You might also like
- Industrial Waste Neutralization and Equalization BasicsDocument16 pagesIndustrial Waste Neutralization and Equalization BasicsaliNo ratings yet
- Lab ReportDocument17 pagesLab ReportTemitope AmaoNo ratings yet
- 45 Expt. No. 5 Plate and Frame Filter PressDocument5 pages45 Expt. No. 5 Plate and Frame Filter PressnadyahginiceNo ratings yet
- 3 ElementDocument8 pages3 ElementHimanshu SharmaNo ratings yet
- A Minor Project ReportDocument36 pagesA Minor Project ReportPriyanka JainNo ratings yet
- Residence Time of Products in Holding Tubes of High-Temperature Short-Time PasteurizersDocument6 pagesResidence Time of Products in Holding Tubes of High-Temperature Short-Time PasteurizersRex Chem0% (1)
- Fluid Mechanics Lab Report 1 AliDocument10 pagesFluid Mechanics Lab Report 1 AliAli ArshadNo ratings yet
- Description, Working and Maintenance of Can Washers Straight - Through Can WasherDocument8 pagesDescription, Working and Maintenance of Can Washers Straight - Through Can WasherMonty KushwahaNo ratings yet
- CSTRsDocument10 pagesCSTRsAchini NawarathnaNo ratings yet
- BIPI Test Somaruga, Gazzera, WouterloodDocument13 pagesBIPI Test Somaruga, Gazzera, WouterloodcarlossomarugaNo ratings yet
- Mixing Nozzles For Brewery TanksDocument8 pagesMixing Nozzles For Brewery TanksVikk SuriyaNo ratings yet
- Filtration and water reuse in fish farmingDocument39 pagesFiltration and water reuse in fish farmingJosé Antonio Retamal TosoNo ratings yet
- Boiler Feed Water System 24Document3 pagesBoiler Feed Water System 24clintonNo ratings yet
- Evaluating Flow of Bitumen EmulsionsDocument14 pagesEvaluating Flow of Bitumen EmulsionsArian VelayatiNo ratings yet
- Experiment 7 - Performance Characteristics of Centrifugal PumpDocument7 pagesExperiment 7 - Performance Characteristics of Centrifugal PumpCassandra JienahNo ratings yet
- Stirred Tank Reactor Series Experiment ReportDocument20 pagesStirred Tank Reactor Series Experiment ReportEmonbeifo EfosasereNo ratings yet
- Stirred Tank in Series ReportDocument20 pagesStirred Tank in Series ReportEmonbeifo EfosasereNo ratings yet
- Notes - RP 03 Osmosis - AQA Biology GCSEDocument3 pagesNotes - RP 03 Osmosis - AQA Biology GCSEtobilobagee69No ratings yet
- Facultad de Ingeniería Mecánica, Electrónica Y Biomédica: Taller 2Document2 pagesFacultad de Ingeniería Mecánica, Electrónica Y Biomédica: Taller 2hernan gonzalezNo ratings yet
- LAB4 (Procedure, Theory, Appendix)Document9 pagesLAB4 (Procedure, Theory, Appendix)Luqman HakimNo ratings yet
- MF Lab2Document13 pagesMF Lab2RafiHunJian100% (1)
- Some Practical Aspects of Sugar Fermentation by Baker's Yeast (Saccharomyces Cerevisiae)Document9 pagesSome Practical Aspects of Sugar Fermentation by Baker's Yeast (Saccharomyces Cerevisiae)James BelciñaNo ratings yet
- Research PaperDocument7 pagesResearch PaperRayanna WardNo ratings yet
- Calibrating a Water Tank & MeterDocument23 pagesCalibrating a Water Tank & MeterJeremias John KarloNo ratings yet
- Desalination in Oman and The Fundamentals of Reverse Osmosis DesignDocument14 pagesDesalination in Oman and The Fundamentals of Reverse Osmosis DesignNguyen Van DzungNo ratings yet
- Introduction To Process Control 2nd Romagnoli Solution ManualDocument38 pagesIntroduction To Process Control 2nd Romagnoli Solution Manualcribberental9pj0q100% (10)
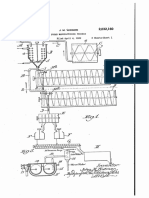
- J. M. Widmer: Filed April 4, 19.52Document8 pagesJ. M. Widmer: Filed April 4, 19.52Kah MunNo ratings yet
- C.I.P. CleaningDocument4 pagesC.I.P. CleaningAnh CottoncandyNo ratings yet
- AGITATION AND MIXING PROCESS OF LIQUID DETERGENTDocument12 pagesAGITATION AND MIXING PROCESS OF LIQUID DETERGENTDhiyyah Mardhiyyah100% (1)
- INDITEX FS PRET 002 Ecualization HomogenizationDocument16 pagesINDITEX FS PRET 002 Ecualization HomogenizationgiyagirlsNo ratings yet
- Application of Process Intensification in Food Processing IndustriesDocument41 pagesApplication of Process Intensification in Food Processing IndustriesTran Vi NhaNo ratings yet
- Leone2015 Centifuga HorizontalDocument47 pagesLeone2015 Centifuga HorizontalEFRAINNo ratings yet
