You might also like
- Comb IDE Patterned Piezoelectric MEMS Cantilever For Sensing ApplicationsDocument4 pagesComb IDE Patterned Piezoelectric MEMS Cantilever For Sensing ApplicationsbhawnaNo ratings yet
- A Low Voltage Mems Structure For RF Capacitive Switches: Progress in Electromagnetics Research, PIER 65, 157-167, 2006Document11 pagesA Low Voltage Mems Structure For RF Capacitive Switches: Progress in Electromagnetics Research, PIER 65, 157-167, 2006dharminderaroraNo ratings yet
- Numerical Simulation Nugget Formation 14Document15 pagesNumerical Simulation Nugget Formation 14tobiasNo ratings yet
- Microelectromechanical Systems Vibration Powered Electromagnetic Generator For Wireless Sensor ApplicationsDocument7 pagesMicroelectromechanical Systems Vibration Powered Electromagnetic Generator For Wireless Sensor ApplicationskhodabandelouNo ratings yet
- FEM Simulation of Novel Thermal Microactuator: B.G.Sheeparamatti, J.S.Kadadevarmath, and M.S. HebbalDocument3 pagesFEM Simulation of Novel Thermal Microactuator: B.G.Sheeparamatti, J.S.Kadadevarmath, and M.S. HebbalPedro VargasNo ratings yet
- 2013 GALLINABENASC CAEConference2013Document4 pages2013 GALLINABENASC CAEConference2013Tung ManhNo ratings yet
- Optimization of Piezoelectric Bimorph Actuators With Active Damping For Static and Dynamics LoadsDocument13 pagesOptimization of Piezoelectric Bimorph Actuators With Active Damping For Static and Dynamics LoadsselvamNo ratings yet
- Multiphysics Analysis For The Electromagnetic Vibration AbsorberDocument6 pagesMultiphysics Analysis For The Electromagnetic Vibration AbsorberGillich Gilbert-RainerNo ratings yet
- Analysis of Localized Dissipation Factor MeasuremeDocument5 pagesAnalysis of Localized Dissipation Factor MeasuremeAdamTrisnoizeAgustianNo ratings yet
- Thermal Sensor10Document4 pagesThermal Sensor10rasoulNo ratings yet
- Design Study For An Electro-Thermally Actuator For MicromanipulationDocument8 pagesDesign Study For An Electro-Thermally Actuator For MicromanipulationIonescu ViorelNo ratings yet
- Molecular Dynamic Study For Ultrathin Ni Fe Alloy: 3 M. D. Starostenkov M. M. AishDocument7 pagesMolecular Dynamic Study For Ultrathin Ni Fe Alloy: 3 M. D. Starostenkov M. M. AishIbrahim HasanNo ratings yet
- Nonlinear Tensile and Shear Behavior of Macro Fiber Composite ActuatorsDocument9 pagesNonlinear Tensile and Shear Behavior of Macro Fiber Composite ActuatorsRolando d'HellemmesNo ratings yet
- Study On The Dielectric Characteristics of Gaseous, Liquid, and Solid Insulation Materials For A High Voltage Superconducting ApparatusDocument4 pagesStudy On The Dielectric Characteristics of Gaseous, Liquid, and Solid Insulation Materials For A High Voltage Superconducting ApparatusYousaf KhanNo ratings yet
- Vibrational Behaviour of The Turbo Generator Stator End Winding in CaseDocument12 pagesVibrational Behaviour of The Turbo Generator Stator End Winding in Casekoohestani_afshin50% (2)
- Research On Induction Heating - A ReviewDocument4 pagesResearch On Induction Heating - A ReviewATSNo ratings yet
- Piezoresistive Response of ITO Films Deposited at Room Temperature by Magnetron SputteringDocument5 pagesPiezoresistive Response of ITO Films Deposited at Room Temperature by Magnetron Sputteringjamafisica7981No ratings yet
- Articulo N1 - MEMS Surface Micromachined AccelerometerDocument32 pagesArticulo N1 - MEMS Surface Micromachined AccelerometerCARLOS SEBASTIAN BLAS PERALTANo ratings yet
- PHY2 January 2004Document2 pagesPHY2 January 2004api-3726022No ratings yet
- MPM121 01 AishDocument7 pagesMPM121 01 AishIbrahim HasanNo ratings yet
