You might also like
- FIR FilterDocument82 pagesFIR FilterKarthikeyan TamilselvamNo ratings yet
- DTFT Analysis of Discrete SignalsDocument37 pagesDTFT Analysis of Discrete SignalsTrần Ngọc LâmNo ratings yet
- Z K H Z H: Even M M N Odd M M N N M H N HDocument30 pagesZ K H Z H: Even M M N Odd M M N N M H N HR Firing Destination100% (1)
- DFD Lab SolutionsDocument18 pagesDFD Lab SolutionsAseded AsedNo ratings yet
- Applications of Adaptive FiltersDocument29 pagesApplications of Adaptive FiltersintelheNo ratings yet
- Digital Filters and z-Transform Frequency AnalysisDocument45 pagesDigital Filters and z-Transform Frequency AnalysisSwathi KalagatlaNo ratings yet
- Problem Set 2Document8 pagesProblem Set 2سام النعمانNo ratings yet
- Kochar Inderkumar Asst. Professor MPSTME, MumbaiDocument66 pagesKochar Inderkumar Asst. Professor MPSTME, MumbaiKochar InderkumarNo ratings yet
- Relationship of Z-Transform and Fourier TransformDocument9 pagesRelationship of Z-Transform and Fourier TransformarunathangamNo ratings yet
- IIR Filter Design TechniquesDocument54 pagesIIR Filter Design TechniquesDora TengNo ratings yet
- Optimal Filtering1Document6 pagesOptimal Filtering1mutaz099No ratings yet
- FIR Filter DesignDocument19 pagesFIR Filter DesignPoonam Pratap KadamNo ratings yet
- Summary Dig FiltDocument21 pagesSummary Dig FiltWill BlackNo ratings yet
- Baseband Pulse TransmissionDocument39 pagesBaseband Pulse TransmissionBalaram MullapudiNo ratings yet
- The Fourier Transform and Its ApplicationsDocument4 pagesThe Fourier Transform and Its ApplicationsValeriu RusuNo ratings yet
- Frequency Response of Filters: Amplitude and Phase CharacteristicsDocument5 pagesFrequency Response of Filters: Amplitude and Phase CharacteristicsLee Jia QiNo ratings yet
- Lecture 2Document26 pagesLecture 2Ahmed Diaa AlwakilNo ratings yet
- ECE 410 Digital Signal Processing D. Munson University of Illinois A. SingerDocument26 pagesECE 410 Digital Signal Processing D. Munson University of Illinois A. SingerFreddy PesantezNo ratings yet
- Transformada FourierDocument60 pagesTransformada FourierAlisson FigueiredoNo ratings yet
- DSP Lab Manual 5 Semester Electronics and Communication EngineeringDocument138 pagesDSP Lab Manual 5 Semester Electronics and Communication EngineeringSuguna ShivannaNo ratings yet
- Design of FIR Digital Filters Using Particle Swarm OptimizationDocument26 pagesDesign of FIR Digital Filters Using Particle Swarm OptimizationShekhar sharmaNo ratings yet
- Lesson 2.0 DFTDocument42 pagesLesson 2.0 DFTKrishna Ram BudhathokiNo ratings yet
- Frequeny Domain FilteringDocument48 pagesFrequeny Domain FilteringabcNo ratings yet
- Digital Signal Processing Question and AnswersDocument4 pagesDigital Signal Processing Question and AnswersShikharTyagiNo ratings yet
- Wavelets and Filter Banks: Inheung ChonDocument10 pagesWavelets and Filter Banks: Inheung ChonDrShashikant DargarNo ratings yet
- Assignment 3Document5 pagesAssignment 3Avirup DasguptaNo ratings yet
- Sampling and ReconstructionDocument40 pagesSampling and ReconstructionHuynh BachNo ratings yet
- Acoustic Communications in Shallow Waters: Sławomir JastrzębskiDocument8 pagesAcoustic Communications in Shallow Waters: Sławomir JastrzębskiBùi Trường GiangNo ratings yet
- Applications of Multirate DSP To Software RadiosDocument186 pagesApplications of Multirate DSP To Software Radioshaipm1979No ratings yet
- Digital Communications Formula SheetDocument13 pagesDigital Communications Formula SheetSrikanth Reddy Komatireddy100% (1)
- DTSP Easy SoltnDocument15 pagesDTSP Easy SoltnluckyamruNo ratings yet
- Wavelet basics explainedDocument26 pagesWavelet basics explainedNitasha SharmaNo ratings yet
- Seminar in Large Deviations and ApplicationsDocument14 pagesSeminar in Large Deviations and ApplicationsDomenique SchwestermannNo ratings yet
- Fourier Series and TransformDocument46 pagesFourier Series and TransformVaibhav Patil100% (1)
