You might also like
- Chapter - Fuzzy LogicDocument6 pagesChapter - Fuzzy LogicModdy CavallindoNo ratings yet
- 1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsFrom Everand1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsRating: 4 out of 5 stars4/5 (2)
- Addition Function in Logic GateDocument5 pagesAddition Function in Logic GateYosif AlanesiNo ratings yet
- 2EL11-Digital Electronic - Adder and Flip-Flop Circuits: Pusat Pengajian Sains Fizik Universiti Sains MalaysiaDocument8 pages2EL11-Digital Electronic - Adder and Flip-Flop Circuits: Pusat Pengajian Sains Fizik Universiti Sains MalaysiaCogCoilNo ratings yet
- Adder and Flip-Flop 2EL11Document19 pagesAdder and Flip-Flop 2EL11CogCoilNo ratings yet
- Lecture 12 - 4Document4 pagesLecture 12 - 4AwadHilmyNo ratings yet
- Chap6 SDocument61 pagesChap6 SRaghad AlnajimNo ratings yet
- Introduction To: Information RetrievalDocument31 pagesIntroduction To: Information RetrievalTamizharasi ANo ratings yet
- 10 32ps2solutionDocument11 pages10 32ps2solutionMABUKE NDINAINWI INNOCENTIANo ratings yet
- flow control.كاملDocument14 pagesflow control.كاملali salmanNo ratings yet
- Logic Gates, Truth Tables, Operator PrecedenceDocument9 pagesLogic Gates, Truth Tables, Operator PrecedenceSounak ChatterjeeNo ratings yet
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNo ratings yet
- Hand-Out Note On Buckley-Leverett AnalysisDocument9 pagesHand-Out Note On Buckley-Leverett Analysismexx4u2nvNo ratings yet
- Q KK A Gsin Q KK A Gsin: Uckley Everett NalysisDocument9 pagesQ KK A Gsin Q KK A Gsin: Uckley Everett NalysisduyvkNo ratings yet
- Q KK A Gsin Q KK A Gsin: Uckley Everett NalysisDocument9 pagesQ KK A Gsin Q KK A Gsin: Uckley Everett NalysisIrina AndreevaNo ratings yet
- Adder and Subtractor Circuits PDFDocument8 pagesAdder and Subtractor Circuits PDFSoumya Ranjan MohantyNo ratings yet
- Lec 2 Boolean AlgebraDocument44 pagesLec 2 Boolean AlgebraCatherine IvanaNo ratings yet
- Stepper Motor Controller Using 8051Document37 pagesStepper Motor Controller Using 8051gutzz0079197100% (2)
- Assignment #03: Submitted byDocument7 pagesAssignment #03: Submitted byMUHAMMAD ABDULLAHNo ratings yet
- Lab 06Document4 pagesLab 06AafaqIqbalNo ratings yet
- Combinational Logic Circuits Experiment 4Document11 pagesCombinational Logic Circuits Experiment 4Vince abcdNo ratings yet
- Odd and Even SortDocument3 pagesOdd and Even SortKevinNo ratings yet
- ECE18D - Updated Final Project ProposalDocument4 pagesECE18D - Updated Final Project ProposalRENIER JANE GAIDNo ratings yet
- DBminiprojectDocument11 pagesDBminiprojectPramodNo ratings yet
- Lecture 2 Inverted Index PDFDocument24 pagesLecture 2 Inverted Index PDFMuhammad NoumanNo ratings yet
- FlipFlop IntroductionDocument33 pagesFlipFlop IntroductionTeddy KhantNo ratings yet
- Assignment #03: Submitted byDocument7 pagesAssignment #03: Submitted byMUHAMMAD ABDULLAHNo ratings yet
- Bartelt Solutions ManualDocument63 pagesBartelt Solutions ManualInnocent PersonNo ratings yet
- EXPERIMENT # 5 - ECE 3A Cruz, JairehDale FDocument4 pagesEXPERIMENT # 5 - ECE 3A Cruz, JairehDale FJaireh Dale CruzNo ratings yet
- Full Adder 05122023 015308pmDocument4 pagesFull Adder 05122023 015308pmarmarking654No ratings yet
- Full Adders KHIZERDocument2 pagesFull Adders KHIZERmatran282No ratings yet
- 3-Bit Ripple Carry Adder and 3-Bit Subtractor in Unsigned Binary & 2's ComplementDocument6 pages3-Bit Ripple Carry Adder and 3-Bit Subtractor in Unsigned Binary & 2's ComplementmukulNo ratings yet
- CH 9Document21 pagesCH 9Yến PhanNo ratings yet
