You might also like
- QCM GRH CorrigéDocument6 pagesQCM GRH CorrigéAAAAAA84% (45)
- Exercices Corriges Application Lineaire Et DeterminantsDocument62 pagesExercices Corriges Application Lineaire Et DeterminantsSara Ghazouani86% (7)
- Loi Des SinusDocument6 pagesLoi Des SinusartustNo ratings yet
- Mini Manuel D'electrocinetiqueDocument240 pagesMini Manuel D'electrocinetiqueWissal Ben Slama80% (5)
- 1 - Mécanique Du Point Matériel - Ch2Document37 pages1 - Mécanique Du Point Matériel - Ch2Moh IneNo ratings yet
- MMC Bon Cours PDFDocument172 pagesMMC Bon Cours PDFMeryem Berr67% (3)
- Devoir en Mécanique Des Milieux Continus 12 PDFDocument8 pagesDevoir en Mécanique Des Milieux Continus 12 PDFlinaNo ratings yet
- OK - Installation Montage Et Démontage Des Grues À TourDocument20 pagesOK - Installation Montage Et Démontage Des Grues À TourChaymaa MrharNo ratings yet
- Installations DomestiquesDocument14 pagesInstallations DomestiquesAmin Hammouda100% (1)
- TD1 Holomorph Residus PDFDocument3 pagesTD1 Holomorph Residus PDFSara GhazouaniNo ratings yet
- Chap 1 Mecanique Des StructuresDocument9 pagesChap 1 Mecanique Des Structuresعہبد الہحہلہيہمNo ratings yet
- Chapitre 2 - Systèmes À Un Seul Degré de LibertéDocument78 pagesChapitre 2 - Systèmes À Un Seul Degré de LibertéPFEENo ratings yet
- Chapitre 1 Complet v2Document8 pagesChapitre 1 Complet v2y6mzjj92ycNo ratings yet
- Exercices Corriges Suite de FonctionsDocument14 pagesExercices Corriges Suite de FonctionsMohamed Moudine100% (3)
- MSD Cours1Document12 pagesMSD Cours1saad mouanisNo ratings yet
- 5 Statique Appliquee Poutre Et Structure PlaneDocument12 pages5 Statique Appliquee Poutre Et Structure PlaneSara GhazouaniNo ratings yet
- Exercices MSDDocument88 pagesExercices MSDDounia TiNo ratings yet
- Bcucluj FP 186593 1915-1916 PDFDocument378 pagesBcucluj FP 186593 1915-1916 PDFcatalinschiNo ratings yet
- Hypothèses de La MMC + Cinématique Des Milieux ContinusDocument23 pagesHypothèses de La MMC + Cinématique Des Milieux ContinusAbdessattar AbdouNo ratings yet
- Cours de MR - Ikhrrazen - MMC PDFDocument48 pagesCours de MR - Ikhrrazen - MMC PDFSaid MrfNo ratings yet
- Corrige - Serie1 - Dynamique Des Structures - 2020Document14 pagesCorrige - Serie1 - Dynamique Des Structures - 2020taha fathallahNo ratings yet
- Serie 2 PDFDocument2 pagesSerie 2 PDFmezdou moumene100% (1)
- MF - Chapitre III - Dynamique Des Fluides New Ver 2Document37 pagesMF - Chapitre III - Dynamique Des Fluides New Ver 2Chaimaa EnnouhiNo ratings yet
- Ch0 Notation IdicielleDocument14 pagesCh0 Notation IdicielleFouad KehilaNo ratings yet
- MMCDocument2 pagesMMCmsila samiNo ratings yet
- Corrigé Exercices Optionnels 2018-2019Document5 pagesCorrigé Exercices Optionnels 2018-2019Sarah BhmiNo ratings yet
- Correction EMD 1 MMC 2011Document1 pageCorrection EMD 1 MMC 2011Houcine Cool100% (2)
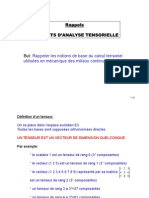
- (A1) Introduction Analyse Tensorielle 3A (2006 - 2007)Document22 pages(A1) Introduction Analyse Tensorielle 3A (2006 - 2007)hamuNo ratings yet
- Elasticite Et RDM Part IIDocument54 pagesElasticite Et RDM Part IIAbdelmoumen GuedriNo ratings yet
- Chapitre I MEF DocumentDocument39 pagesChapitre I MEF DocumentJelly GiroudNo ratings yet
- MMCDocument57 pagesMMCtohouriNo ratings yet
- Examen MMC 2011 2012 PDFDocument2 pagesExamen MMC 2011 2012 PDFMalik MakNo ratings yet
- Bael Introduction EluDocument22 pagesBael Introduction EluBadr FaroukNo ratings yet
- MEF Chap1 Calcul MatricielDocument33 pagesMEF Chap1 Calcul MatricielMohamed SelmiNo ratings yet
- Poly Mécanique Générale PDFDocument46 pagesPoly Mécanique Générale PDFDBE MJSNo ratings yet
