You might also like
- An Agent Based Model To Improve Traffic Flow and Assess The Impact of Smart Traffic LightDocument11 pagesAn Agent Based Model To Improve Traffic Flow and Assess The Impact of Smart Traffic LightIJAR JOURNALNo ratings yet
- 1 s2.0 S0952197614000086 MainDocument15 pages1 s2.0 S0952197614000086 Maing1305626957No ratings yet
- Research Article: Estimating The Potential Modal Split of Any Future Mode Using Revealed Preference DataDocument11 pagesResearch Article: Estimating The Potential Modal Split of Any Future Mode Using Revealed Preference DataAmul ShresthaNo ratings yet
- Modelling, Simulation Methods For Intelligent Transportation SystemsDocument23 pagesModelling, Simulation Methods For Intelligent Transportation SystemsSam N SamNo ratings yet
- Persuasive Technologies For Sustainable Urban MobilityDocument11 pagesPersuasive Technologies For Sustainable Urban MobilityDaniel Casquero SolerNo ratings yet
- Simulation of Intelligent Traffic Control For Autonomous VehiclesDocument7 pagesSimulation of Intelligent Traffic Control For Autonomous Vehiclessivaharish.sc.2017.mechNo ratings yet
- 0.1 Multiple Equilibrium Behaviors Considering Human Exposure ToDocument11 pages0.1 Multiple Equilibrium Behaviors Considering Human Exposure ToXia YangNo ratings yet
- Sustainable City Plan Based On Planning Algorithm 2011 Procedia Social AnDocument9 pagesSustainable City Plan Based On Planning Algorithm 2011 Procedia Social AnPaola Giraldo MontoyaNo ratings yet
- Socially Aware Motion Planning With Deep Reinforcement LearningDocument8 pagesSocially Aware Motion Planning With Deep Reinforcement LearningSushant SNo ratings yet
- Dynamic Traffic Light Control System Based On Process Synchronization Among Connected VehiclesDocument11 pagesDynamic Traffic Light Control System Based On Process Synchronization Among Connected VehiclesJulina Jerez AbadiesNo ratings yet
- Optimal Approach Layout READDocument6 pagesOptimal Approach Layout READZaid Mohammad AlRababahNo ratings yet
- Multi-Criteria Optimization of Public Transport On DemandDocument10 pagesMulti-Criteria Optimization of Public Transport On DemandIJAR JOURNALNo ratings yet
- A Review On The Applications of Petri Nets in Modeling Analysis and Control of Urban TrafficDocument13 pagesA Review On The Applications of Petri Nets in Modeling Analysis and Control of Urban Trafficchongqi heNo ratings yet
- Extracting Microscopic Pedestrian CharacteristicsDocument15 pagesExtracting Microscopic Pedestrian CharacteristicsMd.Reza-E- RabbiNo ratings yet
- Agent-Based Modeling For Predicting Pedestrian Trajectories Around An Autonomous Vehicle PDFDocument50 pagesAgent-Based Modeling For Predicting Pedestrian Trajectories Around An Autonomous Vehicle PDFChongfeng WeiNo ratings yet
- JG Math ModelingggDocument17 pagesJG Math Modelingggjohngil867No ratings yet
- Mobility Multicast Tech04Document13 pagesMobility Multicast Tech04nandiniangadi92_9120No ratings yet
- ITS and Traffic Management: M. PapageorgiouDocument60 pagesITS and Traffic Management: M. PapageorgiouShubham ShekharNo ratings yet
- 1 s2.0 S0378437117313523 MainDocument21 pages1 s2.0 S0378437117313523 MainParsa AstaneNo ratings yet
- Transport Policy: David Rey, Vinayak V. Dixit, Jean-Luc Ygnace, S. Travis WallerDocument10 pagesTransport Policy: David Rey, Vinayak V. Dixit, Jean-Luc Ygnace, S. Travis WallerSayani MandalNo ratings yet
- Chapter 4Document10 pagesChapter 4Reeya AgrawalNo ratings yet
- Fuzzy Traffic Light Control Using Cellular Automata For Urban TrafficDocument8 pagesFuzzy Traffic Light Control Using Cellular Automata For Urban TrafficUsman TariqNo ratings yet
- Analyzing On-Demand Mobility Services by Agent-Based SimulationDocument10 pagesAnalyzing On-Demand Mobility Services by Agent-Based SimulationJohan AmayaNo ratings yet