- Boolean Algebra Activity 1Document9 pagesBoolean Algebra Activity 1thilinipiyumika2No ratings yet
- Battery (New) Run Time CalculatorDocument7 pagesBattery (New) Run Time CalculatorJose Mata RamcharanNo ratings yet
- Lecture 2: RF Power: DR G Burt Lancaster University EngineeringDocument33 pagesLecture 2: RF Power: DR G Burt Lancaster University EngineeringTheano XirouchakiNo ratings yet
- 06102017-Boolean ExpressionsDocument9 pages06102017-Boolean ExpressionsPearl Anne ManilaNo ratings yet
- HeliDocument8 pagesHelidixade1732No ratings yet
- Sulam ProjectDocument21 pagesSulam ProjectAhmed RaeesNo ratings yet
- 3 PLC Program To Implement Various Boolean Functions With DonDocument2 pages3 PLC Program To Implement Various Boolean Functions With DonMaria GuerreroNo ratings yet
- Kinematics Part 3Document22 pagesKinematics Part 3fatinNo ratings yet
- DLC Lab Report 03Document13 pagesDLC Lab Report 03Carry GamingNo ratings yet
- EXPERIMENT # 4: Combinational Logic Circuits Name: - Date: - Equipment/Parts NeededDocument6 pagesEXPERIMENT # 4: Combinational Logic Circuits Name: - Date: - Equipment/Parts Neededblue24No ratings yet
- Mani MATLAB 4Document3 pagesMani MATLAB 4Gosh KreativityNo ratings yet
- HardaddsoftDocument8 pagesHardaddsoftSHYAMNo ratings yet
- Lab Report#1 Electronics-I: Submitted To: Submitted By: Reg No.: DateDocument7 pagesLab Report#1 Electronics-I: Submitted To: Submitted By: Reg No.: DateMuhammad SobanNo ratings yet
- EE-121 Chap06 AddersDocument26 pagesEE-121 Chap06 AddersAliNo ratings yet
- Basic and Derived Logic GatesDocument33 pagesBasic and Derived Logic Gatesseyoum shimelsNo ratings yet
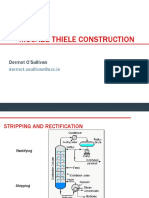
- McCabe Thiele ConstructionDocument50 pagesMcCabe Thiele ConstructionUmur Faruok Olumide SobayoNo ratings yet
- Rohail EEL A2Document2 pagesRohail EEL A2Mixter KhanNo ratings yet
- Ib Phys DC ESQ C 231118 135711Document32 pagesIb Phys DC ESQ C 231118 135711sammeaan khanNo ratings yet
- Adding Binary Numbers: Half and Full AddersDocument56 pagesAdding Binary Numbers: Half and Full AdderstylerNo ratings yet
- Calibration of A Bourdons Gauge Connected To Dead Weight TesterDocument5 pagesCalibration of A Bourdons Gauge Connected To Dead Weight TesterAdnAnKhanNo ratings yet
- 06 Behavior - XterisationDocument21 pages06 Behavior - XterisationElie KabangaNo ratings yet
- Chapter 3Document34 pagesChapter 3Alazar GetachewNo ratings yet
- Background Voice Over Internet Protocol (VoIP) Is A Technology ForDocument4 pagesBackground Voice Over Internet Protocol (VoIP) Is A Technology ForramachandraNo ratings yet
- Web Caching ArchitDocument8 pagesWeb Caching ArchitramachandraNo ratings yet
- Wake On LAN White PaperDocument9 pagesWake On LAN White PaperramachandraNo ratings yet
- Caching On The Changing Web: Ying Xing May 17, 2001Document18 pagesCaching On The Changing Web: Ying Xing May 17, 2001ramachandraNo ratings yet
- SP800 58 FinalDocument99 pagesSP800 58 FinalHenrik JohansenNo ratings yet
- Web Caching AlgDocument4 pagesWeb Caching AlgramachandraNo ratings yet
- Metropolitan Road Traffic Simulation On FpgasDocument10 pagesMetropolitan Road Traffic Simulation On FpgasramachandraNo ratings yet
- Uds10 Uds100 User GuideDocument78 pagesUds10 Uds100 User GuideramachandraNo ratings yet
- Uml BasicsDocument16 pagesUml Basicsverma.saket.pramod713250% (2)
- Traffic Simulation DataDocument25 pagesTraffic Simulation DataramachandraNo ratings yet
- User Datagram Protocol (Udp)Document6 pagesUser Datagram Protocol (Udp)ramachandraNo ratings yet
