You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- 209-Titan PSW 12Document2 pages209-Titan PSW 12jafaristsNo ratings yet
- 210-Titan PSW 15Document2 pages210-Titan PSW 15jafaristsNo ratings yet
- Figure 4.9: The Two Pumps Are Geared To A Single Turbine Such That Each of The Three Components Is Running at Its Design SpeedDocument1 pageFigure 4.9: The Two Pumps Are Geared To A Single Turbine Such That Each of The Three Components Is Running at Its Design SpeedjafaristsNo ratings yet
- 211-Titan PSW 30Document2 pages211-Titan PSW 30jafaristsNo ratings yet
- Titan PSW 20: Marine and Stationary Engine Oil According To API CF Description ApplicationDocument1 pageTitan PSW 20: Marine and Stationary Engine Oil According To API CF Description ApplicationjafaristsNo ratings yet
- 501 Renolit MPDocument1 page501 Renolit MPjafaristsNo ratings yet
- Appendix A Combustion ChartsDocument8 pagesAppendix A Combustion ChartsjafaristsNo ratings yet
- Kerosene Pump: Impeller Inlet (Assume End - Suction Pump)Document13 pagesKerosene Pump: Impeller Inlet (Assume End - Suction Pump)jafaristsNo ratings yet
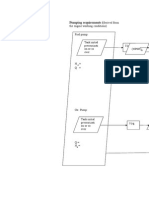
- Pumping Requirements (: Derived From The Engine Working Conditions)Document1 pagePumping Requirements (: Derived From The Engine Working Conditions)jafaristsNo ratings yet
- SBM MillsDocument12 pagesSBM MillsjafaristsNo ratings yet
- The LMV-343 Pump: Appendix E: Specifications of Sundyne High Head Low-Flow Centrifugal PumpsDocument16 pagesThe LMV-343 Pump: Appendix E: Specifications of Sundyne High Head Low-Flow Centrifugal PumpsjafaristsNo ratings yet
- Appendix A: Combustion ChartsDocument12 pagesAppendix A: Combustion ChartsjafaristsNo ratings yet
- Figure (1.6) Adiabatic Flame TemperatureDocument1 pageFigure (1.6) Adiabatic Flame TemperaturejafaristsNo ratings yet
- Impeller Inlet (Assume End - Suction Pump) : See Shaft CalculationsDocument5 pagesImpeller Inlet (Assume End - Suction Pump) : See Shaft CalculationsjafaristsNo ratings yet
- Figure (1.5) Optimum Mixture RatioDocument1 pageFigure (1.5) Optimum Mixture RatiojafaristsNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Electric Potential Energy - Wikipedia, The Free EncyclopediaDocument4 pagesElectric Potential Energy - Wikipedia, The Free Encyclopediadonodoni0008No ratings yet
- Convection Heat Transfer in Micro-ChannelsDocument50 pagesConvection Heat Transfer in Micro-ChannelsBehzad Mohajer100% (1)
- Age of Veda2sDocument12 pagesAge of Veda2sAbhinav MadheshiyaNo ratings yet
- 307-01 Automatic Transmission 10 Speed - Description and Operation - DescriptionDocument12 pages307-01 Automatic Transmission 10 Speed - Description and Operation - DescriptionCARLOS LIMADANo ratings yet
- A New Multilevel Coding Method Using Error-Correcting Codes - Correction ToDocument1 pageA New Multilevel Coding Method Using Error-Correcting Codes - Correction ToAmirhossein MohsenianNo ratings yet
- Belmokhtar Triaxial 2018 HALDocument39 pagesBelmokhtar Triaxial 2018 HALSaad JuventinoNo ratings yet
- Chapter-1 FinalDocument8 pagesChapter-1 FinalHazel NutNo ratings yet
- Best Practice-Rans Turbulence Modeling in Ansys CFDDocument95 pagesBest Practice-Rans Turbulence Modeling in Ansys CFDMohiNo ratings yet
- Restriction Orifice Sizing For A Minimum Recirculation LineDocument5 pagesRestriction Orifice Sizing For A Minimum Recirculation LineChemical.AliNo ratings yet
- Design Calculations: Condition - 1 Operating Bolt Load: Wm1Document2 pagesDesign Calculations: Condition - 1 Operating Bolt Load: Wm1EDWIN M.PNo ratings yet
- 1synensis HENSADDocument8 pages1synensis HENSADEfrain ValeNo ratings yet
- Instructions For Experiment 5Document5 pagesInstructions For Experiment 5ratsateNo ratings yet
- Diffusivity of Liquid Into LiquidDocument8 pagesDiffusivity of Liquid Into LiquidZahraa GhanemNo ratings yet
- Lecture 1 Internal Loadings and StressesDocument22 pagesLecture 1 Internal Loadings and Stresseskyle vincent0% (1)
- Highway Design and Railways2Document4 pagesHighway Design and Railways2arnob hridoyNo ratings yet
- Physics - Unit 1 - 10Document55 pagesPhysics - Unit 1 - 10Yenny TigaNo ratings yet
- Directions: Read and Answer The Questions Below. Encircle The Letter of The Correct AnswerDocument3 pagesDirections: Read and Answer The Questions Below. Encircle The Letter of The Correct AnswerBENNY CALLONo ratings yet
- CASTEP StartupDocument38 pagesCASTEP StartupMuraleetharan BoopathiNo ratings yet
- Physics Dictionary KSSMDocument10 pagesPhysics Dictionary KSSMsueqingNo ratings yet
- Why Tight-Binding Theory?: Walter A. HarrisonDocument5 pagesWhy Tight-Binding Theory?: Walter A. HarrisonzoehdiismailNo ratings yet
- Jee Main 2021 March Attempt Official Question SolutionDocument154 pagesJee Main 2021 March Attempt Official Question Solutiondixitmanish0786No ratings yet
- Observations and Tabulation Table 1 Results of Centrifugal Pump (Rated Speed)Document6 pagesObservations and Tabulation Table 1 Results of Centrifugal Pump (Rated Speed)adityaNo ratings yet
- Appendix F: UnitsDocument3 pagesAppendix F: Unitsjohn guinyangNo ratings yet
- Design of WeldDocument4 pagesDesign of WeldAsaru DeenNo ratings yet
- GOFUN2017 ParticleSimulations SlidesDocument44 pagesGOFUN2017 ParticleSimulations SlidesAnonymous dDTRvVNo ratings yet
- PolyakovDocument3 pagesPolyakovmenilanjan89nLNo ratings yet
- Sample Practice Paper 02 Class 09Document11 pagesSample Practice Paper 02 Class 09Sheereen MominNo ratings yet
- Theories of Covalent BondingDocument35 pagesTheories of Covalent Bondingpeterpaul_1211No ratings yet