- PATENT LAWDocument21 pagesPATENT LAWshaurya raiNo ratings yet
- 03Document9 pages03fghfghrfjNo ratings yet
- Funnel Viscosity Lab.2Document11 pagesFunnel Viscosity Lab.2Lulav BarwaryNo ratings yet
- Coagulation and Flocculation-1Document30 pagesCoagulation and Flocculation-1Jomer Levi PortuguezNo ratings yet
- FFG - 2003 - Formation - S. L. AnnaDocument3 pagesFFG - 2003 - Formation - S. L. AnnaHarpreet MatharooNo ratings yet
- 2003 Pa m29Document11 pages2003 Pa m29rudiskw456No ratings yet
- Control System Design Enhances Sorghum Beer Brewing ProcessDocument8 pagesControl System Design Enhances Sorghum Beer Brewing Processpana0048No ratings yet
- Masinde Muliro University of Science and TechnologyDocument51 pagesMasinde Muliro University of Science and TechnologyKelvho GitongaNo ratings yet
- OPTIMIZING SOUR WATER STRIPPER FEED PREHEATINGDocument6 pagesOPTIMIZING SOUR WATER STRIPPER FEED PREHEATINGDaniel Gonzalez RodriguezNo ratings yet
- Effects of Vessel Geometry Fermenting Volume and YDocument4 pagesEffects of Vessel Geometry Fermenting Volume and Yمیلاد قاسمیNo ratings yet
- Brown Stock WashingDocument5 pagesBrown Stock WashingDaniel LieNo ratings yet
- Development and Performance Evalution of A Recirculatory System Fish IncubatorDocument6 pagesDevelopment and Performance Evalution of A Recirculatory System Fish IncubatorInternational Journal of computational Engineering research (IJCER)No ratings yet
- Low Turbulence ClarifiersDocument11 pagesLow Turbulence ClarifiersBenjamin Gómez CabanillasNo ratings yet
- Liquid Filling Production Line (Project)Document17 pagesLiquid Filling Production Line (Project)Mahmoud KassabNo ratings yet
- Desalination Design Fundamentals in OmanDocument16 pagesDesalination Design Fundamentals in OmanJayfeson Gotuanco100% (2)
- Continuous Fermentation Process For Producing Ethanol: ZusammenfassungDocument7 pagesContinuous Fermentation Process For Producing Ethanol: ZusammenfassungBrebeanu AndreiNo ratings yet
- Tesis de Grado: Escuela Superior Politécnica de Chimborazo Facultad de Mecánica Escuela de Ingeniería MecánicaDocument35 pagesTesis de Grado: Escuela Superior Politécnica de Chimborazo Facultad de Mecánica Escuela de Ingeniería Mecánicaraul rocha mejiaNo ratings yet
- Conventional Flow-Through SystemsDocument10 pagesConventional Flow-Through Systemshanifazhar1811No ratings yet
- SPE 152975 Using Dynamic Simulations To Optimize The Start-Up Procedure of A Lazy Horizontal Oil WellDocument11 pagesSPE 152975 Using Dynamic Simulations To Optimize The Start-Up Procedure of A Lazy Horizontal Oil Wellmatheus_moreira0990No ratings yet
- Physical Chem 1 (Combined)Document35 pagesPhysical Chem 1 (Combined)Yit JuanNo ratings yet
- Review of Circular Tank Technology and ManagementDocument19 pagesReview of Circular Tank Technology and ManagementgarycwkNo ratings yet
- Fssai-Manual Fruits Veg 25-05-2016Document60 pagesFssai-Manual Fruits Veg 25-05-2016Marcia NegroniNo ratings yet
- SLE Experiment (REPORT)Document8 pagesSLE Experiment (REPORT)Kuknesvary PuniamurthyNo ratings yet
- Edutor Tank MixerDocument2 pagesEdutor Tank MixerLeandro BuosiNo ratings yet
- MixerDocument48 pagesMixerzueklateNo ratings yet
- Equalization Tank-Homogenization TankDocument16 pagesEqualization Tank-Homogenization TankAnusha GsNo ratings yet
- Oil and Gas Artificial Fluid Lifting TechniquesFrom EverandOil and Gas Artificial Fluid Lifting TechniquesRating: 5 out of 5 stars5/5 (1)
- Sumita PDFDocument5 pagesSumita PDFInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Exponential Smoothing of Postponement Rates in Operation Theatres of Advanced Pediatric Centre - Time Series Forecasting With Regression AnalysisDocument7 pagesExponential Smoothing of Postponement Rates in Operation Theatres of Advanced Pediatric Centre - Time Series Forecasting With Regression AnalysisInternational Jpurnal Of Technical Research And Applications100% (2)
