You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Finalexam 5e PracticeDocument21 pagesFinalexam 5e Practiceodette_7thNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Polynomials VideosDocument14 pagesPolynomials VideosThat One Lazy CatNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 978-0!00!820587-4 Edexcel International GCSE Maths Second Edition - Student BookDocument18 pages978-0!00!820587-4 Edexcel International GCSE Maths Second Edition - Student Booktella idrisNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Practice Questions: Class Ix: Chapter - 2 PolynomialsDocument3 pagesPractice Questions: Class Ix: Chapter - 2 Polynomialsramyaanand73No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Second Order Differential Equations - Dynamics - 2020Document13 pagesSecond Order Differential Equations - Dynamics - 2020rory mcelhinneyNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Lecture Week 13a (Supplementary) : - Constrained OptimisationDocument27 pagesLecture Week 13a (Supplementary) : - Constrained OptimisationdanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Diophantine Equations HandoutDocument2 pagesDiophantine Equations Handoutdb7894No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 5ACh12 (Coordinate Treatment of Simple Locus Problems)Document45 pages5ACh12 (Coordinate Treatment of Simple Locus Problems)api-19856023No ratings yet
- 1 s2.0 S1574013721000186 MainDocument13 pages1 s2.0 S1574013721000186 MainThanmai MuvvaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Giancoli - Physics Principles Appendix-2Document1 pageGiancoli - Physics Principles Appendix-2Aman KeltaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Jee Maths Binomial Theorem TestDocument5 pagesJee Maths Binomial Theorem Testmonikamonika74201No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Jasrae Issue 4 Vol 16 89154Document10 pagesJasrae Issue 4 Vol 16 89154Sanju AdiNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Vector Calculus, Linear Algebra, and Differential Forms: A Unified ApproachDocument4 pagesVector Calculus, Linear Algebra, and Differential Forms: A Unified ApproachDhrubajyoti DasNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Matrix - Algebra ReviewDocument25 pagesMatrix - Algebra Reviewandres felipe otero rojasNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Partial DerivativesDocument15 pagesPartial DerivativesAien Nurul AinNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- MatlabDocument50 pagesMatlabOleg ZenderNo ratings yet
- MathematicsDocument55 pagesMathematicsBrian kNo ratings yet
- WINSEM2019-20 STS5102 SS VL2019205000260 Reference Material I 18-Feb-2020 LogarithmsDocument21 pagesWINSEM2019-20 STS5102 SS VL2019205000260 Reference Material I 18-Feb-2020 LogarithmsDipali AttardeNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- P6.1 VectorsDocument29 pagesP6.1 Vectorstravisclark123123No ratings yet
- 3 - Examples of Irrational NumbersDocument12 pages3 - Examples of Irrational Numberssap6370No ratings yet
- CSE 2201 Algorthm Analysis & Design: Solving RecurrenceDocument22 pagesCSE 2201 Algorthm Analysis & Design: Solving RecurrenceRomNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- CBSE Class 6 Algebra WorksheetDocument1 pageCBSE Class 6 Algebra WorksheetAnsuman Mahanty100% (5)
- Cad Cam 30 - 03 - 2021Document14 pagesCad Cam 30 - 03 - 2021Bharat GavaliNo ratings yet
- Econometrics2006 PDFDocument196 pagesEconometrics2006 PDFAmz 1No ratings yet
- Homework 7 Solutions: 1 Chapter 9, Problem 10 (Graded)Document14 pagesHomework 7 Solutions: 1 Chapter 9, Problem 10 (Graded)muhammad1zeeshan1sarNo ratings yet
- VectorsDocument55 pagesVectorsGeofrey KanenoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- VECTORDocument38 pagesVECTORnithin_v90No ratings yet
- Exactness, Tor and Flat Modules Over A Commutative RingDocument8 pagesExactness, Tor and Flat Modules Over A Commutative RingAlbertoAlcaláNo ratings yet
- 10 Maths. 1 Mark. EM. BookbackDocument13 pages10 Maths. 1 Mark. EM. BookbackKrish KrishnNo ratings yet
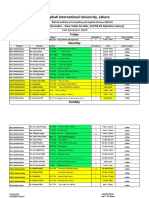
- Riphah International University, Lahore: Deparetment of Mathematics - Time Table For MSC, M.Phil, PH.D (Online Classes)Document2 pagesRiphah International University, Lahore: Deparetment of Mathematics - Time Table For MSC, M.Phil, PH.D (Online Classes)Anam BilqeesNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)