- DSP PaperDocument3 pagesDSP PaperParth ShahNo ratings yet
- FIR Filter Design: - Linear Phase Filter Design - Magnitude Filter Design - Equalizer DesignDocument20 pagesFIR Filter Design: - Linear Phase Filter Design - Magnitude Filter Design - Equalizer DesignManas BhattNo ratings yet
- Kha DC03 EqualizationDocument34 pagesKha DC03 EqualizationtandobkhcmNo ratings yet
- DSP Lab Sheet 2 PDFDocument50 pagesDSP Lab Sheet 2 PDFSreekrishna DasNo ratings yet
- Spatial Signal Processing BeamformingDocument42 pagesSpatial Signal Processing BeamformingDuval FortesNo ratings yet
- Matlab FileDocument12 pagesMatlab FileBhushan Singh BadgujjarNo ratings yet
- Demodulation and beamforming in ultrasound imagingDocument8 pagesDemodulation and beamforming in ultrasound imagingManjunath RamachandraNo ratings yet
- 3 FIR Filter Design by YBP 01-09-2013Document44 pages3 FIR Filter Design by YBP 01-09-2013Pramiti ParasharNo ratings yet
- Spectral factorization of random processesDocument24 pagesSpectral factorization of random processesSamson ImmanuelNo ratings yet
- EE236A FIR Filter DesignDocument20 pagesEE236A FIR Filter DesignkeputihutaraNo ratings yet
- An Introduction to TomographyDocument80 pagesAn Introduction to TomographyOliveira SamuelNo ratings yet
- 8-Lti PSDDocument10 pages8-Lti PSDpratheep01No ratings yet
- PHYS 352: ReferenceDocument8 pagesPHYS 352: ReferencemasmoxNo ratings yet
- Ch2 Fundamentals 2013Document16 pagesCh2 Fundamentals 2013Mark MaoNo ratings yet
- I-1 DSP Review - 2007Document30 pagesI-1 DSP Review - 2007maxxtorr723No ratings yet
- Small Scale Fading in Radio PropagationDocument15 pagesSmall Scale Fading in Radio Propagationelambharathi88No ratings yet
- Design of Equiripple Linear-Phase FIR Digital Filters LectureDocument65 pagesDesign of Equiripple Linear-Phase FIR Digital Filters LecturePutha KishoreNo ratings yet
- Digital Signal ProcessingDocument40 pagesDigital Signal Processingshankar100% (2)
- DSP-Lec 2Document28 pagesDSP-Lec 2ngmaherNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)From EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)No ratings yet
- MLvs MAPDocument41 pagesMLvs MAPhmbxNo ratings yet
- Elevision2 EnglishDocument18 pagesElevision2 Englishhmbx0% (1)
- C++ LPCDocument7 pagesC++ LPCMostafa BayomeNo ratings yet
- Addison EEG ReviewDocument45 pagesAddison EEG ReviewTruong Phong TuyenNo ratings yet
- ECC Overview Explains Error Types, Block & Convolutional CodesDocument38 pagesECC Overview Explains Error Types, Block & Convolutional CodeshmbxNo ratings yet
- PX C 3883683Document6 pagesPX C 3883683hmbxNo ratings yet
- c1cd7b4cdd34596 EkDocument4 pagesc1cd7b4cdd34596 Ekvidi87No ratings yet
- Addison EEG ReviewDocument45 pagesAddison EEG ReviewTruong Phong TuyenNo ratings yet
- Hydraulic Elevator Thyssenkrupp ElevatorsDocument187 pagesHydraulic Elevator Thyssenkrupp Elevatorshmbx100% (3)
- Englis Phrases For Writing and SpeakingDocument8 pagesEnglis Phrases For Writing and SpeakinghmbxNo ratings yet
- Advanced Circuit AnalysisDocument77 pagesAdvanced Circuit Analysishwa890No ratings yet
- Solution Guide, Differential EquationDocument53 pagesSolution Guide, Differential EquationhmbxNo ratings yet
- NICE 1000 Integrated Controller ManualDocument172 pagesNICE 1000 Integrated Controller Manualhmbx100% (4)
- Chapter 07Document110 pagesChapter 07hmbxNo ratings yet
- Matlab Learning-FarsiDocument103 pagesMatlab Learning-FarsihmbxNo ratings yet
- DY-20 & 30 Manual Rev 1.1Document141 pagesDY-20 & 30 Manual Rev 1.1hmbx67% (3)
- 06laplac Ti 89 LaplasDocument10 pages06laplac Ti 89 LaplashmbxNo ratings yet
- TCBCDocument29 pagesTCBChmbx67% (12)
- DY 20L ManualDocument154 pagesDY 20L Manualhmbx100% (6)
- 06laplac Ti 89 LaplasDocument10 pages06laplac Ti 89 LaplashmbxNo ratings yet
- CFG CUS-23BDocument3 pagesCFG CUS-23BhmbxNo ratings yet
