Automatic generation control of an interconnected hydrothermal
power system considering superconducting magnetic energy storage
Rajesh Joseph Abraham, D. Das
*
, Amit Patra
Department of Electrical Engineering, Indian Institute of Technology, Kharagpur 721 302, India
Received 3 February 2006; received in revised form 18 November 2006; accepted 8 January 2007
Abstract
This paper presents the analysis of automatic generation control (AGC) of an interconnected hydrothermal power system in the pres-
ence of generation rate constraints (GRCs). The improvement of AGC with the addition of a small capacity superconducting magnetic
energy storage (SMES) unit in either, as well as in both the areas are studied. Time domain simulations are used to study the performance
of the power system and control logic. The optimal values of the integral gain settings are obtained using integral squared error (ISE)
technique by minimising a quadratic performance index. Suitable method for controlling the SMES unit is described. Analysis reveals
that SMES unit tted in either of the areas is as eective as SMES units tted in both the areas and improves the dynamic performances
to a considerable extent following a load disturbance in either of the areas.
2007 Elsevier Ltd. All rights reserved.
Keywords: AGC; Hydrothermal; Power system; SMES
1. Introduction
Electric power systems operating in an interconnected
grid are normally composed of control areas or regions
and interconnected through tie-lines. Each control area
is obliged to manage in parallel, the important tasks of
covering the customers load requirements as well as main-
taining the interchanged power and the system frequency
at their respective scheduled values so that the power sys-
tem remains at its nominal state characterised by nominal
system frequency, voltage prole and load ow congura-
tion. To maintain the power system in its nominal state,
at each instant, the generated power should exactly match
the demanded power plus the associated system losses.
But in a practical power system, the load is changing con-
tinuously. Further, the ability of the generation to track
the changing load is limited due to physical/technical con-
siderations. Thus, the exact power generationconsump-
tion equilibrium and hence, the nominal state of the
power system cannot be satised in practice. Thus, auto-
matic generation control (AGC) of an interconnected
power system is concerned with two main objectives:
instantaneously matching the generation to the system
load and adjusting the system frequency and tie-line load-
ings at their scheduled values as close as possible so that,
the quality of the power delivered is maintained at the
requisite level.
Literature survey shows that, most of the works con-
cerned with AGC of interconnected power systems pertain
to tie-line bias control strategy [110]. Supplementary con-
trollers are designed to regulate the area control errors to
zero eectively. Even in the case of small load disturbances
and with the optimised gain for the supplementary control-
lers, the power frequency and the tie-line power deviations
persist for a long duration. In these situations, the governor
system may no longer be able to absorb the frequency uc-
tuations due to its slow response [1]. Thus, to compensate
for the sudden load changes, an active power source with
fast response such as an superconducting magnetic energy
0142-0615/$ - see front matter 2007 Elsevier Ltd. All rights reserved.
doi:10.1016/j.ijepes.2007.01.004
*
Corresponding author. Tel.: +91 3222 79507; fax: +91 3222 55303.
E-mail address: ddas@ee.iitkgp.ernet.in (D. Das).
www.elsevier.com/locate/ijepes
Electrical Power and Energy Systems 29 (2007) 571579
storage (SMES) unit is expected to be the most eective
countermeasure.
The reported works [1113] further shows that, SMES
is located in each area of the two-area system for AGC.
With the use of SMES in both the areas, frequency devi-
ations in each area are eectively suppressed. However, it
may not be economically feasible to use SMES in every
area of a multi-area interconnected power system. There-
fore, it is advantageous if an SMES located in an area is
available for the control of frequency of other intercon-
nected areas.
Further, literature survey shows that, no work has been
carried out for the AGC of interconnected hydrothermal
power system considering an SMES unit. An intercon-
nected hydrothermal system involves widely dierent char-
acteristics for the hydro and thermal subsystems.
Moreover, the eects of dierent Generation Rate Con-
straints (fairly slow response for the thermal plant and
quite fast response for the hydro plant) on the selection
of optimum controller settings for the thermal and hydro
areas and on the system dynamic performance considering
an SMES unit are yet to be established.