- Piezoelectric Cantilever Prototype For Energy Harvesting in Computing ApplicationsDocument4 pagesPiezoelectric Cantilever Prototype For Energy Harvesting in Computing ApplicationsEsthi KusumaNo ratings yet
- Modelling and Optimisation of A Bimorph Piezoelectric Cantilever Beam in An Energy Harvesting ApplicationDocument16 pagesModelling and Optimisation of A Bimorph Piezoelectric Cantilever Beam in An Energy Harvesting Applicationiusley.slNo ratings yet
- (1997) The Influence of Connection Stiffness On The Behaviour of Steel Beams in Fire PDFDocument15 pages(1997) The Influence of Connection Stiffness On The Behaviour of Steel Beams in Fire PDFMohammad AshrafyNo ratings yet
- 14ecee Friction DampersDocument8 pages14ecee Friction DampersOscar Zúñiga CuevasNo ratings yet
- Effect of Thermal Restraint On Column Behaviour in A FrameDocument12 pagesEffect of Thermal Restraint On Column Behaviour in A Frameanon_47684961No ratings yet
- Electro-Thermal Modelling of Anode and Cathode in micro-EDMDocument9 pagesElectro-Thermal Modelling of Anode and Cathode in micro-EDMZoltan KantorNo ratings yet
- Design of Micro Resistor Beam Through COMSOL Simulation SoftwareDocument6 pagesDesign of Micro Resistor Beam Through COMSOL Simulation SoftwareinventionjournalsNo ratings yet
- 2 Arm ThermalDocument11 pages2 Arm ThermalnguyenphucthuanNo ratings yet
- Electrothermal Analysis OfElectric Resistance Spot Welding Processes by A 3-D Finite ElementDocument6 pagesElectrothermal Analysis OfElectric Resistance Spot Welding Processes by A 3-D Finite ElementBharadwajaChennupatiNo ratings yet
- Reducing The Distortion in Thin-Sheet Structures MDocument6 pagesReducing The Distortion in Thin-Sheet Structures MJose Marie Rmgrocks BatoNo ratings yet
- 08 Koprivica Milovanovic DjekicDocument13 pages08 Koprivica Milovanovic DjekicDante FilhoNo ratings yet
- 08 2009 151 Wong 04 PDFDocument9 pages08 2009 151 Wong 04 PDFBharath ReddyNo ratings yet
- 03 Yaralioglu 02 PDFDocument4 pages03 Yaralioglu 02 PDFCesar ManNo ratings yet
- Fracture Mechanics Evaluations of Neutron Irradiated Type 321 Austenitk SteelDocument16 pagesFracture Mechanics Evaluations of Neutron Irradiated Type 321 Austenitk SteelSayiram GNo ratings yet
- Simulation of Wrinkle Formation in Free Electromagnetic Tube CompressionDocument8 pagesSimulation of Wrinkle Formation in Free Electromagnetic Tube CompressionKamel FedaouiNo ratings yet
- Microelectronic Engineering: Bongkyun Jang, Seungwoo Han, Jeong-Yup KimDocument4 pagesMicroelectronic Engineering: Bongkyun Jang, Seungwoo Han, Jeong-Yup KimAziz AhmedNo ratings yet
- Control of Longitudinal Bending Distortion of Built-Up Beams by High-Frequency Induction HeatingDocument6 pagesControl of Longitudinal Bending Distortion of Built-Up Beams by High-Frequency Induction Heatinglaz_kNo ratings yet
- Finite Element Analysis of Power TransfoDocument8 pagesFinite Element Analysis of Power TransfoVinciushfb2No ratings yet
- Gain and Fan-Out in A Current-Field Driven Spin Transistor With An Assisting AC Magnetic FieldDocument5 pagesGain and Fan-Out in A Current-Field Driven Spin Transistor With An Assisting AC Magnetic FielddabalejoNo ratings yet
- Numerical Study of Coated Electrical ContactsDocument6 pagesNumerical Study of Coated Electrical ContactsHilary OlsonNo ratings yet
- 1 FEA Stress AnalysisDocument5 pages1 FEA Stress AnalysisAlok SinghNo ratings yet
- Analysis of A Micromachined Piezoelectric Energy HarvesterDocument6 pagesAnalysis of A Micromachined Piezoelectric Energy HarvesterTimberlyNo ratings yet
- Actuation Response of Polyacrylate Dielectric ElastomersDocument7 pagesActuation Response of Polyacrylate Dielectric ElastomersFaisal SabitNo ratings yet