- Kostic 2021Document23 pagesKostic 2021RaghavendraSNo ratings yet
- Large-Scale Agent-Based Traffic Micro-Simulation ExperiencesDocument6 pagesLarge-Scale Agent-Based Traffic Micro-Simulation ExperiencesMubashir SheheryarNo ratings yet
- ITS 2022 A Review On Intention Aware and Interaction Aware Trajectory Prediction For Autonomous VehiclesDocument21 pagesITS 2022 A Review On Intention Aware and Interaction Aware Trajectory Prediction For Autonomous VehiclesSoulayma GazzehNo ratings yet
- Zhao 2014Document21 pagesZhao 2014Michael Quispe BasilioNo ratings yet
- Asu Transportation Engineering Seminar 04 06 2015Document1 pageAsu Transportation Engineering Seminar 04 06 2015api-251240530No ratings yet
- The Impact of Real Time Information On TransportDocument6 pagesThe Impact of Real Time Information On Transportmaría esterNo ratings yet
- Hoogendoorn, S., Hoogendoorn, R., Wang, M., & Daamen, W. (2012)Document11 pagesHoogendoorn, S., Hoogendoorn, R., Wang, M., & Daamen, W. (2012)ap741987753No ratings yet
- Cheng2012 - ReadDocument17 pagesCheng2012 - ReadGaluh PashaNo ratings yet
- SumoDocument18 pagesSumoahmetahmetNo ratings yet
- Transportation ModelsDocument65 pagesTransportation ModelsAnas R. Abu KashefNo ratings yet
- 1 s2.0 S1877042812043017 Main - 7Document10 pages1 s2.0 S1877042812043017 Main - 7Syed Moosa RazaNo ratings yet
- Literature Review On Traffic FlowDocument6 pagesLiterature Review On Traffic Flowgpnovecnd100% (1)
- Improving The Performance of Single-Intersection Urban Traffic Networks Based On A Model Predictive ControllerDocument16 pagesImproving The Performance of Single-Intersection Urban Traffic Networks Based On A Model Predictive ControllerRamprasath JayabalanNo ratings yet
- Evaluation of in Vehicle Decision Support System For Emergency EvacuationDocument11 pagesEvaluation of in Vehicle Decision Support System For Emergency EvacuationSarraSarouraNo ratings yet
- A Deep Reingorcement Learning Approach For Traffic Signal Control OptimizationDocument21 pagesA Deep Reingorcement Learning Approach For Traffic Signal Control OptimizationHossam Antar KorinNo ratings yet
- E GuideDocument29 pagesE GuideAishah RashedNo ratings yet
- Proximal Policy Optimization Through A Deep ReinfoDocument19 pagesProximal Policy Optimization Through A Deep ReinfoRed AlexNo ratings yet
- Predicting Travel Mode of Individuals by Machine Learning: SciencedirectDocument10 pagesPredicting Travel Mode of Individuals by Machine Learning: Sciencedirectrana__singhNo ratings yet
- Traffic Lights Management Using Optimization ToolDocument8 pagesTraffic Lights Management Using Optimization Toolalisha shahidNo ratings yet
- Automated Transport SystemsDocument3 pagesAutomated Transport SystemsPedro José SuárezNo ratings yet
- Ports PrelimsDocument7 pagesPorts PrelimsJericho SulaNo ratings yet
- Paper Colregs CameraDocument7 pagesPaper Colregs CameraJuan Santiago Latigo ColliNo ratings yet
- Synopsis of The Proposed Research Work Submitted To Magadh UniversityDocument9 pagesSynopsis of The Proposed Research Work Submitted To Magadh UniversityDeepak MitraNo ratings yet
- E1A119089 - Wa Ode Ainun JariahDocument155 pagesE1A119089 - Wa Ode Ainun JariahFinasiruaNo ratings yet
- Human Behavioral Models Using Utility Theory and Prospect TheoryDocument26 pagesHuman Behavioral Models Using Utility Theory and Prospect TheorydescobrirNo ratings yet
- Car Following Model ReportDocument27 pagesCar Following Model ReportSaleh Ragab100% (1)
- REGRAGUI2022Document33 pagesREGRAGUI2022Hajaros RegraguiNo ratings yet
- Traffic Simulation ModelingDocument3 pagesTraffic Simulation ModelingAyesha awanNo ratings yet