In view of the above, the main objective of the present
work is to determine the optimum values of integral gain
settings in the control areas in the presence of GRCs con-
sidering an SMES unit in either thermal or hydro area as
well as both the areas. Eect of SMES on the dynamic per-
formances is also studied following a step load disturbance
in either of the areas.
2. System investigated
The AGC system investigated is composed of an inter-
connection of two areas. Area 1 comprises a non reheat
thermal system and area 2 comprises a hydro system. Typ-
ical generation rate constraints of 10%/min for thermal
area and 4.5%/s (270%/min) for raising generation and
6%/s (360%/min) for lowering generation in the hydro area
are considered as in the IEEE Committee Report on power
plant response [14]. The detailed transfer function models
of speed governors and turbines are discussed and devel-
oped in the IEEE Committee Report on Dynamic Models
for Steam and Hydro Turbines in Power System Studies
[15]. The small perturbation transfer function block dia-
gram model of the two-area hydrothermal system is shown
in Fig. 1 with SMES unit in area 1. However, the eect of
SMES is examined by tting it to both as well as, either of
the areas. A step load perturbation of 1% of the nominal
loading is considered in either of the areas. Nominal
parameters of the system are given in the Appendix.
3. State space representation
The two-area interconnected hydrothermal power sys-
tem linearised around an operating reference point can be
described by the standard state space equation as
_
X AX BU CP 1
where X, U and P are the state, control and disturbance
vectors respectively and A, B and C are real constant matri-
ces of appropriate dimensions which in turn depend on the
system parameters and the operating point. For the system
under consideration,
X Df
1
; Df
2
; DP
tie12
; DP
g1
; DP
g2
; DP
r1
; DP
t1
; DP
t2
T
2
U u
1
; u
2
T
3
P DP
d1
; DP
d2
T
: 4
The state variables chosen are as shown in the power sys-
tem model of Fig. 1.
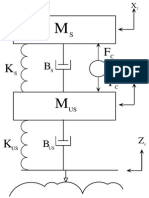
4. Conguration of the SMES in the power system
The schematic diagram in Fig. 2 shows the thyristor
controlled SMES unit conguration. In the SMES unit,
a dc magnetic coil is connected to the ac grid through a
Power Conversion System (PCS) which includes an inver-
ter/rectier. The superconducting coil is contained in a
helium vessel. Heat generated is removed by means of a
low-temperature refrigerator. Helium is used as the work-
ing uid in the refrigerator as it is the only substance that
can exist as either a liquid or a gas at the operating tem-
perature which is near absolute zero. The current in the
superconducting coil will be tens of thousands or hun-
dreds of thousands of amperes. No ac power system nor-
mally operates at these current levels and hence a
Nomenclature
T
P1
, T
P2
power system time constants
K
P1
, K
P2
power system gains
T
T
turbine time constant
T
G
governor time constant of thermal area
T
W
water time constant
T
R
, T
1
, T
2
time constants of the hydro governor
R
1
, R
2
governor speed regulation parameter of thermal
and hydro areas, respectively
P
R1
, P
R2
rated area capacities (a
12
= P
R1
/P
R2
)
T
12
synchronising coecient
B
1
, B
2
frequency bias constant of thermal and hydro
areas, respectively
K
I1
, K
I2
integral gains of thermal and hydro areas,
respectively
572 R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579
transformer is mounted on each side of the converter unit
to convert the high voltage and low current of the ac sys-
tem to the low voltage and high current required by the
coil. The energy exchange between the superconducting
coil and the electric power system is controlled by a line
commutated converter. To reduce the harmonics pro-
duced on the ac bus and in the output voltage to the coil,
a 12-pulse converter is preferred.
