You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 12-Pose Sun Salutation for Health and FitnessDocument7 pages12-Pose Sun Salutation for Health and FitnessyogiiinNo ratings yet
- Minimum Key Figures - SAP IBPDocument14 pagesMinimum Key Figures - SAP IBPharry4sapNo ratings yet
- Washroom Sections & DetailsDocument5 pagesWashroom Sections & DetailsyogiiinNo ratings yet
- Pci Manual For The Design Hollow Core SlabsDocument141 pagesPci Manual For The Design Hollow Core Slabsmedodo100% (4)
- Optimization in Engineering Models and AlgorithmsDocument422 pagesOptimization in Engineering Models and AlgorithmsAlexander Fierro100% (3)
- Transportation and Assignment ModelsDocument66 pagesTransportation and Assignment ModelsMeari IsutaNo ratings yet
- Deep Learning For Computer Vision - Rajalingappa ShanmugamaniDocument427 pagesDeep Learning For Computer Vision - Rajalingappa ShanmugamaniTin Kuculo93% (14)
- Seismic Design of Liquid Storage TanksDocument112 pagesSeismic Design of Liquid Storage TanksMunna Bhai100% (1)
- (Systems and Industrial Engineering Series) Davim, J. Paulo - Kumar, Kaushik - Optimization For Engineering Problems-Wiley (2019)Document193 pages(Systems and Industrial Engineering Series) Davim, J. Paulo - Kumar, Kaushik - Optimization For Engineering Problems-Wiley (2019)Muhammad NaeemNo ratings yet
- Cyberia Trader EADocument8 pagesCyberia Trader EAMj ArNo ratings yet
- Problem Set E: Attempt HistoryDocument17 pagesProblem Set E: Attempt HistoryHenryNo ratings yet
- Five Dysfunctions of A TeamDocument3 pagesFive Dysfunctions of A TeamyogiiinNo ratings yet
- Managerial AccountingDocument15 pagesManagerial AccountingDedar Hossain83% (6)
- StringersDocument1 pageStringersyogiiinNo ratings yet
- FCD Fy 220 Steel Pipe CapacityDocument2 pagesFCD Fy 220 Steel Pipe CapacityyogiiinNo ratings yet
- Venkatesh Park CHS LTD, Sutarwadi, Pashan, Pune, Maharashtra. - (Resident Information Form)Document1 pageVenkatesh Park CHS LTD, Sutarwadi, Pashan, Pune, Maharashtra. - (Resident Information Form)yogiiinNo ratings yet
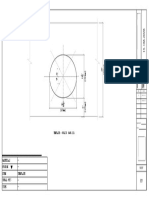
- Sample Countertop Cut Tickets P0Document1 pageSample Countertop Cut Tickets P0yogiiinNo ratings yet
- Illini DT Strand PatternDocument1 pageIllini DT Strand PatternyogiiinNo ratings yet
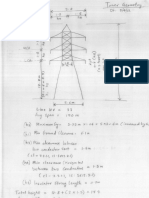
- 33kv Tower GeometryDocument1 page33kv Tower GeometryyogiiinNo ratings yet
- Example of Results PDFDocument5 pagesExample of Results PDFyogiiinNo ratings yet
- FCD 1Document4 pagesFCD 1yogiiinNo ratings yet
- Beam End Forces Support ReactionDocument2 pagesBeam End Forces Support ReactionyogiiinNo ratings yet
- Typical Septic Tank DetailDocument1 pageTypical Septic Tank DetailyogiiinNo ratings yet
- Officejet 7500ADocument2 pagesOfficejet 7500AyogiiinNo ratings yet
- PSC Loading FaceDocument1 pagePSC Loading FaceyogiiinNo ratings yet
- Comparison of Russian and Nigerian Wind Load Codes for Tall BuildingsDocument6 pagesComparison of Russian and Nigerian Wind Load Codes for Tall BuildingsAJBAJBNo ratings yet
- Final Exam Key 08Document7 pagesFinal Exam Key 08Barun Kumar SinghNo ratings yet
- Optimal Placement and Sizing of Wind Farm in Vietnamese Power System Based On Particle Swarm OptimizationDocument6 pagesOptimal Placement and Sizing of Wind Farm in Vietnamese Power System Based On Particle Swarm Optimizationnam321985No ratings yet
- Update Sept 08Document26 pagesUpdate Sept 08api-27370939No ratings yet
- TE Syllabus Mech PDFDocument40 pagesTE Syllabus Mech PDFSanket JadhavNo ratings yet
- 33 Location Optimization of Urban Fire Stations Access and Service CoverageDocument9 pages33 Location Optimization of Urban Fire Stations Access and Service Coverageedy gunawanNo ratings yet
- Intro to Mgmt Science Ch 1Document9 pagesIntro to Mgmt Science Ch 1Zein GonzalezNo ratings yet
- What Is Operations Resarch HandoutsDocument9 pagesWhat Is Operations Resarch HandoutsMuhammadUsmanSaeedNo ratings yet
- Designing Complex Steel Canopies Using Digital Tools and SimulationDocument18 pagesDesigning Complex Steel Canopies Using Digital Tools and SimulationDrGanesh KameNo ratings yet
- Applied Mathematical Model For Construction PlanniDocument11 pagesApplied Mathematical Model For Construction Plannianoop.sivan303No ratings yet
- Chapter-4 AP - FormattedDocument25 pagesChapter-4 AP - FormattedMaxy GiuliNo ratings yet
- Design of Optimal Water Distribution Systems: Ioan SarbuDocument9 pagesDesign of Optimal Water Distribution Systems: Ioan SarbujhdmssNo ratings yet
- Optimal Control Minimum Time HamiltonianDocument11 pagesOptimal Control Minimum Time Hamiltoniandarin koblickNo ratings yet
- OPERATION RESEARCH Unit 1Document13 pagesOPERATION RESEARCH Unit 1Arif QuadriNo ratings yet
- Directory of Experts UKZN - SC EPPEIDocument3 pagesDirectory of Experts UKZN - SC EPPEIIfedayo OladejiNo ratings yet
- Hydro Thermal Economic Dispatch With Renewable EnergyDocument75 pagesHydro Thermal Economic Dispatch With Renewable EnergyMohandRahimNo ratings yet
- Cuckoo Search (CS) Algorithm - Matlab CodeDocument4 pagesCuckoo Search (CS) Algorithm - Matlab CodeGogyNo ratings yet
- Edge Computing: A Survey Review of Developments, Applications and ChallengesDocument40 pagesEdge Computing: A Survey Review of Developments, Applications and ChallengesabhayNo ratings yet
- Linear ProgrammingDocument12 pagesLinear ProgrammingMark WatneyNo ratings yet
- Lec41 (Constrained Optimization)Document12 pagesLec41 (Constrained Optimization)John PintoNo ratings yet
- Levenberg-Marquardt method for nonlinear curve fittingDocument18 pagesLevenberg-Marquardt method for nonlinear curve fittingLeonora C. FordNo ratings yet
- Performance Benefits in Passive Vehicle Suspensions Employing InertersDocument6 pagesPerformance Benefits in Passive Vehicle Suspensions Employing Inertersนิติพล ไชยวงศ์No ratings yet
- Topology Optimization of An Additive Layer Manufactured Aerospace PartDocument9 pagesTopology Optimization of An Additive Layer Manufactured Aerospace PartAltairEnlightenNo ratings yet