You might also like
- Motor NemaDocument37 pagesMotor NemanmulyonoNo ratings yet
- Power FactorDocument42 pagesPower FactormkpqNo ratings yet
- Automatic Power Factor Correction - Electrical Notes & ArticlesDocument17 pagesAutomatic Power Factor Correction - Electrical Notes & ArticlesSNo ratings yet
- Synopsis of Power FactorDocument10 pagesSynopsis of Power FactorRavi TiwariNo ratings yet
- Automatic Power Factor Correction - Electrical Notes & ArticlesDocument12 pagesAutomatic Power Factor Correction - Electrical Notes & ArticlesudhayNo ratings yet
- Synchronous MotorsDocument25 pagesSynchronous MotorsJan Edward L. SuarezNo ratings yet
- Automatic Power Factor Correction Electrical Notes & ArticlesDocument15 pagesAutomatic Power Factor Correction Electrical Notes & ArticlesAnonymous I13s99No ratings yet
- Fig. 2 (A) Self Excited Induction GeneratorDocument7 pagesFig. 2 (A) Self Excited Induction GeneratorLaxmikant BagaleNo ratings yet
- Differences Between Shunt and Series DC Motors On Drilling RigsDocument8 pagesDifferences Between Shunt and Series DC Motors On Drilling RigsSohail ANo ratings yet
- Synchronous CondensersDocument15 pagesSynchronous Condenserspawan ranaNo ratings yet
- Surviving Voltage TransientsDocument3 pagesSurviving Voltage TransientsEeindustrialNo ratings yet
- Power Factor and Energy Instruments ExplainedDocument24 pagesPower Factor and Energy Instruments ExplainedSumeet KumarNo ratings yet
- Synchronous Condensers for Power Factor CorrectionDocument15 pagesSynchronous Condensers for Power Factor CorrectionPawan Rana100% (1)
- Introduction To Power Factor Correction PDFDocument8 pagesIntroduction To Power Factor Correction PDFErlangga SatyawanNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Synchronous condenser theory and applicationsDocument2 pagesSynchronous condenser theory and applicationsVivek SainiNo ratings yet
- Parallel Operation of AC GeneratorsDocument4 pagesParallel Operation of AC Generatorsgsantosh06No ratings yet
- 2006 18 Spring Wiring Matters Power Factor Correction PFCDocument3 pages2006 18 Spring Wiring Matters Power Factor Correction PFCArsyad Harus SemangattNo ratings yet
- Power Factor ImprovementDocument8 pagesPower Factor ImprovementmshahidshaukatNo ratings yet
- Synchronous CondenserDocument2 pagesSynchronous CondenserblaagicaNo ratings yet
- Chapter One: 1.1 Concepts of Power Factor CorrectionDocument37 pagesChapter One: 1.1 Concepts of Power Factor CorrectionyeabNo ratings yet
- How To Select Genset PDFDocument25 pagesHow To Select Genset PDFSaraswatapalit100% (1)
- Ijsea03031002 PDFDocument5 pagesIjsea03031002 PDFAbdul HamidNo ratings yet
- US Motors InformacionDocument15 pagesUS Motors InformacionGiraldoCarpioRamosNo ratings yet
- Field Oriented Control Reduces Motor Size, Cost and Power Consumption in Industrial ApplicationsDocument6 pagesField Oriented Control Reduces Motor Size, Cost and Power Consumption in Industrial ApplicationsnikanikolinaNo ratings yet
- 5 - Correcting Power Factor at Your Motor TerminalsDocument2 pages5 - Correcting Power Factor at Your Motor TerminalsQM_2010No ratings yet
- FAQ Acerca de Drives de Frecuencia VariableDocument9 pagesFAQ Acerca de Drives de Frecuencia Variableluisosesti80No ratings yet
- AC Induction Motor SlipDocument6 pagesAC Induction Motor SlipnotastudentNo ratings yet