The superconducting coil can be charged to a set value
from the grid during normal operation of the power sys-
tem. Once the superconducting coil gets charged, it con-
ducts current with virtually no losses [1113,16] as the
P1
P1
sT 1
K
+ T
sT 1
1
+
G
sT 1
1
+ s
K
I1
B
1
1
R
1
+
+
+
s
T 2
12
+
+
P2
sT 1
P2
K
+
2
R
sT 1
sT 1
+
+
1
sT 1
1
+ s
K
I2
B
2
2
R
1
a
12
a
12
W
W
0.5sT 1
sT 1
+
+
+
+ +
d2
P
1
f
2
f
tie12
P
g1
P
g2
P
t1
t2
P
r1
P
Area Hydro
SMES
d1
P
1
Error
Area Thermal
+
+
Fig. 1. The two area hydrothermal block diagram model with the SMES unit in thermal area.
E
d
L
I
d
To 3 - phase
AC system
bus
step down
transformer
/ Y Y
12-pulse
bridge
converter
Super
conducting
Magnetic Coil
D
R
Bypass
SCRs
DC breaker
Dump
Resistor
Fig. 2. SMES circuit diagram.
R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579 573
coil is maintained at extremely low temperatures. When
there is a sudden rise in the load demand, the stored
energy is almost released through the PCS to the power
system as alternating current. As the governor and other
control mechanisms start working to set the power sys-
tem to the new equilibrium condition, the coil current
changes back to its initial value. Similar action occurs
during sudden release of loads. In this case, the coil
immediately gets charged towards its full value, thus
absorbing some portion of the excess energy in the sys-
tem and as the system returns to its steady state, the
excess energy absorbed is released and the coil current
attains its normal value.
The control of the converter ring angle a provides the
dc voltage appearing across the inductor to be continu-
ously varying within a certain range of positive and nega-
tive values. The inductor is initially charged to its rated
current I
d0
by applying a small positive voltage. Once the
current reaches its rated value, it is maintained constant
by reducing the voltage across the inductor to zero since
the coil is superconducting.
Neglecting the transformer and the converter losses, the
dc voltage is given by [17]
E
d
2V
d0
cos a 2I
d
R
C
; 5
where E
d
is the dc voltage applied to the inductor in kV, a
is the ring angle in degrees, I
d
is the current owing
through the inductor in kA, R
C
is the equivalent commu-
tating resistance in kX and V
d0
is the maximum circuit
bridge voltage in kV. Charging and discharging of the
SMES unit is controlled through the change of commuta-
tion angle a. If a is less than 90, converter acts in the con-
verter mode (charging mode) and if a is greater than 90,
the converter acts in the inverter mode (discharging
mode).
5. Control of SMES unit
When power is to be pumped back into the grid in the
case of a fall in frequency due to sudden loading in the
area, the control voltage E
d
is to be negative since the cur-
rent through the inductor and the thyristors cannot change
its direction. The incremental change in the voltage applied
to the inductor is expressed as
DE
d
K
SMES
1 sT
DC
DError
1
6
where, DE
d
is the incremental change in converter voltage;
T
DC
is the converter time delay; K
SMES
is the gain of the
control loop and DError is the input signal to the SMES
control logic. The inductor current deviation is given by
DI
d
DE
d
sL
7
In this work, area control error (ACE) of area 1 is con-
sidered as the input signal to the SMES control logic (i.e.,
DError
1
= ACE
1
). The area control error of the two areas
are dened as
ACE
i
B
i
Df
i
DP
tieij
; i; j 1; 2; 8
where Df
i
is the change in frequency of area i and DP
ij
is the
change in tie-line power ow out of area ij. Thus, from
Eqs. (6) and (8),
DE
d
K
SMES
1 sT
DC
B
1
Df
1
DP
tie12
9
Note that DError
1
= ACE
1
= (B
1
D f
1
+ DP
tie12
). How-
ever, it is reported in [1113] that, the inductor current in
the SMES unit will return to its nominal value very slowly
only if Eq. (9) is used. But, the inductor current must be
restored to its nominal value quickly after a system distur-
bance so that it can respond to the next load perturbation
immediately. Hence, the inductor current deviation can be
sensed and used as a negative feedback signal in the SMES
control loop so that the current restoration to its nominal
value can be enhanced. The block diagram representation
of SMES incorporating the negative inductor current devi-
ation feedback is shown in Fig. 3. Thus the dynamic equa-
tions for the inductor voltage deviation and current
deviation of the SMES unit area
DE
d
1
1 sT
DC
K
SMES
B
1
Df
1
DP
tie12
K
id
DI
d
10
SMES
K
DC
sT 1
1
+
sL
1
K
id
I
d0
d
I
d
E
+ +
+
sm
P
1
Error
d d0
I I +
d
E
Fig. 3. SMES block diagram with negative inductor current deviation feedback.