- Palo Saari 2018Document5 pagesPalo Saari 2018Adnan QaseemNo ratings yet
- Modeling of Propane-Air Combustion in Meso-Scale Tubes With Wire MeshDocument6 pagesModeling of Propane-Air Combustion in Meso-Scale Tubes With Wire MeshHERDI SUTANTONo ratings yet
- Niti Wire FatigueDocument12 pagesNiti Wire FatigueVictor EtseNo ratings yet
- Design and Simulation of Carbon Nanotube Based Piezoresistive Pressure SensorDocument5 pagesDesign and Simulation of Carbon Nanotube Based Piezoresistive Pressure SensorTuhinBiswasNo ratings yet
- MEMS Energy HarvesterDocument38 pagesMEMS Energy HarvesterGoutam RanaNo ratings yet
- Comsol For InductionDocument9 pagesComsol For Inductioninfo5280No ratings yet
- Stress Analysis of A High Temperature Superconductor Coil Wound With Bi-2223/Ag Tapes For High Field HTS/LTS NMR Magnet ApplicationDocument5 pagesStress Analysis of A High Temperature Superconductor Coil Wound With Bi-2223/Ag Tapes For High Field HTS/LTS NMR Magnet ApplicationNituNo ratings yet
- Cutting Force Measurement of Electrical Jigsaw byDocument6 pagesCutting Force Measurement of Electrical Jigsaw byKhoaNguyễnNo ratings yet
- Brouwer 2019 Supercond. Sci. Technol. 32 095011Document13 pagesBrouwer 2019 Supercond. Sci. Technol. 32 095011roshanNo ratings yet
- Vibrational Energy Harvesting MEMS ReviewDocument9 pagesVibrational Energy Harvesting MEMS Review胡鈺堂No ratings yet
- Refer en CIA 10Document8 pagesRefer en CIA 10Ianina VioliNo ratings yet
- The Sad ParadoxDocument7 pagesThe Sad ParadoxShobhan K. PradhanNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document5 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Research On Induction Heating - A ReviewDocument5 pagesResearch On Induction Heating - A ReviewKamil IbraNo ratings yet
- Ee6007 Mems Question BankDocument4 pagesEe6007 Mems Question Bankvirudaianand0% (1)
- Mei2019 Void Formation in Solder Joints Under Power Cycling Conditions and Its Effect On ReliabilityDocument7 pagesMei2019 Void Formation in Solder Joints Under Power Cycling Conditions and Its Effect On ReliabilityYangNo ratings yet
- Frame RelayDocument36 pagesFrame RelayIshimaru ThorNo ratings yet
- Digital Transmission Fundamentals 04Document35 pagesDigital Transmission Fundamentals 04IhsanNo ratings yet
- Jaringan Komputer Lanjut - 02Document24 pagesJaringan Komputer Lanjut - 02IhsanNo ratings yet
- (Bertsekas D., Tsitsiklis J.) Parallel and Distrib (Book4You)Document95 pages(Bertsekas D., Tsitsiklis J.) Parallel and Distrib (Book4You)Adam RobinsonNo ratings yet
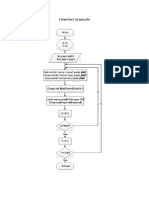
- Flowchart Image StreachingDocument5 pagesFlowchart Image StreachingIhsanNo ratings yet
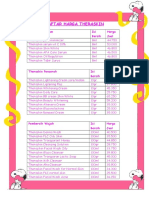
- Info Harga TheraskinDocument7 pagesInfo Harga TheraskinIhsanNo ratings yet
- Bacterial Colony Counter: Manual Vs Automatic: Ms. Hemlata Sethi Ms. Sunita YadavDocument3 pagesBacterial Colony Counter: Manual Vs Automatic: Ms. Hemlata Sethi Ms. Sunita YadavIhsanNo ratings yet
- PX C 3881061Document6 pagesPX C 3881061IhsanNo ratings yet
- 2 TheApplicationsofQualitativeDocument33 pages2 TheApplicationsofQualitativeIhsanNo ratings yet
- Colony Counter 1Document9 pagesColony Counter 1nikitadanniswNo ratings yet
- Turban Dss9e Ch02Document42 pagesTurban Dss9e Ch02o1890446No ratings yet
- Jurnal - Pengaruh Pelatihan Berpikir Positif Pada Efikasi Diri Akademik MahasiswaDocument10 pagesJurnal - Pengaruh Pelatihan Berpikir Positif Pada Efikasi Diri Akademik MahasiswaSari Marta Krisna IINo ratings yet
- Design 2Document29 pagesDesign 2cielo_cetd3670No ratings yet