- PWD AuthenticationDocument8 pagesPWD AuthenticationramachandraNo ratings yet
- Title of DissertationDocument148 pagesTitle of DissertationramachandraNo ratings yet
- Traffic Simulation DataDocument25 pagesTraffic Simulation DataramachandraNo ratings yet
- SHA1 Encryption Algorithm: Adi - Amd ARM - DSP Group Lsi Logic ZSP Mips - TiDocument1 pageSHA1 Encryption Algorithm: Adi - Amd ARM - DSP Group Lsi Logic ZSP Mips - TiramachandraNo ratings yet
- The OSI Layers Full DescribedDocument3 pagesThe OSI Layers Full Describedshailesh_shekharNo ratings yet
- Vikram Reddy AndemDocument68 pagesVikram Reddy Andemanon_838639460No ratings yet
- SITE Commands On FTP ServerDocument4 pagesSITE Commands On FTP ServerramachandraNo ratings yet
- TCP-OSI Layers DataDocument2 pagesTCP-OSI Layers DataramachandraNo ratings yet
- Tea Tiny AlgorithmDocument4 pagesTea Tiny AlgorithmramachandraNo ratings yet
- Serial-Spec in JavaDocument84 pagesSerial-Spec in JavaramachandraNo ratings yet
- Searching: Deterministic Single-Agent: Andrew W. Moore Professor School of Computer Science Carnegie Mellon UniversityDocument45 pagesSearching: Deterministic Single-Agent: Andrew W. Moore Professor School of Computer Science Carnegie Mellon UniversityramachandraNo ratings yet
- Modul APSI - SDLCDocument10 pagesModul APSI - SDLCHafizh ArdiNo ratings yet
- What Is Software TestingDocument12 pagesWhat Is Software TestingPragati SharmaNo ratings yet
- SHA-256 Secure Hash Function Megafunction: ApplicationsDocument2 pagesSHA-256 Secure Hash Function Megafunction: ApplicationsramachandraNo ratings yet
- Dynamic Authentication by Typing Patterns TJHSST Senior Research Project Proposal Computer Systems Lab 2009-2010Document7 pagesDynamic Authentication by Typing Patterns TJHSST Senior Research Project Proposal Computer Systems Lab 2009-2010ramachandraNo ratings yet
- Grid-Based Path-Finding: Abstract. Path-Finding Is An Important Problem For Many ApplicationsDocument12 pagesGrid-Based Path-Finding: Abstract. Path-Finding Is An Important Problem For Many ApplicationsramachandraNo ratings yet
- OSI Model PDFDocument11 pagesOSI Model PDFchavansujayNo ratings yet
- Page Replacement Algs DatagoodDocument22 pagesPage Replacement Algs DatagoodramachandraNo ratings yet
- Cryptanalysis of Microsoft's Point-To-Point Tunneling Protocol (PPTP)Document10 pagesCryptanalysis of Microsoft's Point-To-Point Tunneling Protocol (PPTP)ramachandraNo ratings yet
- Engineering Economics: Ali SalmanDocument11 pagesEngineering Economics: Ali SalmanAli Haider RizviNo ratings yet
- N. P Bali Sem (Ii ND) - 354-448Document95 pagesN. P Bali Sem (Ii ND) - 354-448Akshat tiwariNo ratings yet
- Eng SP CognatesDocument29 pagesEng SP Cognatescuba_viajesNo ratings yet
- SubtractorDocument11 pagesSubtractorRocky SamratNo ratings yet
- Sample Physics Lab ReportDocument4 pagesSample Physics Lab ReportTaehyun ChangNo ratings yet
- Vibration Analysis LevelDocument230 pagesVibration Analysis LevelAhmed shawkyNo ratings yet
- Cambridge Espresso - 42 - Division - and - MultiplicationDocument2 pagesCambridge Espresso - 42 - Division - and - Multiplicationilonka kolevaNo ratings yet
- VIBRATION LAB BMM3553 COOPERATIVE LEARNING - Version 1718Document2 pagesVIBRATION LAB BMM3553 COOPERATIVE LEARNING - Version 1718Hassan JabbarNo ratings yet
- Chapter 4 Circuit - Theorems PDFDocument56 pagesChapter 4 Circuit - Theorems PDFHafzal GaniNo ratings yet
- Peta Jaringan Layanan Angkutan UmumDocument1 pagePeta Jaringan Layanan Angkutan UmumARFICONo ratings yet