574 R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579
6. Optimisation of the integral gain settings (K
I1
and K
I2
)
The optimum integral gain settings of the integral con-
trollers are obtained using integral squared error (ISE)
technique. A characteristic of the ISE criterion is that, it
weighs large errors heavily and small errors lightly. A qua-
dratic performance index
J
Z
t
0
Df
2
1
Df
2
2
DP
2
tie12
dt 11
Table 1
Optimal integral gain settings for thermal and hydro areas
Area Without SMES unit With SMES unit in thermal area With SMES unit in hydro area With SMES unit in both areas
Thermal K
I1
= K
I1opt
= 0.198 K
I1
= K
I1opt
= 0.531 K
I1
= K
I1opt
= 0.252 K
I1
= K
I1opt
= 0.383
Hydro K
I2
= K
I2opt
= 0.047 K
I2
= K
I2opt
= 0. 469 K
I2
= K
I2opt
= 1.049 K
I2
= K
I2opt
= 1.397
0 50 100 150
-0.06
-0.04
-0.02
0
0.02
0.04
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
0 50 100 150
-0.06
-0.04
-0.02
0
0.02
0.04
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
0 50 100 150
-8
-6
-4
-2
0
2
4
x 10
-3
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
Time(s)
f
1
(
H
z
)
f
2
(
H
z
)
Time(s)
P
t
i
e
1
2
(
p
u
M
W
)
Time(s)
Fig. 4. Dynamic responses for Df
1
, Df
2
and DP
tie12
with 1% step load disturbance in the thermal area.
R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579 575
is minimised for 1% step load disturbance in either of the
areas for obtaining the optimum values of integral gain set-
tings without the SMES unit. Since the two areas consist of
dierent types of units, the optimum gain settings are ob-
tained on an individual basis by considering the other area
uncontrolled following the approaches of [18,19]. For
determining the optimum integral gain settings with the
SMES unit, the same procedure is repeated with ACE
1
as
the control signal to the SMES unit in area 1 (i.e., DEr-
ror
1
= ACE
1
). Table 1 shows the optimal integral gain set-
tings of area 1 and area 2 respectively from which, it may
be noted that the optimum values or the integral gain set-
tings with SMES unit are much higher than those without
the SMES unit.
7. Dynamic responses and discussions
Simulation studies are performed to investigate the per-
formance of the two-area hydrothermal system without
and with SMES unit in area 1 considering GRC. A step
load disturbance of 1% of the nominal loading is consid-
ered in either of the areas.
Fig. 4 gives the dynamic responses for the thermal and
hydro area frequency deviations and inter-area tie-power
oscillations with 1% step load disturbance in the thermal
area without SMES as well as, with an SMES unit in ther-
mal, hydro and both the areas. It can be observed that, the
transient behaviour of area frequencies and tie-power have
improved signicantly in terms of peak deviations and set-
tling time in the presence of the SMES unit.
Fig. 5 shows the generation responses for both the
thermal and hydro areas (i.e., DP
g1
and DP
g2
) without
and with SMES unit in area 1 for 1% step load distur-
bance in area 1. It may be noted that, as the step load dis-
turbance has occurred in the thermal area, the thermal
unit should adjust its output at the earliest, so as to take
up the local load perturbation in its area as per its obliga-
tion as reected in Fig. 5a. Further, as per the approved
practices of interconnected operations, area 2 need not
contribute to the local load uctuation in area 1 and
hence should settle down to steady state value of zero
as early as possible and this is reected in Fig. 5b. It
may be noted that the initial negative deection of the
transient response of the output of the hydro unit is
attributed to water hammer eect.