- 1438 006 KhistyDocument6 pages1438 006 Khistyznour alyNo ratings yet
- Use of Deep Learning To Study Modelling Deterioration of Pavements A Case Study in IowaDocument32 pagesUse of Deep Learning To Study Modelling Deterioration of Pavements A Case Study in IowaRamy HusseinNo ratings yet
- Rebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachDocument7 pagesRebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachSayani MandalNo ratings yet
- 10.1007@978 981 15 0644 4Document9 pages10.1007@978 981 15 0644 4Amul ShresthaNo ratings yet
- Lane Changing Behavior On Urban Streets A Focus Group Based StudyDocument10 pagesLane Changing Behavior On Urban Streets A Focus Group Based StudyKathlyn Alan NaragNo ratings yet
- Traffic Analysis TechniquesDocument5 pagesTraffic Analysis TechniquesPete BasNo ratings yet
- Pedestrian Management Strategies For Improving Flow Dynamics in Transportation Hubs REVISEDocument22 pagesPedestrian Management Strategies For Improving Flow Dynamics in Transportation Hubs REVISEZaid Mohammad AlRababahNo ratings yet
- Trading Project Costs and Benefits in Multi-Attribute Tradespace ExplorationDocument16 pagesTrading Project Costs and Benefits in Multi-Attribute Tradespace Explorationjoojoo987654321No ratings yet
- Edu Exam P Sample SolDocument92 pagesEdu Exam P Sample SolMarhadi LeonchiNo ratings yet
- Jadwal Ppssa 2015Document2 pagesJadwal Ppssa 2015Marhadi LeonchiNo ratings yet
- Exam-Style Questions For CAS Exam 7 - G. Stolyarov IIDocument11 pagesExam-Style Questions For CAS Exam 7 - G. Stolyarov IIMarhadi LeonchiNo ratings yet
- Descriptive Statistics FaktorDocument5 pagesDescriptive Statistics FaktorMarhadi LeonchiNo ratings yet
- Chapter 9Document14 pagesChapter 9Marhadi LeonchiNo ratings yet
- 2005RMSWebDesign GlossaryofActuarialTermsDocument8 pages2005RMSWebDesign GlossaryofActuarialTermsMarhadi LeonchiNo ratings yet
- Agreement 123Document1 pageAgreement 123Marhadi LeonchiNo ratings yet
- Akmss Shoprite ReportDocument10 pagesAkmss Shoprite ReportMarhadi Leonchi0% (1)
- Microsoft Data BaseDocument27 pagesMicrosoft Data BaseMarhadi LeonchiNo ratings yet
- DT ReliabilitasDocument5 pagesDT ReliabilitasMarhadi LeonchiNo ratings yet
- Easy Free in Come InternationalDocument25 pagesEasy Free in Come InternationalMarhadi LeonchiNo ratings yet
- Correlations OutputDocument5 pagesCorrelations OutputMarhadi LeonchiNo ratings yet
- Uniting A CityDocument21 pagesUniting A CityMarhadi LeonchiNo ratings yet
- I09ehe PDFDocument91 pagesI09ehe PDFMarhadi LeonchiNo ratings yet
- BK Facresguide PDFDocument136 pagesBK Facresguide PDFMarhadi LeonchiNo ratings yet
- I-405 MIS Final Report PDFDocument95 pagesI-405 MIS Final Report PDFMarhadi LeonchiNo ratings yet
- Duivenvoorden 2012 PDFDocument7 pagesDuivenvoorden 2012 PDFMarhadi LeonchiNo ratings yet
- Baja, ES Schwartz, JD Coull, BA Wellenius, GA Vokonas, PS Suh, HHDocument1 pageBaja, ES Schwartz, JD Coull, BA Wellenius, GA Vokonas, PS Suh, HHMarhadi LeonchiNo ratings yet
- Data Uji Validitas Variabel XDocument3 pagesData Uji Validitas Variabel XMarhadi LeonchiNo ratings yet
- Ebook Succession Planning PDFDocument31 pagesEbook Succession Planning PDFMarhadi LeonchiNo ratings yet
- 1 s2.0 S1877042812043133 Main PDFDocument8 pages1 s2.0 S1877042812043133 Main PDFMarhadi LeonchiNo ratings yet
- Apx - 4 - 3i - Travel - Built - Environment Cetak Referensi PDFDocument41 pagesApx - 4 - 3i - Travel - Built - Environment Cetak Referensi PDFMarhadi LeonchiNo ratings yet
- Hasil Output DeskriptifDocument20 pagesHasil Output DeskriptifMarhadi LeonchiNo ratings yet
- Tabel FrekuensiDocument10 pagesTabel FrekuensiMarhadi LeonchiNo ratings yet
- DissertationDocument125 pagesDissertationMarhadi LeonchiNo ratings yet