- Sumita PDFDocument5 pagesSumita PDFInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Aesthetics of The Triumphant Tone of The Black Woman in Alice Walker's The Color PurpleDocument30 pagesAesthetics of The Triumphant Tone of The Black Woman in Alice Walker's The Color PurpleInternational Jpurnal Of Technical Research And Applications100% (2)
- Energy Gap Investigation and Characterization of Kesterite Cu2znsns4 Thin Film For Solar Cell ApplicationsDocument4 pagesEnergy Gap Investigation and Characterization of Kesterite Cu2znsns4 Thin Film For Solar Cell ApplicationsInternational Jpurnal Of Technical Research And Applications100% (1)
- Postponement of Scheduled General Surgeries in A Tertiary Care Hospital - A Time Series Forecasting and Regression AnalysisDocument6 pagesPostponement of Scheduled General Surgeries in A Tertiary Care Hospital - A Time Series Forecasting and Regression AnalysisInternational Jpurnal Of Technical Research And Applications100% (2)
- Study of Nano-Systems For Computer SimulationsDocument6 pagesStudy of Nano-Systems For Computer SimulationsInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Digital Compressing of A BPCM Signal According To Barker Code Using FpgaDocument7 pagesDigital Compressing of A BPCM Signal According To Barker Code Using FpgaInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Effect of Trans-Septal Suture Technique Versus Nasal Packing After SeptoplastyDocument8 pagesEffect of Trans-Septal Suture Technique Versus Nasal Packing After SeptoplastyInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- An Experimental Study On Separation of Water From The Atmospheric AirDocument5 pagesAn Experimental Study On Separation of Water From The Atmospheric AirInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Pod-Pwm Based Capacitor Clamped Multilevel InverterDocument3 pagesPod-Pwm Based Capacitor Clamped Multilevel InverterInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Implementation of Methods For Transaction in Secure Online BankingDocument3 pagesImplementation of Methods For Transaction in Secure Online BankingInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Li-Ion Battery Testing From Manufacturing To Operation ProcessDocument4 pagesLi-Ion Battery Testing From Manufacturing To Operation ProcessInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Modelling The Impact of Flooding Using Geographic Information System and Remote SensingDocument6 pagesModelling The Impact of Flooding Using Geographic Information System and Remote SensingInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Qualitative Risk Assessment and Mitigation Measures For Real Estate Projects in MaharashtraDocument9 pagesQualitative Risk Assessment and Mitigation Measures For Real Estate Projects in MaharashtraInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- An Inside Look in The Electrical Structure of The Battery Management System Topic Number: Renewable Power Sources, Power Systems and Energy ConversionDocument5 pagesAn Inside Look in The Electrical Structure of The Battery Management System Topic Number: Renewable Power Sources, Power Systems and Energy ConversionInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Scope of Replacing Fine Aggregate With Copper Slag in Concrete - A ReviewDocument5 pagesScope of Replacing Fine Aggregate With Copper Slag in Concrete - A ReviewInternational Jpurnal Of Technical Research And Applications100% (1)
- Evaluation of Drainage Water Quality For Irrigation by Integration Between Irrigation Water Quality Index and GisDocument9 pagesEvaluation of Drainage Water Quality For Irrigation by Integration Between Irrigation Water Quality Index and GisInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Parametric Modeling of Voltage Drop in Power Distribution NetworksDocument4 pagesParametric Modeling of Voltage Drop in Power Distribution NetworksInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- The Construction Procedure and Advantage of The Rail Cable-Lifting Construction Method and The Cable-Hoisting MethodDocument3 pagesThe Construction Procedure and Advantage of The Rail Cable-Lifting Construction Method and The Cable-Hoisting MethodInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Time Efficient Baylis-Hillman Reaction On Steroidal Nucleus of Withaferin-A To Synthesize Anticancer AgentsDocument5 pagesTime Efficient Baylis-Hillman Reaction On Steroidal Nucleus of Withaferin-A To Synthesize Anticancer AgentsInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Production of Starch From Mango (Mangifera Indica.l) Seed Kernel and Its CharacterizationDocument4 pagesProduction of Starch From Mango (Mangifera Indica.l) Seed Kernel and Its CharacterizationInternational Jpurnal Of Technical Research And Applications100% (1)