Hence, from Figs. 4 and 5, it is seen that SMES in both
the areas and SMES in either of the areas improves the
dynamic performances signicantly. However, from the
0 50 100 150
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
0 50 100 150
-6
-4
-2
0
2
4
6
8
10
x 10
-3
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
Time(s)
P
g
1
(
p
.
u
.
M
W
)
P
g
2
(
p
.
u
.
M
W
)
Time(s)
Fig. 5. Generation responses for the thermal and hydro units (DP
g1
and DP
g2
) with 1% step load disturbance in the thermal area.
576 R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579
point of view of economy, SMES in either of the areas may
be preferred.
Similar ndings were also observed with a step load per-
turbation of 1% in the hydro area as shown in Figs. 6 and
7.
8. Conclusions
A comprehensive mathematical model for the AGC of
a two area interconnected hydrothermal power system t-
ted with SMES unit in either thermal or hydro area as
well as both the areas has been presented in this paper.
The generation rate constraints for the thermal and
hydro systems have been considered in the analysis.
The system frequency and tie-line power oscillations
due to small load disturbances were found to persist
for a longer duration even with optimal gain settings of
integral controllers. It has been shown that these oscilla-
tions can be eectively damped out with the use of a
small capacity SMES unit in either of the areas following
a step load disturbance. It has also been observed that
the use of ACE for the control of SMES unit substan-
tially reduces the peak deviations of frequencies and
tie-power responses.
0 50 100 150
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
0 50 100 150
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
0 50 100 150
-4
-2
0
2
4
6
8
10
x 10
-3
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
Time(s)
f
1
(
H
z
)
Time(s)
Time(s)
f
2
(
H
z
)
P
t
i
e
1
2
(
p
u
M
W
)
Fig. 6. Dynamic responses for Df
1
, Df
2
and DP
tie12
with 1% step load disturbance in the hydro area.
R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579 577
Acknowledgements
Rajesh Joseph Abraham duly acknowledges the Grant
and support from the All India Council for Technical Edu-
cation (A.I.C.T.E.), New Delhi, India in the form of Na-
tional Doctoral Fellowship (NDF 2003) awarded to him,
with which this work was carried out.
Appendix
(A) System Data
K
P1
= K
P2
= 120 Hz/p.u. MW
T
P1
= T
P2
= 20 s
R
1
= R
2
= 2.4 Hz/p.u. MW
B
1
= B
2
= 0.4249
T
G
= 0.08 s
T
T
= 0.3 s
T
12
= 0.0866
T
1
= 41.6 s
T
2
= 0.513 s
T
R
= 5 s
T
W
= 1 s
D
1
= D
2
= 8.333 10
3
p.u. MW/Hz
P
R1
= P
R2
= 1200 MW
(B) SMES Data
L = 2.65 H
T
DC
= 0.03 s
K
SMES
= 100 kV/unit MW
K
id
= 0.2 kV/kA
I
d0
= 4.5 kA
References
[1] Elgerd OI, Fosha CE. Optimum megawatt frequency control of
multi-area electric energy systems. IEEE Trans Power Syst 1970;PAS-
89:55663.
[2] Fosha CE, Elgerd OI. The megawatt frequency control problem: a
new approach via optimal control theory. IEEE Trans Power Syst
1970;PAS-89:56377.
0 50 100 150
-2
0
2
4
6
8
x 10
-3
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
0 50 100 150
0
2
4
6
8
10
12
14
16
x 10
-3
SMES Unit in Both Areas
SMES Unit in Hydro Area
No SMES Unit
SMES Unit in Thermal Area
Time (s)
Time (s)
P
g
1
(
p
.
u
.
