You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Valve Body PDFDocument9 pagesValve Body PDFTimur TOT100% (2)
- Sjoblom, J. - Handbook of Emulsion Technology PDFDocument731 pagesSjoblom, J. - Handbook of Emulsion Technology PDFdcharlies92% (13)
- Grundfos S Pump 5 - 29 KW Super VortexDocument20 pagesGrundfos S Pump 5 - 29 KW Super Vortexdalveerchoudhary100% (1)
- LPCHDocument2 pagesLPCHlookb6No ratings yet
- MP3 Player 5W Micro SD Card Lecteur MP3 5W Carte Micro SD Reproductor MP3 DE 5W para Tarjeta Micro SD TR-21Document3 pagesMP3 Player 5W Micro SD Card Lecteur MP3 5W Carte Micro SD Reproductor MP3 DE 5W para Tarjeta Micro SD TR-21lookb6No ratings yet
- Redireccionar Pagina WebDocument1 pageRedireccionar Pagina Weblookb6No ratings yet
- Ingles 2 IntensivoDocument2 pagesIngles 2 Intensivolookb6No ratings yet
- AVI128 Double Internal Fan AlternatorDocument2 pagesAVI128 Double Internal Fan Alternatorlookb6No ratings yet
- A31Document15 pagesA31lookb6No ratings yet
- 80 N 60Document2 pages80 N 60lookb6No ratings yet
- Negative Switching Iq/Iqt Remote Control Circuitry + Stop Relay & Isolated O/C Inputs (24Vdc)Document1 pageNegative Switching Iq/Iqt Remote Control Circuitry + Stop Relay & Isolated O/C Inputs (24Vdc)lookb6No ratings yet
- English V - IntensiveDocument2 pagesEnglish V - Intensivelookb6No ratings yet
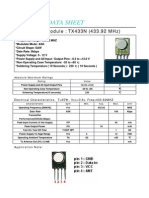
- Transmisor tx433n PDFDocument2 pagesTransmisor tx433n PDFlookb6No ratings yet
- TestDocument2 pagesTestlookb6No ratings yet
- Ofdma: LTE Air Interface CourseDocument63 pagesOfdma: LTE Air Interface CourseAkhtar KhanNo ratings yet
- Curriculum Vitae: Augusto Javier Puican ZarpanDocument4 pagesCurriculum Vitae: Augusto Javier Puican Zarpanfrank_d_1No ratings yet
- BIOS 203: Free Energy Methods Tom MarklandDocument23 pagesBIOS 203: Free Energy Methods Tom MarklandNemanja ĐokovićNo ratings yet
- JDE ApplicationDocument642 pagesJDE ApplicationAnonymous cputyzNo ratings yet
- Ecc Mech Sharq 22 016 Rev 01Document6 pagesEcc Mech Sharq 22 016 Rev 01Muthu SaravananNo ratings yet
- An 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Document4 pagesAn 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Aura Milena Martinez ChavarroNo ratings yet
- Stair Cases DesignDocument19 pagesStair Cases DesignWrishad Zia93% (14)
- Alien Vault Lab2Document28 pagesAlien Vault Lab2DukeNo ratings yet
- 3310 ATF DEXRON III H PDS Vesion 3Document2 pages3310 ATF DEXRON III H PDS Vesion 3luayhabibbNo ratings yet
- IRF350Document7 pagesIRF350sanniviNo ratings yet
- Stay CablesDocument22 pagesStay Cablesalex_g00dyNo ratings yet
- Safety Data Sheet 84989 41 3 enDocument4 pagesSafety Data Sheet 84989 41 3 enAdhiatma Arfian FauziNo ratings yet
- RequirementsDocument18 pagesRequirementsmpedraza-1No ratings yet
- SOP 829 - 032 Check-Reset KEMS, CrownomaticDocument2 pagesSOP 829 - 032 Check-Reset KEMS, CrownomaticAnonymous XbmoAFtINo ratings yet
- Comfort and Performance Your Customers DemandDocument18 pagesComfort and Performance Your Customers Demandgizex2013No ratings yet
- Module002 LaboratoryExercise002Document2 pagesModule002 LaboratoryExercise002Joaquin SmithNo ratings yet
- Chapter 19A ConcreteDocument10 pagesChapter 19A ConcreteMofasa ENo ratings yet
- Asme Wec Chapter Annual ReportDocument12 pagesAsme Wec Chapter Annual ReportManazar HussainNo ratings yet
- Solar Module CellDocument4 pagesSolar Module CellVinod BabhaleNo ratings yet
- Selling Your Contents To The WorldDocument25 pagesSelling Your Contents To The WorldCreative Malaysia100% (1)
- Receiving Material Procedure (Done) (Sudah Direvisi)Document8 pagesReceiving Material Procedure (Done) (Sudah Direvisi)Hardika SambilangNo ratings yet
- AquaCal Tropical Brochure PDFDocument2 pagesAquaCal Tropical Brochure PDFJC ParedesNo ratings yet
- GIS Project Management GIS Project Management: Quality Issues Quality IssuesDocument1 pageGIS Project Management GIS Project Management: Quality Issues Quality IssuesLeo DobreciNo ratings yet
- SinxbyxDocument9 pagesSinxbyxGreeshmaNo ratings yet
- 4 Rec. ITU-R BS.775-3: Reference Loudspeaker Arrangement With Loudspeakers L/C/R and LS/RSDocument3 pages4 Rec. ITU-R BS.775-3: Reference Loudspeaker Arrangement With Loudspeakers L/C/R and LS/RSPaulo PiresNo ratings yet
- Product Management Self-Learning ManualDocument261 pagesProduct Management Self-Learning ManualAbhishek Arekar100% (1)