- Definitions: Figure 1. The Normal Distribution GraphDocument8 pagesDefinitions: Figure 1. The Normal Distribution GraphAndres BrutasNo ratings yet
- Heath y Carter 67Document18 pagesHeath y Carter 67Simon HenriquezNo ratings yet
- Stability of Concrete Gravity Dams Against Sliding Contact On The Bottom of Dam Foundation Using The Software ABAQUS and RS-DAMDocument15 pagesStability of Concrete Gravity Dams Against Sliding Contact On The Bottom of Dam Foundation Using The Software ABAQUS and RS-DAMFoolad Gharb100% (1)
- Daily Practice Problems 2 PDFDocument2 pagesDaily Practice Problems 2 PDFFUN 360No ratings yet
- Written Report ProbabilityDocument8 pagesWritten Report ProbabilitySherl Escandor100% (1)
- Polygon ClippingDocument25 pagesPolygon ClippingSahil Gupta50% (2)
- Attenuation and DispersionDocument92 pagesAttenuation and Dispersionscribd01No ratings yet
- Mikroniek 2010 2 1Document7 pagesMikroniek 2010 2 1Vipin YadavNo ratings yet
- Thermo 5th Chap03P061Document22 pagesThermo 5th Chap03P061IENCSNo ratings yet
- MGT 6203 - Sri - M5 - Treatment Effects v042919Document21 pagesMGT 6203 - Sri - M5 - Treatment Effects v042919lexleong9610No ratings yet
- 1 Eigenvalues, Eigenvectors, Eigenspaces: Eigenvalue Characteristic ValueDocument17 pages1 Eigenvalues, Eigenvectors, Eigenspaces: Eigenvalue Characteristic ValueSarit BurmanNo ratings yet
- CBSE Class 12 Physics Alternating Current NotesDocument84 pagesCBSE Class 12 Physics Alternating Current NotesSanikaa MadhuNo ratings yet
- CMPT 354 Assignment 3Document7 pagesCMPT 354 Assignment 3rakyn21No ratings yet
- Solution - Real Analysis - Folland - Ch1Document14 pagesSolution - Real Analysis - Folland - Ch1胡爻垚No ratings yet
- Statistics MCQ QuestionsDocument16 pagesStatistics MCQ Questionsmanish78% (9)
- PMP Exam Cram Test BankDocument260 pagesPMP Exam Cram Test Bankmuro562001100% (2)
- Prelim FinalDocument440 pagesPrelim FinalRon AquinoNo ratings yet
- Block Diagrams & Signal Flow GraphsDocument47 pagesBlock Diagrams & Signal Flow GraphsMacky Pogi02No ratings yet
- Torreti - Bachelard e FenomenotecnicaDocument19 pagesTorreti - Bachelard e FenomenotecnicaGabriel Kafure da RochaNo ratings yet
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (1)
- Programming with STM32: Getting Started with the Nucleo Board and C/C++From EverandProgramming with STM32: Getting Started with the Nucleo Board and C/C++Rating: 3.5 out of 5 stars3.5/5 (3)
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideFrom EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideRating: 1 out of 5 stars1/5 (1)
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesFrom EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesNo ratings yet
- Windows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertFrom EverandWindows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertRating: 3.5 out of 5 stars3.5/5 (6)
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsFrom EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsNo ratings yet
- Patterns in the Machine: A Software Engineering Guide to Embedded DevelopmentFrom EverandPatterns in the Machine: A Software Engineering Guide to Embedded DevelopmentRating: 5 out of 5 stars5/5 (1)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (1)
- Raspberry Pi | 101: The Beginner’s Guide with Basics on Hardware, Software, Programming & ProjecFrom EverandRaspberry Pi | 101: The Beginner’s Guide with Basics on Hardware, Software, Programming & ProjecNo ratings yet
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102No ratings yet