M
W
)
P
g
2
(
p
.
u
.
M
W
)
a
b
Fig. 7. Generation responses for the thermal and hydro units (DP
g1
and DP
g2
) with 1% step load disturbance in the hydro area.
578 R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579
[3] Tanaka E, Hasegawa J. Decentralised load frequency control on each
power plant. Electr Eng Jpn 1990;111 (7):509.
[4] Aldeen M, Trinh H. Load frequency control of interconnected power
systems via constrained feedback control schemes. Comput Electr
Eng 1994;20 (1):7188.
[5] Nanda J, Kaul BL. Automatic generation control of an intercon-
nected power system. Proc IEE 1978;125 (5):38590.
[6] Calovic M. Linear regulator design for load and frequency control.
IEEE Trans Power Syst 1972;PAS-91:227185.
[7] Miniesy SM, Bohn EV. Optimum load frequency continuous control
with unknown deterministic power demand. IEEE Trans Power Syst
1972;PAS-91:19105.
[8] Bengiamin NN, Chan WC. Multilevel load frequency control of
interconnected power systems. Proc IEE 1978;125 (6):5216.
[9] Pan CT, Liaw CM. An adaptive controller for load frequency
control. IEEE Trans Power Syst 1989;4 (1):1228.
[10] Bengiamin N, Chan W. Variable structure control of electric
power generation. IEEE Trans Power Syst 1982;PAS-101
(2):37680.
[11] Banerjee S, Chatterjee JK, Tripathy SC. Application of magnetic
energy storage unit as continuous var controller. IEEE Trans Energy
Conver 1990;5 (1):3945.
[12] Tripathy SC, Kalantar M, Balasubramanian R. Dynamics and
stability of wind and diesel turbine generators with superconducting
magnetic energy storage unit on an isolated power system. IEEE
Trans Energy Conver 1991;6 (4):57985.
[13] Banerjee S, Chatterjee JK, Tripathy SC. Application of magnetic
energy storage unit as load frequency stabiliser. IEEE Trans Energy
Conver 1990;5 (1):4651.
[14] IEEE Working Group on Power Plant Response to Load Changes.
MW response of fossil fuelled steam units. IEEE Trans Power Ap
Syst 1973; PAS-92(2): 45563.
[15] IEEE Committee Report. Dynamic models for steam and hydro
turbines in power system studies. IEEE Trans Power Ap Syst 1973;
PAS-92(6): 190415.
[16] Demiroren A, Yesil E. Automatic generation control with fuzzy logic
controllers in the power system including SMES units. Electr Power
Energy Syst 2004;26:291305.
[17] Kimbark EW. Direct Current Transmission, vol. 1. New York: John
Wiley; 1971. p. 107.
[18] Kothari ML, Satsangi PS, Nanda J. Automatic generation control of
an interconnected Hydrothermal system in continuous and discrete
mode considering Generation Rate Constraints. IEE Proc 1983;130
(D-1):1721.
[19] Das D, Nanda J, Kothari ML, Kothari DP. Automatic Generation
Control of a Hydrothermal system with new area control error
considering Generation Rate Constraints. Electr Mach Power Syst
1990;18:46171.