- Composite Construction Design (ULS Only)Document93 pagesComposite Construction Design (ULS Only)CawanNeroMiranio100% (1)
- STAAD Pro - Lesson 07 - SpecificationsDocument7 pagesSTAAD Pro - Lesson 07 - SpecificationsEBeeNo ratings yet
- Design of Steel Beams and Joists BS 5950Document18 pagesDesign of Steel Beams and Joists BS 5950Rotich Vincent100% (3)
- Monorail Beam Design Q&ADocument33 pagesMonorail Beam Design Q&Aabdulloh_99No ratings yet
- Hilti Shear ConnectorsDocument52 pagesHilti Shear Connectorssuman_civilNo ratings yet
- File StreamerDocument14 pagesFile StreamertuongNo ratings yet
- Astm A254 (1997)Document4 pagesAstm A254 (1997)Yalavarthi ChandrasekharNo ratings yet
- Allowable Stress Design of Concrete MasonryDocument6 pagesAllowable Stress Design of Concrete Masonrying_fernandogalvez2015No ratings yet
- TR 47-180 Floor Deck Profile Data Sheet 9-12-14 PDFDocument3 pagesTR 47-180 Floor Deck Profile Data Sheet 9-12-14 PDFAkhil VNNo ratings yet
- Design of Steel Fibre Reinforced Segmental Lining For The Gold Coast Desal TunnelsDocument8 pagesDesign of Steel Fibre Reinforced Segmental Lining For The Gold Coast Desal Tunnelsrajesh005No ratings yet
- Punching Shear Strength of Flat Slabs: Critical Review of Eurocode 2 and Fib Model Code 2010 Design ProvisionsDocument35 pagesPunching Shear Strength of Flat Slabs: Critical Review of Eurocode 2 and Fib Model Code 2010 Design Provisionstekla gom-lua groupNo ratings yet
- At The Completion of The CourseDocument2 pagesAt The Completion of The Courseoday albuthbahakNo ratings yet
- Chapter 5 SolutionDocument10 pagesChapter 5 SolutionËmêrson SîntujNo ratings yet
- ME2112 - (Part 1) - Shear Stress in Beams-L4Document21 pagesME2112 - (Part 1) - Shear Stress in Beams-L4dinodanoNo ratings yet
- Pyramid Ias Academy: KaraikudiDocument12 pagesPyramid Ias Academy: KaraikudiArrow BuildersNo ratings yet
- PHILIPPINE WOOD and TIMBER DESIGN (Problems With Solutions)Document12 pagesPHILIPPINE WOOD and TIMBER DESIGN (Problems With Solutions)Samuel EsparteroNo ratings yet
- Design of Column (Biaxial Bending) Long ColumnDocument164 pagesDesign of Column (Biaxial Bending) Long Columnvishnumani3011100% (1)
- Buckling of A Simply Supported Rectangular PlateDocument10 pagesBuckling of A Simply Supported Rectangular Plateshimul2008No ratings yet
- RCC Drain DesignDocument39 pagesRCC Drain DesignShubham AgrawalNo ratings yet
- Design-Pad-Chimney-Foundation 1Document25 pagesDesign-Pad-Chimney-Foundation 1melchor100% (2)
- Analytical Modelling of Infilled Frame Structures - A General ReviewDocument18 pagesAnalytical Modelling of Infilled Frame Structures - A General ReviewSuman TiwariNo ratings yet
- Se-50eee Placa MM RBDocument8 pagesSe-50eee Placa MM RBbasabi12No ratings yet
- Spur Gear Problems PDFDocument79 pagesSpur Gear Problems PDFSharmila Shetty100% (1)
- Saddle 1Document3 pagesSaddle 1RUDHRA DHANASEKARNo ratings yet
- X HVB Specification PDFDocument52 pagesX HVB Specification PDFAnonymous 6aGAvbNNo ratings yet
- 7 Composite Beams New (Compatibility Mode)Document17 pages7 Composite Beams New (Compatibility Mode)susan87No ratings yet
- Comparative Study of Analytical and Numerical Algorithms For Designing Reinforced Concrete Sections Under Biaxial BendingDocument10 pagesComparative Study of Analytical and Numerical Algorithms For Designing Reinforced Concrete Sections Under Biaxial BendingDong LINo ratings yet
- Shear Connection of Steel-ConcreteDocument363 pagesShear Connection of Steel-ConcreteMac100% (1)
- HUGHES - Cator and Cribbage Construction of Northern PakistanDocument12 pagesHUGHES - Cator and Cribbage Construction of Northern PakistanFayaz JerovNo ratings yet