Oms Lut & Fir System Design: Research ArticleSowmya PNo ratings yet
- Race Logic: A Hardware Acceleration For Dynamic Programming AlgorithmsDocument12 pagesRace Logic: A Hardware Acceleration For Dynamic Programming AlgorithmsssfofoNo ratings yet
- A SECURE DATA AGGREGATION TECHNIQUE IN WIRELESS SENSOR NETWORKFrom EverandA SECURE DATA AGGREGATION TECHNIQUE IN WIRELESS SENSOR NETWORKNo ratings yet
- Engg Cutoff GenDocument33 pagesEngg Cutoff GenkrishnagdeshpandeNo ratings yet
- Cooperative User Scheduling in Massive MIMO SystemsDocument14 pagesCooperative User Scheduling in Massive MIMO SystemskrishnagdeshpandeNo ratings yet
- Outcome of The Project: 01 International Conference and 01 Journal Paper (SCOPUS Indexed) Applied Solar Energy in PressDocument1 pageOutcome of The Project: 01 International Conference and 01 Journal Paper (SCOPUS Indexed) Applied Solar Energy in PresskrishnagdeshpandeNo ratings yet
- Vision Group On Science and Technology Call For Proposals Under VGST For Fy 2017-18Document10 pagesVision Group On Science and Technology Call For Proposals Under VGST For Fy 2017-18krishnagdeshpandeNo ratings yet
- 10EC011Document1 page10EC011krishnagdeshpandeNo ratings yet
- TopicsDocument3 pagesTopicskrishnagdeshpandeNo ratings yet
- Antenna BasicsDocument10 pagesAntenna BasicsStephen Dunifer100% (3)
- Visvesvaraya Technological University, Belgaum: Semester Regular Exam FeeDocument1 pageVisvesvaraya Technological University, Belgaum: Semester Regular Exam FeekrishnagdeshpandeNo ratings yet
- PCM 30dd02Document41 pagesPCM 30dd02krishnagdeshpandeNo ratings yet
- Antenna BasicsDocument10 pagesAntenna BasicsStephen Dunifer100% (3)
- Lec 6Document7 pagesLec 6krishnagdeshpandeNo ratings yet
- Lec 13Document7 pagesLec 13krishnagdeshpandeNo ratings yet
- M.A.M. College of Engineering Trichy Ec2314 Digital Signal Processing Unit Ii Discrete Time System AnalysisDocument12 pagesM.A.M. College of Engineering Trichy Ec2314 Digital Signal Processing Unit Ii Discrete Time System AnalysiskrishnagdeshpandeNo ratings yet
- Realization of All Logic Gates With HDL CodeDocument58 pagesRealization of All Logic Gates With HDL CodekrishnagdeshpandeNo ratings yet
- L19.Z-Transform. Properties of The ROCDocument14 pagesL19.Z-Transform. Properties of The ROCkrishnagdeshpandeNo ratings yet
- Architectures For Programmable Digital Signal Processing DevicesDocument24 pagesArchitectures For Programmable Digital Signal Processing DevicesShibani SanaNo ratings yet
- Visvesvaraya Technological University, Belgaum: Semester Regular Exam FeeDocument1 pageVisvesvaraya Technological University, Belgaum: Semester Regular Exam FeekrishnagdeshpandeNo ratings yet
- A Brief Introduction To Sigma Delta ConversionDocument7 pagesA Brief Introduction To Sigma Delta ConversionraphaelcuecaNo ratings yet
- Basics of DSPA NotesDocument59 pagesBasics of DSPA NotesBhushanHumneyNo ratings yet
- Ph.D./M.Sc. (Engg.) by Research Program: 2014-15: BranchDocument2 pagesPh.D./M.Sc. (Engg.) by Research Program: 2014-15: BranchkrishnagdeshpandeNo ratings yet
- DSPLab99 DSPBasicDocument34 pagesDSPLab99 DSPBasickrishnagdeshpandeNo ratings yet
- 722 10 8 2003Document95 pages722 10 8 2003RisingFromDepthsNo ratings yet