R.J. Abraham et al. / Electrical Power and Energy Systems 29 (2007) 571579 579
You might also like
- M.Tech CS May 2022 0Document44 pagesM.Tech CS May 2022 0RajeshJosephAbrahamEdasseriathuNo ratings yet
- AVC612 Syllabus 2013 123Document1 pageAVC612 Syllabus 2013 123RajeshJosephAbrahamEdasseriathuNo ratings yet
- 91785v00 NN09 StudentCompetitionsDocument4 pages91785v00 NN09 StudentCompetitionsRajeshJosephAbrahamEdasseriathuNo ratings yet
- Dmcs 0708Document327 pagesDmcs 0708RajeshJosephAbrahamEdasseriathuNo ratings yet
- Handbook of Operational Amplifier ApplicationsDocument94 pagesHandbook of Operational Amplifier Applicationshermiit89% (9)
- Constitution of The IEEE Student Branch123Document9 pagesConstitution of The IEEE Student Branch123RajeshJosephAbrahamEdasseriathuNo ratings yet
- SSI Award Nomination Form for Young Scientist in Systems Theory/ApplicationDocument4 pagesSSI Award Nomination Form for Young Scientist in Systems Theory/ApplicationRajeshJosephAbrahamEdasseriathuNo ratings yet
- SOFTDocument2 pagesSOFTRajeshJosephAbrahamEdasseriathuNo ratings yet
- Some Questions Which May Be Useful in Self - AssessmentDocument8 pagesSome Questions Which May Be Useful in Self - AssessmentRajeshJosephAbrahamEdasseriathu100% (1)
- Matlab Simulink DC MotorDocument12 pagesMatlab Simulink DC Motorkillua142100% (4)
- Taylor & Francis JournalDocument3 pagesTaylor & Francis JournalRajeshJosephAbrahamEdasseriathuNo ratings yet
- Biometrics author submission guide LATEX filesDocument13 pagesBiometrics author submission guide LATEX filesRajeshJosephAbrahamEdasseriathuNo ratings yet
- Bilateral Load Following in A Restructured Power System With Local ControllersDocument6 pagesBilateral Load Following in A Restructured Power System With Local ControllersRajeshJosephAbrahamEdasseriathuNo ratings yet
- K A Navas, PHD Principal, LBSCE, KasaragodDocument19 pagesK A Navas, PHD Principal, LBSCE, KasaragodRajeshJosephAbrahamEdasseriathuNo ratings yet
- Matlab Simulink DC MotorDocument12 pagesMatlab Simulink DC Motorkillua142100% (4)
- Indian Institute Of: Space Science and TechnologyDocument57 pagesIndian Institute Of: Space Science and TechnologyShuvadeep SahaNo ratings yet
- AmsDocument1 pageAmsRajeshJosephAbrahamEdasseriathuNo ratings yet
- Op AmpDocument8 pagesOp AmpRajeshJosephAbrahamEdasseriathuNo ratings yet
- Newman SurveyDocument91 pagesNewman SurveyRajeshJosephAbrahamEdasseriathuNo ratings yet
- AGC of A Hydrothermal System With Thyristor Controlled Phase Shifter in The Tie-LineDocument7 pagesAGC of A Hydrothermal System With Thyristor Controlled Phase Shifter in The Tie-LineRajeshJosephAbrahamEdasseriathuNo ratings yet
- Load Following in A Bilateral Market With Local ControllersDocument10 pagesLoad Following in A Bilateral Market With Local ControllersRajeshJosephAbrahamEdasseriathuNo ratings yet
- Damping Oscillations in Tie-PowerDocument10 pagesDamping Oscillations in Tie-PowerRajeshJosephAbrahamEdasseriathuNo ratings yet
- Effect of TCPS On Oscillations in Tie-Power and Area Frequencies in An Interconnected Hydrothermal Power SystemDocument8 pagesEffect of TCPS On Oscillations in Tie-Power and Area Frequencies in An Interconnected Hydrothermal Power SystemRajeshJosephAbrahamEdasseriathuNo ratings yet
- Automatic Generation Control of An Interconnected Power System With Capacitive Energy StorageDocument6 pagesAutomatic Generation Control of An Interconnected Power System With Capacitive Energy StorageRajeshJosephAbrahamEdasseriathuNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- BENSON Boilers for Maximum Cost-Effectiveness in Power PlantsDocument20 pagesBENSON Boilers for Maximum Cost-Effectiveness in Power PlantsPrasanna Kumar100% (1)