- Installation Manual 3ats, 3adts, 3Nts, 3Ndts G-Design 1600-3200 A Transfer SwitchesDocument8 pagesInstallation Manual 3ats, 3adts, 3Nts, 3Ndts G-Design 1600-3200 A Transfer SwitchesMahmoud M.AbdelalimNo ratings yet
- Telit GE910-QUAD DatasheetDocument2 pagesTelit GE910-QUAD DatasheetChristian Guardia CalderónNo ratings yet
- Copeland CRN5 0500 PFV 970 Submittal SheetDocument1 pageCopeland CRN5 0500 PFV 970 Submittal SheetAronis serranoNo ratings yet
- Honeywell Vista 128bpt Data SheetDocument4 pagesHoneywell Vista 128bpt Data SheetAlarm Grid Home Security and Alarm MonitoringNo ratings yet
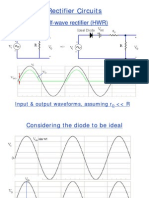
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- Procedure For SCC & OCC TestDocument3 pagesProcedure For SCC & OCC TestAyan MajiNo ratings yet
- IIEE Guide For The Design and Installation of ServiceDocument51 pagesIIEE Guide For The Design and Installation of ServiceJoel Remegio100% (1)
- Ds Parani Sd1000Document2 pagesDs Parani Sd1000crystalng5259No ratings yet
- Tubes Vs TransistorsDocument18 pagesTubes Vs TransistorsamapandahukiNo ratings yet
- Design For Safety (DFS) Library Examples of Hazards - Mechanical & Electrical DesignDocument7 pagesDesign For Safety (DFS) Library Examples of Hazards - Mechanical & Electrical Designg tsNo ratings yet
- Engineering Materials Reviewer 3Document23 pagesEngineering Materials Reviewer 3Ronald O.No ratings yet
- Anvyl UcfDocument15 pagesAnvyl Ucfajit_kakadiyaNo ratings yet
- POSTEF - ZXDU68 B301 (V5.0R07M02) Embedded DC Power System PDFDocument4 pagesPOSTEF - ZXDU68 B301 (V5.0R07M02) Embedded DC Power System PDFNguyen Vu Hoang ThachNo ratings yet
- A Simplified Broadband Design Methodology For Linearized High-Efficiency Continuous Class-F Power AmplifiersDocument12 pagesA Simplified Broadband Design Methodology For Linearized High-Efficiency Continuous Class-F Power AmplifiersG H Raisoni College of Engineering NagpurNo ratings yet
- Bright New 42-inch and 47-inch FULL-HD LCD Displays for SignageDocument2 pagesBright New 42-inch and 47-inch FULL-HD LCD Displays for SignageKerrin HardyNo ratings yet
- AK668E+Q7 ManualDocument106 pagesAK668E+Q7 ManualEver J BC75% (8)
- Speed Control of Three Phase Induction MotorDocument28 pagesSpeed Control of Three Phase Induction MotorRajeev Valunjkar100% (1)
- Vn-541pc Basic Manual MultiDocument136 pagesVn-541pc Basic Manual MultiRD MediaNo ratings yet
- FSK-628D Gobernador Electronico de MotorDocument35 pagesFSK-628D Gobernador Electronico de Motorsoldadores motoresNo ratings yet
- APC Battery Management SystemDocument2 pagesAPC Battery Management SystemGuha ArnabNo ratings yet
- Rane Sixty-Two Mixer For Serato Scratch LiveDocument4 pagesRane Sixty-Two Mixer For Serato Scratch Live2009tamerNo ratings yet
- Arduino Style Guide For Writing Libraries: Search The Arduino WebsiteDocument4 pagesArduino Style Guide For Writing Libraries: Search The Arduino WebsiteAJBROSNo ratings yet
- Precision Digital Sine-Wave Generation With The TMS32010: Application Report: Spra007Document23 pagesPrecision Digital Sine-Wave Generation With The TMS32010: Application Report: Spra007naveen reddyNo ratings yet
- 4730 0013 04bDocument966 pages4730 0013 04bDoron ForshtatNo ratings yet
- Inside A DELL D610 Battery ..Document5 pagesInside A DELL D610 Battery ..Srdjan BNo ratings yet
- NMEA 2000 Network Fundamentals: Garmin NMEA 2000 Devices and ComponentsDocument12 pagesNMEA 2000 Network Fundamentals: Garmin NMEA 2000 Devices and ComponentsPhuocTranThienNo ratings yet
- Copie de Tarif - ABB - KAUFEL - 2019 - 02 - v3Document207 pagesCopie de Tarif - ABB - KAUFEL - 2019 - 02 - v3ABELWALIDNo ratings yet
- WhirlpoolDocument23 pagesWhirlpoolmrfarhatNo ratings yet
- SBL 1Document2 pagesSBL 1Muhammad NaveedNo ratings yet
- Video Processor Vep-2100fDocument18 pagesVideo Processor Vep-2100fVictor BlancoNo ratings yet

























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-1-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)