- Examen MMC 2011 2012 PDFDocument2 pagesExamen MMC 2011 2012 PDFMalik Mak0% (1)
- Chapitre 11 Tenseur de DéformationDocument10 pagesChapitre 11 Tenseur de DéformationSmail BenidirNo ratings yet
- Cours Calcul de Structure Modélisation PDFDocument114 pagesCours Calcul de Structure Modélisation PDFSoulaimane El LaghdachNo ratings yet
- Document ppt.2Document66 pagesDocument ppt.2Kamel TayahiNo ratings yet
- Fluides Cor PDFDocument2 pagesFluides Cor PDFJuvenal AssogbaNo ratings yet
- Flexion PlaquesDocument13 pagesFlexion PlaquesSourou HoundayiNo ratings yet
- D Introduction À La Dynamique de StructuresDocument10 pagesD Introduction À La Dynamique de Structuresnafaa_ali1375No ratings yet
- Polycopi mdf1 PDFDocument62 pagesPolycopi mdf1 PDFElla KabongoNo ratings yet
- Dynamique Des Structures - Cours2 - 2019 PDFDocument26 pagesDynamique Des Structures - Cours2 - 2019 PDFSamagassi SouleymaneNo ratings yet
- 1 - L3-GC-Calcul Des Structures-Cours 1 - Chap 3Document5 pages1 - L3-GC-Calcul Des Structures-Cours 1 - Chap 3Tarike Zohir100% (1)
- Cours MEF Chapitre IVDocument5 pagesCours MEF Chapitre IVmussariNo ratings yet
- Dchapitre 4Document13 pagesDchapitre 4Salma ElkaddouriNo ratings yet
- Poutre ÉquationsDocument4 pagesPoutre Équationsiraoui jamal (Ebay)No ratings yet
- Correction TD1Document8 pagesCorrection TD1souhayb elmanssouriNo ratings yet
- Série 8 ExercicesDocument1 pageSérie 8 ExercicesAdam MounsiNo ratings yet
- MEF DK Chap2 2 InterpolationDocument21 pagesMEF DK Chap2 2 InterpolationMohamed SelmiNo ratings yet
- Cours1 AmphiDocument35 pagesCours1 AmphiOmar OmarioNo ratings yet
- Livre MMC P RoyesDocument411 pagesLivre MMC P RoyesRachif MesrarNo ratings yet
- 3.dynamique Des Structures 1-SPDDL Equations de Mouvement-1Document60 pages3.dynamique Des Structures 1-SPDDL Equations de Mouvement-1BOUZIANE MessaoudNo ratings yet
- Chapitre 11 Tenseur de Déformation PDFDocument10 pagesChapitre 11 Tenseur de Déformation PDFSmail Benidir100% (1)
- MSDDocument24 pagesMSDMohamedRmouchNo ratings yet
- td4 Fluid PDFDocument5 pagestd4 Fluid PDFAyoub AllaliNo ratings yet
- Ef4 - ch5 - Copie PDFDocument10 pagesEf4 - ch5 - Copie PDFSid'ahmd Sbai0% (1)
- TD Serie2Document3 pagesTD Serie2Nowe Ahmade100% (1)
- STATIQUE-v3 9 5 PDFDocument133 pagesSTATIQUE-v3 9 5 PDFBOCONo ratings yet
- Cours Chap 2 - Hydraulique Maritime - PR Ismail AOUICHE (23-02-2022)Document119 pagesCours Chap 2 - Hydraulique Maritime - PR Ismail AOUICHE (23-02-2022)Abderrahman SrailNo ratings yet
- Etude de La Conjonction Poutre PlaqueDocument137 pagesEtude de La Conjonction Poutre PlaqueHammam KalouchNo ratings yet
- Elasticité Chap1 2019 2020 PDFDocument32 pagesElasticité Chap1 2019 2020 PDFsara marrokNo ratings yet
- Controle 1 MMCDocument2 pagesControle 1 MMCsouhayb elmanssouriNo ratings yet
- MMC Partie 1Document83 pagesMMC Partie 1kimNo ratings yet
- Équations de NavierDocument11 pagesÉquations de NavierRaya TounsyahNo ratings yet
- Corrige Maths4 S4Document4 pagesCorrige Maths4 S4Houda AkoudadNo ratings yet
- Cours RDM1 Partie3Document34 pagesCours RDM1 Partie3Sara GhazouaniNo ratings yet
- 09 An4corrDocument12 pages09 An4corrSara GhazouaniNo ratings yet
- Cours RDM1 Partie3Document34 pagesCours RDM1 Partie3Sara GhazouaniNo ratings yet
- Elec ReseauxDocument4 pagesElec ReseauxSara GhazouaniNo ratings yet
- 04 Sys Lin DirectDocument29 pages04 Sys Lin DirectbdrounNo ratings yet
- Exercices Chapitre1 2 CorrigeDocument2 pagesExercices Chapitre1 2 CorrigeSara GhazouaniNo ratings yet
- SEREXSDocument8 pagesSEREXSSara GhazouaniNo ratings yet
- TD1 SeriesNumDocument6 pagesTD1 SeriesNumSara GhazouaniNo ratings yet
- TD Electronique S 4Document15 pagesTD Electronique S 4Sara GhazouaniNo ratings yet