- Chapter 2 - Analysis of Steam Power Plant Cycle ModDocument79 pagesChapter 2 - Analysis of Steam Power Plant Cycle ModHabtamu Tkubet Ebuy100% (1)
- Study Material NPTI - BoilerDocument37 pagesStudy Material NPTI - BoilerKumar Raj100% (8)
- Chapter 1-4Document58 pagesChapter 1-4Yousef SalahNo ratings yet
- Planning For Desalination ReportDocument54 pagesPlanning For Desalination Reportaagrawal3No ratings yet
- I HRSGDocument7 pagesI HRSGJayanath Nuwan SameeraNo ratings yet
- Second Law-IntroductionDocument10 pagesSecond Law-IntroductionMOHAMMAD SHOHEL RANANo ratings yet
- Tendernotice 1Document774 pagesTendernotice 1Hari Krishna RajuNo ratings yet
- ATD Unit-4 NotesDocument44 pagesATD Unit-4 NotesSanjay KatreddyNo ratings yet
- RoutledgeHandbooks 9781315119717 Sec4 - 14Document23 pagesRoutledgeHandbooks 9781315119717 Sec4 - 14shamssokkaryyNo ratings yet
- 4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFDocument500 pages4th International Conference On Thermal Equipment, Renewable Energy and Rural Development PDFMittapalli SaikiranNo ratings yet
- Boilers and Thermic Fluid HeatersDocument42 pagesBoilers and Thermic Fluid HeatersArvind ShuklaNo ratings yet
- A Report of The Vocational TrainingDocument14 pagesA Report of The Vocational TrainingAvijit palNo ratings yet
- Challenges of Ash Management On Thermal Power PlantsDocument9 pagesChallenges of Ash Management On Thermal Power PlantsVSMS8678No ratings yet
- CPRI ReportDocument104 pagesCPRI ReportPavan KhetrapalNo ratings yet
- Project Exergy Analysis of Steam Power Plant PDFDocument76 pagesProject Exergy Analysis of Steam Power Plant PDFRizqi HanifahNo ratings yet
- Psoc Unit3 4 6 2012Document44 pagesPsoc Unit3 4 6 2012b4buzziNo ratings yet
- Training at Panipat Thermal Power StationDocument16 pagesTraining at Panipat Thermal Power Station9959513184No ratings yet
- New Energy Technologies Issue 14Document160 pagesNew Energy Technologies Issue 14blameitontherain9877100% (1)
- 1) Introduction, Merits and Demerits of DPP, Selection Site of DPP, Working of DPP? Ans)Document6 pages1) Introduction, Merits and Demerits of DPP, Selection Site of DPP, Working of DPP? Ans)ROY kNo ratings yet
- EEE Notes Unit 3 Conventional Energy Resources PDFDocument8 pagesEEE Notes Unit 3 Conventional Energy Resources PDFAyush NandurkarNo ratings yet
- Turbine ParametersDocument95 pagesTurbine ParametersRajashekarBheemaNo ratings yet
- Element Pipe 5Document11 pagesElement Pipe 5Akie MontepiaNo ratings yet
- Tangential FiringDocument8 pagesTangential FiringHeather PerezNo ratings yet
- Chapter Three: Economic DispatchDocument15 pagesChapter Three: Economic Dispatchsagar0% (1)
- Steam Turbine Condenser: A.k.s.raghavaDocument72 pagesSteam Turbine Condenser: A.k.s.raghavaRachit KhannaNo ratings yet
- Arif Abdul Rohman Mechanical Engineer ResumeDocument2 pagesArif Abdul Rohman Mechanical Engineer Resumeelang gunawanNo ratings yet
- Analysis and Evaluation of Heat Pump Efficiency in Real-Life ConditionsDocument44 pagesAnalysis and Evaluation of Heat Pump Efficiency in Real-Life ConditionsNADYANo ratings yet
- Gazette Notice - Shedule of Tarrifs For The Supply of Electrical Energy by KPLC PDFDocument7 pagesGazette Notice - Shedule of Tarrifs For The Supply of Electrical Energy by KPLC PDFgeraldmrkNo ratings yet
- Tutorial Thermal Power PlantDocument2 pagesTutorial Thermal Power PlantDhananjay KatkarNo ratings yet