- Sap Teknik Samplign UiDocument6 pagesSap Teknik Samplign UiMarhadi LeonchiNo ratings yet
- Descriptive Statistics FaktorDocument5 pagesDescriptive Statistics FaktorMarhadi LeonchiNo ratings yet
- Data Uji Validitas Variabel XDocument3 pagesData Uji Validitas Variabel XMarhadi LeonchiNo ratings yet
- Distribusi NormalDocument32 pagesDistribusi NormalMarhadi LeonchiNo ratings yet
- Strategic Management SlidesDocument150 pagesStrategic Management SlidesIqra BilalNo ratings yet
- Data SheetDocument56 pagesData SheetfaycelNo ratings yet
- Bridge Over BrahmaputraDocument38 pagesBridge Over BrahmaputraRahul DevNo ratings yet
- Darkle Slideshow by SlidesgoDocument53 pagesDarkle Slideshow by SlidesgoADITI GUPTANo ratings yet
- ISO Position ToleranceDocument15 pagesISO Position ToleranceНиколай КалугинNo ratings yet
- Class 12 Physics Derivations Shobhit NirwanDocument6 pagesClass 12 Physics Derivations Shobhit Nirwanaastha.sawlaniNo ratings yet
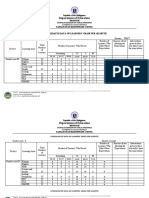
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNo ratings yet
- Point and Figure ChartsDocument5 pagesPoint and Figure ChartsShakti ShivaNo ratings yet
- AYUMJADocument1 pageAYUMJASoumet Das SoumetNo ratings yet
- Ficha Técnica Panel Solar 590W LuxenDocument2 pagesFicha Técnica Panel Solar 590W LuxenyolmarcfNo ratings yet
- Pam8610 PDFDocument15 pagesPam8610 PDFRaka Satria PradanaNo ratings yet
- Control ValvesDocument95 pagesControl ValvesHardik Acharya100% (1)
- Audi A4-7Document532 pagesAudi A4-7Anonymous QRVqOsa5No ratings yet
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDocument2 pagesDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonNo ratings yet
- Designed For Severe ServiceDocument28 pagesDesigned For Severe ServiceAnthonyNo ratings yet
- Project Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesDocument12 pagesProject Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesLeann WeaverNo ratings yet
- Maximum and Minimum PDFDocument3 pagesMaximum and Minimum PDFChai Usajai UsajaiNo ratings yet
- Cap1 - Engineering in TimeDocument12 pagesCap1 - Engineering in TimeHair Lopez100% (1)
- Governance Operating Model: Structure Oversight Responsibilities Talent and Culture Infrastructu REDocument6 pagesGovernance Operating Model: Structure Oversight Responsibilities Talent and Culture Infrastructu REBob SolísNo ratings yet
- Civil Rights Vocabulary Lesson PlanDocument4 pagesCivil Rights Vocabulary Lesson PlanKati ArmstrongNo ratings yet
- Waste Biorefinery Models Towards Sustainable Circular Bioeconomy Critical Review and Future Perspectives2016bioresource Technology PDFDocument11 pagesWaste Biorefinery Models Towards Sustainable Circular Bioeconomy Critical Review and Future Perspectives2016bioresource Technology PDFdatinov100% (1)
- Sprinkler Sizing en v1Document12 pagesSprinkler Sizing en v1CristianDumitru0% (1)
- KIA SONET BookingDocketDocument7 pagesKIA SONET BookingDocketRajesh ThulasiramNo ratings yet
- Engineering Management: Class RequirementsDocument30 pagesEngineering Management: Class RequirementsMigaeaNo ratings yet
- File RecordsDocument161 pagesFile RecordsAtharva Thite100% (2)
- Code of Ethics For Civil Engineers PiceDocument3 pagesCode of Ethics For Civil Engineers PiceEdwin Ramos Policarpio100% (3)
- Clustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaDocument18 pagesClustering Menggunakan Metode K-Means Untuk Menentukan Status Gizi BalitaAji LaksonoNo ratings yet
- End-Of-Chapter Answers Chapter 7 PDFDocument12 pagesEnd-Of-Chapter Answers Chapter 7 PDFSiphoNo ratings yet
- PDS DeltaV SimulateDocument9 pagesPDS DeltaV SimulateJesus JuarezNo ratings yet
- Electronic Diversity Visa ProgrambDocument1 pageElectronic Diversity Visa Programbsamkimari5No ratings yet