You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Sony HCD Dx8Document66 pagesSony HCD Dx8videoson100% (1)
- Belbin's Team ModelDocument2 pagesBelbin's Team Modelsonu_saisNo ratings yet
- Alsabei ThesisDocument279 pagesAlsabei Thesisrayzo2182No ratings yet
- Resume MullinsDocument4 pagesResume Mullinsapi-236735643No ratings yet
- Practicality and Efficiency: Presented By: Grace EscabasDocument11 pagesPracticality and Efficiency: Presented By: Grace EscabasMiaeNo ratings yet
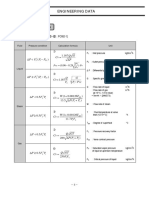
- Engineering Data: 2. CV CalculationDocument1 pageEngineering Data: 2. CV Calculationdj22500No ratings yet
- CBSE Class 6 - MCQ Separation of SubstancesDocument4 pagesCBSE Class 6 - MCQ Separation of Substancesvinod1577100% (1)
- Grieving The Loss of A Life You WantedDocument11 pagesGrieving The Loss of A Life You WantedNiftyNo ratings yet
- 4 MFL67658602 00 160519 1Document329 pages4 MFL67658602 00 160519 1Cédric MorisotNo ratings yet
- Kids 2: INSTITUTO CAMBRIDGE de Cultura Inglesa - EXÁMENES 2019Document2 pagesKids 2: INSTITUTO CAMBRIDGE de Cultura Inglesa - EXÁMENES 2019Evaluna MoidalNo ratings yet
- Tutorial Chapter 2Document5 pagesTutorial Chapter 2Naasir SheekeyeNo ratings yet
- Research TopicsDocument15 pagesResearch TopicsmalinksNo ratings yet
- Is 800-2007 - Indian Code of Practice For Construction in SteelDocument41 pagesIs 800-2007 - Indian Code of Practice For Construction in SteelshiivendraNo ratings yet
- FLIGHT Punta Arenas - SantiagoDocument3 pagesFLIGHT Punta Arenas - SantiagoАртем ПичугинNo ratings yet
- Qüestionari KPSI.: ActivitiesDocument2 pagesQüestionari KPSI.: ActivitiesfrancisNo ratings yet
- CSR of Pidilite PDFDocument2 pagesCSR of Pidilite PDFtarang keraiNo ratings yet
- Hw1 2 SolutionsDocument7 pagesHw1 2 SolutionsFrancisco AlvesNo ratings yet
- STEEL STRUCTURES KHARGHAR SKYWALK AND NIFT INSTITUTE Ms PPT 2007Document30 pagesSTEEL STRUCTURES KHARGHAR SKYWALK AND NIFT INSTITUTE Ms PPT 2007Harsh chhedaNo ratings yet
- H5P Active Learning Guide: HERDSA Workshop MaterialDocument7 pagesH5P Active Learning Guide: HERDSA Workshop Materialgeorgemarian_manea100% (1)
- Dystopian LiteratureDocument3 pagesDystopian LiteratureLol LeeNo ratings yet
- 4 Chacon Et Al 2004Document7 pages4 Chacon Et Al 2004Luis Serrano CortezNo ratings yet
- Porphyry Tin Deposits in BoliviaDocument15 pagesPorphyry Tin Deposits in Boliviasebastian tiriraNo ratings yet
- C79 Service Kits and Parts List: CAP179 - C79 Aug 2017 - Rev ADocument32 pagesC79 Service Kits and Parts List: CAP179 - C79 Aug 2017 - Rev Arobert100% (2)
- Revise Chap 12Document14 pagesRevise Chap 12RACHEL DAMALERIONo ratings yet
- SSPC Monitoreo y Control de Condiciones AmbientalesDocument4 pagesSSPC Monitoreo y Control de Condiciones AmbientalesRony Ruiz100% (1)
- UA5000 V100R019C06 Hardware Description 05 PDFDocument563 pagesUA5000 V100R019C06 Hardware Description 05 PDFdabouzia slahNo ratings yet
- TEST Unit 5Document5 pagesTEST Unit 5Giang Nguyen Thi ThuNo ratings yet
- Rack Interface Module 3500 20SDocument71 pagesRack Interface Module 3500 20SmaheshNo ratings yet
- Pepperdine Resume Ico William Kong Updated BDocument1 pagePepperdine Resume Ico William Kong Updated Bapi-278946246No ratings yet
- Student Camps 2022 - Grade 6 Science Curriculum Based Test BookletDocument58 pagesStudent Camps 2022 - Grade 6 Science Curriculum Based Test Bookletthank you GodNo ratings yet