- Key Factor Sizing GeneratorDocument2 pagesKey Factor Sizing Generatorjoechengsh0% (1)
- Static Var CompensatorDocument55 pagesStatic Var CompensatorSuresh Nagulavancha50% (2)
- @@power Factor Correction of Coet - 100605Document63 pages@@power Factor Correction of Coet - 100605Sangiwa SalimNo ratings yet
- HYDRO GENERATING UNITS SYNCHRONOUS CONDENSER OPERATIONDocument11 pagesHYDRO GENERATING UNITS SYNCHRONOUS CONDENSER OPERATIONPawan RanaNo ratings yet
- 04 - Improvement of Power FactorDocument29 pages04 - Improvement of Power FactorMohammedAhmadOsamaNo ratings yet
- Power Factor Improvement of Induction Motor by Using Capacitors AbstractDocument3 pagesPower Factor Improvement of Induction Motor by Using Capacitors AbstractG DamarakeswarNo ratings yet
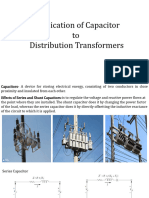
- 8.application of CapacitorsDocument19 pages8.application of CapacitorsImjusttryingtohelpNo ratings yet
- Sizing of Generator SetsDocument4 pagesSizing of Generator Setsjose angel camara santosNo ratings yet
- PF Improve Ment MethodsDocument4 pagesPF Improve Ment MethodsdeepaNo ratings yet
- Condition For Parallel Operation of AlternatorDocument4 pagesCondition For Parallel Operation of AlternatorSyed Ahmed MasoodNo ratings yet
- 07 KalinaeDocument5 pages07 Kalinaepad22089485No ratings yet
- SIZING TRANSFORMERS FOR LARGE MOTOR LOADSDocument20 pagesSIZING TRANSFORMERS FOR LARGE MOTOR LOADSserban_el100% (1)
- APFC PanelDocument8 pagesAPFC PanelAkhilesh KumarNo ratings yet
- Induction Generator: Principle of OperationDocument4 pagesInduction Generator: Principle of OperationASHIM KUMAR SAHU100% (1)
- How Synchronous Motor Is Used For Power Factor Correction?Document10 pagesHow Synchronous Motor Is Used For Power Factor Correction?alisha27No ratings yet
- 45 16255 EE543 2015 1 1 1 Week 8 9Document25 pages45 16255 EE543 2015 1 1 1 Week 8 9Kristel Mae Hertz CastilloNo ratings yet
- AGN 018 - Regenerative Loads & Reverse PowerDocument4 pagesAGN 018 - Regenerative Loads & Reverse PowerolumideNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking MethodsRukkuArunNo ratings yet
- NAGUM PowerBenchmarkingDocument4 pagesNAGUM PowerBenchmarkingCarlnagum 123456789No ratings yet
- Methods For Power Factor ImprovementDocument5 pagesMethods For Power Factor Improvementdabbu2100% (1)
- The Installation of AC Drives Can Yield Some Predictable Benefits and Some Not-So-Predictable Side EffectsDocument3 pagesThe Installation of AC Drives Can Yield Some Predictable Benefits and Some Not-So-Predictable Side EffectsJonathan SantiagoNo ratings yet
- Apnot 125Document4 pagesApnot 125wilson2142No ratings yet
- Pre Lab 6Document4 pagesPre Lab 6Maaz HussainNo ratings yet
- Reactive Power CompensationDocument18 pagesReactive Power CompensationKamugasha KagonyeraNo ratings yet
- Sizing GensetsDocument4 pagesSizing GensetsCarlos BarrazaNo ratings yet
- Speed Control of DC Motor Using PWMDocument23 pagesSpeed Control of DC Motor Using PWMSunitha MaryNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Nitro Pro 8 User Guide EnglishDocument255 pagesNitro Pro 8 User Guide Englishsuasponte2No ratings yet
- Renewable Energy Scenarios For The Kingdom of Saudi ArabiaDocument64 pagesRenewable Energy Scenarios For The Kingdom of Saudi ArabiaTyndall Centre for Climate Change Research100% (3)
- Al BarrakDocument24 pagesAl Barrakmohamad5357No ratings yet