- Développements LimitésDocument9 pagesDéveloppements LimitésSara GhazouaniNo ratings yet
- AmrounDocument1 pageAmrounSara GhazouaniNo ratings yet
- Fic 00089Document10 pagesFic 00089Sara GhazouaniNo ratings yet
- Freud Et Linconscient - grandeBiblioMarocaineDocument32 pagesFreud Et Linconscient - grandeBiblioMarocaineSara GhazouaniNo ratings yet
- TD2Document1 pageTD2Sara GhazouaniNo ratings yet
- Fic 00083Document10 pagesFic 00083Sara GhazouaniNo ratings yet
- Premier Se NoDocument2 pagesPremier Se NoSara GhazouaniNo ratings yet
- SerieenoDocument8 pagesSerieenoSara GhazouaniNo ratings yet
- Premier Se NoDocument2 pagesPremier Se NoSara GhazouaniNo ratings yet
- Arithmétique Dans Z - DivisibilitéDocument11 pagesArithmétique Dans Z - DivisibilitéSara Ghazouani100% (1)
- IntégrationDocument28 pagesIntégrationSara GhazouaniNo ratings yet
- Arith 1Document9 pagesArith 1Sara GhazouaniNo ratings yet
- 1995TH Maleki K NS19171Document366 pages1995TH Maleki K NS19171sebouppppNo ratings yet
- Texte Feuilles Des ArbresDocument2 pagesTexte Feuilles Des ArbresMouloudNo ratings yet
- Sujets TPsDocument27 pagesSujets TPsAtoui IssamNo ratings yet
- 2.master MFB.S3.OMC. PART1. 2012-13Document14 pages2.master MFB.S3.OMC. PART1. 2012-13Yousra ZrNo ratings yet
- Mac Lisez-Moi Finale 2014Document17 pagesMac Lisez-Moi Finale 2014LaurenceRousselNo ratings yet
- Reglement D Alimentation Des Compteurs Des Heures Supplementaires Et Exceptionnelles 056Document4 pagesReglement D Alimentation Des Compteurs Des Heures Supplementaires Et Exceptionnelles 056Carlos NgNo ratings yet
- Lettre Motivation Conseillere Vente Pret A PorterDocument2 pagesLettre Motivation Conseillere Vente Pret A PorterStephane LoeNo ratings yet
- 3.diététique Du NourrissonDocument22 pages3.diététique Du NourrissonZakaria BouazzaNo ratings yet
- TP N 2-LinuxDocument8 pagesTP N 2-Linuxbouki15No ratings yet
- Plan DaffairesDocument17 pagesPlan DaffairesRamzi BoubaNo ratings yet
- Conseils Et Critères D'évaluation CE Et EEDocument3 pagesConseils Et Critères D'évaluation CE Et EEjennifer vieiraNo ratings yet
- PROFLE+ Engagement de L'enseignantDocument1 pagePROFLE+ Engagement de L'enseignantfakiNo ratings yet
- Ft-Prokils330 AfDocument1 pageFt-Prokils330 AfPablo SizarNo ratings yet
- Fiche Pédagogique - Cours de Culture-ChâteauDocument6 pagesFiche Pédagogique - Cours de Culture-ChâteauRuoya LINo ratings yet
- NDRC2023 - E5A - RCS - Grille D'aide À L'évaluation - AGRICOLE Naomy 2Document17 pagesNDRC2023 - E5A - RCS - Grille D'aide À L'évaluation - AGRICOLE Naomy 2anastase.fbdbNo ratings yet
- Références À Rappeler: Mme Boubaker Beatrice 3 Place de La Commune 38130 EchirollesDocument2 pagesRéférences À Rappeler: Mme Boubaker Beatrice 3 Place de La Commune 38130 EchirollesIskander Ibn AbdelBassit100% (1)
- 3) La SurchauffeDocument3 pages3) La SurchauffemencarelliNo ratings yet
- Psychophysio PDF LMD 2015Document46 pagesPsychophysio PDF LMD 2015AliBenMessaoudNo ratings yet
- Guide D'installation ImageFocus CMEX - CopieDocument6 pagesGuide D'installation ImageFocus CMEX - CopieArseni MaximNo ratings yet
- Compte Rendu Architecture-NouamanDocument22 pagesCompte Rendu Architecture-NouamanNouaman MohamedNo ratings yet
- D4.13.Ch5.sechage Exercices2Document4 pagesD4.13.Ch5.sechage Exercices2Rihab khNo ratings yet
- Cinetique ChimiqueDocument29 pagesCinetique ChimiqueChrist FiagreNo ratings yet
- Swingo 455 EDocument27 pagesSwingo 455 Eangelo fuentesNo ratings yet
- Mandat Etudes Paralleles Bac Rapport JuryDocument92 pagesMandat Etudes Paralleles Bac Rapport Jurycacodak777No ratings yet
- 2-La ConsommationDocument1 page2-La ConsommationHasna JãNo ratings yet