- 1 Basics DSP AV IntroDocument36 pages1 Basics DSP AV IntroUbaid UmarNo ratings yet
- Smart Ticketing For Indian Railways FinalDocument42 pagesSmart Ticketing For Indian Railways FinalkrishnagdeshpandeNo ratings yet
- DSPA&ADocument1 pageDSPA&AkrishnagdeshpandeNo ratings yet
- Matlab CodesDocument6 pagesMatlab CodeskrishnagdeshpandeNo ratings yet
- Dspa&a Ii IaDocument1 pageDspa&a Ii IakrishnagdeshpandeNo ratings yet
- Generic Sensing Hardware and Real-Time Reconstruction For Structured Analog SignalsDocument4 pagesGeneric Sensing Hardware and Real-Time Reconstruction For Structured Analog SignalskrishnagdeshpandeNo ratings yet
- Focus Test ChartDocument15 pagesFocus Test Chartwuksha95No ratings yet
- Analysis and Design Principles of Microwave Antennas - Unit 1 - How To Access The PortalDocument4 pagesAnalysis and Design Principles of Microwave Antennas - Unit 1 - How To Access The Portalchinnujan24100% (1)
- 9.13 Surge Protection For PROFIBUS FMS, PROFIBUS DP, and Profibus PaDocument4 pages9.13 Surge Protection For PROFIBUS FMS, PROFIBUS DP, and Profibus PaRodrigoBurgosNo ratings yet
- Oracle Advisor Webcast: What's New in Financial Reporting 11.1.2.4.900Document33 pagesOracle Advisor Webcast: What's New in Financial Reporting 11.1.2.4.900huyhnNo ratings yet
- Artificial Intelligence Machine Learnind and ErpDocument13 pagesArtificial Intelligence Machine Learnind and Erpshahanas mubarakNo ratings yet
- DX360LC-7M Dx360lca-7m enDocument20 pagesDX360LC-7M Dx360lca-7m enmsegundomoraleslagosNo ratings yet
- MFM ProcedureDocument2 pagesMFM ProcedurehenryvipxNo ratings yet
- Ajp 13Document6 pagesAjp 13Ganesh EkambeNo ratings yet
- Kurukshetra University, Kurukshetra: Roll N0.-cum-Admit CardDocument2 pagesKurukshetra University, Kurukshetra: Roll N0.-cum-Admit CardANKIT ranaNo ratings yet
- Principles of Data Integrity - Pharmaceutical GuidelinesDocument1 pagePrinciples of Data Integrity - Pharmaceutical Guidelinessandro Cardoso100% (1)
- MLESF Summary Matrix Form ELEMENTARY V3.1with LabelDocument563 pagesMLESF Summary Matrix Form ELEMENTARY V3.1with LabelHero LaguitNo ratings yet
- Superhero Abc 2 PDFDocument10 pagesSuperhero Abc 2 PDFuthaNo ratings yet
- Mine Blast AlgorithmDocument21 pagesMine Blast Algorithmnarottam jangirNo ratings yet
- 7701821350PL AvayaDocument830 pages7701821350PL AvayaVincent NormanNo ratings yet
- Spectradaq-200 Is A Precision Data Acquisition Sound Card Optimized For Test and MeasurementDocument2 pagesSpectradaq-200 Is A Precision Data Acquisition Sound Card Optimized For Test and MeasurementMounicaRasagyaPallaNo ratings yet
- Capless LDO DESIGNDocument6 pagesCapless LDO DESIGNbhasin_hemantNo ratings yet
- Beep CodesDocument5 pagesBeep CodesAkibo Tunde Williamson DaviesNo ratings yet
- CAPM QuestionsDocument49 pagesCAPM QuestionsrahimNo ratings yet
- DX DiagDocument40 pagesDX DiagRadith FitriansyahNo ratings yet
- Everskies - EverskiesDocument1 pageEverskies - Everskieslovelyvxbe36% (11)
- RGB Color Codes ChartDocument6 pagesRGB Color Codes ChartHermawan UsNo ratings yet
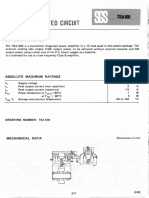
- Linear Integrated Circuit: 5W Audio AmplifierDocument5 pagesLinear Integrated Circuit: 5W Audio AmplifierVictor AsterdamNo ratings yet