- Tool AttG v2 3 12jan11Document2 pagesTool AttG v2 3 12jan11mohamad5357No ratings yet
- Procurement Best Practice GuidelineDocument17 pagesProcurement Best Practice GuidelineA_tarin100% (1)
- 1361195831-SHTM 00 Version 2.1Document100 pages1361195831-SHTM 00 Version 2.1mohamad5357No ratings yet
- 030 Icmts2012 M10016Document6 pages030 Icmts2012 M10016mohamad5357No ratings yet
- Power Factor Capacitors and Harmonic FiltersDocument64 pagesPower Factor Capacitors and Harmonic FiltersKarteek4uNo ratings yet
- HTM 06-02Document114 pagesHTM 06-02mohamad5357No ratings yet
- IRIS Buildings and EarthquakesDocument18 pagesIRIS Buildings and EarthquakesjflarsenNo ratings yet
- Al BarrakDocument24 pagesAl Barrakmohamad5357No ratings yet
- WG03 Final ReportDocument41 pagesWG03 Final Reportmohamad5357No ratings yet
- 4th Industrialists Forum - The Potential For Energy Efficiency Solutions in KSA - 1215-1330Document12 pages4th Industrialists Forum - The Potential For Energy Efficiency Solutions in KSA - 1215-1330mohamad5357No ratings yet
- Saudi GCC Opportunities June 2012bDocument29 pagesSaudi GCC Opportunities June 2012bmohamad5357No ratings yet
- KS 1878-1-2010 Residential Electricity Supply - Planning DesignDocument63 pagesKS 1878-1-2010 Residential Electricity Supply - Planning Designmohamad5357No ratings yet
- 1Document16 pages1mohamad5357No ratings yet
- Renewable Energy Scenarios For The Kingdom of Saudi ArabiaDocument64 pagesRenewable Energy Scenarios For The Kingdom of Saudi ArabiaTyndall Centre for Climate Change Research100% (3)
- Project Management Manual Design ConstructionDocument94 pagesProject Management Manual Design Constructionelsayedamr80% (5)
- Al BarrakDocument24 pagesAl Barrakmohamad5357No ratings yet
- Gulf Projects Market OutlookDocument20 pagesGulf Projects Market Outlookmohamad5357No ratings yet
- Longtermgenerationplanningforsaudielectricitysectorstudy 3Document133 pagesLongtermgenerationplanningforsaudielectricitysectorstudy 3mohamad5357No ratings yet
- Target Incentive - Final220509Document90 pagesTarget Incentive - Final220509mohamad5357No ratings yet
- 4th Industrialists Forum - The Potential For Energy Efficiency Solutions in KSA - 1215-1330Document12 pages4th Industrialists Forum - The Potential For Energy Efficiency Solutions in KSA - 1215-1330mohamad5357No ratings yet
- Opportunities For Renewable Energy Projects in Saudi Arabia: Stefan Schmitz Hayley Steel Vincent R. GordonDocument3 pagesOpportunities For Renewable Energy Projects in Saudi Arabia: Stefan Schmitz Hayley Steel Vincent R. Gordonmohamad5357No ratings yet
- Saudi GCC Opportunities June 2012bDocument29 pagesSaudi GCC Opportunities June 2012bmohamad5357No ratings yet
- Saudi GCC Opportunities June 2012bDocument29 pagesSaudi GCC Opportunities June 2012bmohamad5357No ratings yet
- Target Incentive - Final220509Document90 pagesTarget Incentive - Final220509mohamad5357No ratings yet
- Project Management Manual Design ConstructionDocument94 pagesProject Management Manual Design Constructionelsayedamr80% (5)
- Flow Chart From CPC To DLP To CMGDDocument4 pagesFlow Chart From CPC To DLP To CMGDSky SawNo ratings yet
- Is Energy Efficiency Worth It? How Improvements Can Save MoneyDocument9 pagesIs Energy Efficiency Worth It? How Improvements Can Save Moneymohamad5357No ratings yet