You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- (GUNSMITHING) The .22 PistolDocument18 pages(GUNSMITHING) The .22 PistolMago Invisivel88% (25)
- Environmental AuditDocument22 pagesEnvironmental AuditungkumariamNo ratings yet
- Nupack User Guide 3.2Document44 pagesNupack User Guide 3.2Dicastelgandolfo VchNo ratings yet
- Training CoursesDocument16 pagesTraining CoursesFeroz KhanNo ratings yet
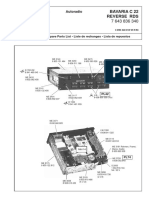
- Bavaria Reverse RdsDocument15 pagesBavaria Reverse RdsDušan JovanovićNo ratings yet
- Data Structures NotesDocument9 pagesData Structures NotesMohammed JeelanNo ratings yet
- Error Codes Samsung SL Fin 501l 502lDocument33 pagesError Codes Samsung SL Fin 501l 502lcesar salasNo ratings yet
- Rockwell DynarixDocument39 pagesRockwell DynarixridipisaNo ratings yet
- Fema 154 FormsDocument3 pagesFema 154 FormslesgiuNo ratings yet
- Pages From 0625 - w15 - QP - 33-06Document2 pagesPages From 0625 - w15 - QP - 33-06lelon ongNo ratings yet
- Tan Tzu enDocument68 pagesTan Tzu enLoc HuynhNo ratings yet
- 09 Technical TablesDocument8 pages09 Technical TablesRuban Vijaya SinghNo ratings yet
- A35 Ostetricia Ginecologia PDFDocument8 pagesA35 Ostetricia Ginecologia PDFAarthiNo ratings yet
- The PA Bible Addn 03 Microphones PDFDocument4 pagesThe PA Bible Addn 03 Microphones PDFjosiasns5257100% (1)
- Torsion MEDocument24 pagesTorsion MEmohamed.hassan031No ratings yet
- PR 1-2Document7 pagesPR 1-2mech bhabhaNo ratings yet
- AIP Puducherry Aerodrome, IndiaDocument13 pagesAIP Puducherry Aerodrome, Indiass khadriNo ratings yet
- Chapter 6 SlidesDocument28 pagesChapter 6 Slidesshinde_jayesh2005No ratings yet
- "Part - I - General Central Services Group B'Document13 pages"Part - I - General Central Services Group B'NarayanaNo ratings yet
- Agc-4 DRH 4189340686 UkDocument222 pagesAgc-4 DRH 4189340686 UkGiangDoNo ratings yet
- Croatia: Approved Port Facilities in CroatiaDocument1 pageCroatia: Approved Port Facilities in CroatiaАлександрNo ratings yet
- GAPS Guidelines: Deep Fat FryersDocument4 pagesGAPS Guidelines: Deep Fat FryersAsad KhanNo ratings yet
- California Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsDocument4 pagesCalifornia Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsAmyra MiaNo ratings yet
- Explosion WeldingDocument22 pagesExplosion WeldingLesther Alexander CorreaNo ratings yet
- Yousif Alotaibi 01 CVDocument3 pagesYousif Alotaibi 01 CVyousefx20No ratings yet
- 92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021Document20 pages92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021trickyggNo ratings yet
- Dual Draw/Dual Return Fuel System TroubleshootingDocument4 pagesDual Draw/Dual Return Fuel System Troubleshootinginformer techNo ratings yet
- c02 Scrubber User ManualDocument30 pagesc02 Scrubber User ManualJomhel CalluengNo ratings yet
- ViO80 1A PDFDocument2 pagesViO80 1A PDFTomislav1998No ratings yet
- f77 f55 User ManualDocument36 pagesf77 f55 User ManualGabi GabrielNo ratings yet