- Performance Analysis of Microstrip Patch Antenna Using Coaxial Probe Feed TechniqueDocument3 pagesPerformance Analysis of Microstrip Patch Antenna Using Coaxial Probe Feed TechniqueInternational Jpurnal Of Technical Research And Applications100% (1)
- A Study On The Fresh Properties of SCC With Fly AshDocument3 pagesA Study On The Fresh Properties of SCC With Fly AshInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Open Loop Analysis of Cascaded Hbridge Multilevel Inverter Using PDPWM For Photovoltaic SystemsDocument3 pagesOpen Loop Analysis of Cascaded Hbridge Multilevel Inverter Using PDPWM For Photovoltaic SystemsInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Physico-Chemical and Bacteriological Assessment of River Mudzira Water in Mubi, Adamawa State.Document4 pagesPhysico-Chemical and Bacteriological Assessment of River Mudzira Water in Mubi, Adamawa State.International Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Overview of TCP Performance in Satellite Communication NetworksDocument5 pagesOverview of TCP Performance in Satellite Communication NetworksInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Structural and Dielectric Studies of Terbium Substituted Nickel Ferrite NanoparticlesDocument3 pagesStructural and Dielectric Studies of Terbium Substituted Nickel Ferrite NanoparticlesInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Investigation of Coverage Level and The Availability of GSM Signal in Ekpoma, NigeriaDocument6 pagesInvestigation of Coverage Level and The Availability of GSM Signal in Ekpoma, NigeriaInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Study of Carbohydrate Metabolism in Severe Acute Malnutrition and Correlations of Weight and Height With Pp-Sugar and BmiDocument9 pagesStudy of Carbohydrate Metabolism in Severe Acute Malnutrition and Correlations of Weight and Height With Pp-Sugar and BmiInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Combustion: Technological University of The PhilippinesDocument14 pagesCombustion: Technological University of The PhilippinesMatthew Anthony MallariNo ratings yet
- SedimentationDocument39 pagesSedimentationConrad MonterolaNo ratings yet
- Explanation Plate StaadDocument3 pagesExplanation Plate StaadMarius RizeaNo ratings yet
- Gas Liquid Separators Sizing Parameter MM083015Document42 pagesGas Liquid Separators Sizing Parameter MM083015Mubarik AliNo ratings yet
- GasesDocument2 pagesGasesJason TaburnalNo ratings yet
- Topic1 StaticDocument29 pagesTopic1 StaticMohamad Muslihuddin RazaliNo ratings yet
- Control Valve Application Technology PreviewDocument20 pagesControl Valve Application Technology PreviewKatherine Fikii100% (1)
- Solutions to Exercises: The First LawDocument49 pagesSolutions to Exercises: The First LawMarilene SantosNo ratings yet
- Read Each Statement Carefully. Then, Circle Either T (True) or F (False) As Your AnswerDocument10 pagesRead Each Statement Carefully. Then, Circle Either T (True) or F (False) As Your AnswerOsama Al MazrouaiNo ratings yet
- CET I 3.PVT Relationship 2021 Part 2Document47 pagesCET I 3.PVT Relationship 2021 Part 2Dhruv AgarwalNo ratings yet
- Donaldson Indust Water Process ChillersDocument6 pagesDonaldson Indust Water Process ChillersJeEJyZaNo ratings yet
- Relationship BTWN Pressure & VolumeDocument1 pageRelationship BTWN Pressure & Volumeareyouthere92No ratings yet
- Eso201A: Thermodynamics 2020-21 Ist Semester IIT Kanpur Instructor: P.A.ApteDocument17 pagesEso201A: Thermodynamics 2020-21 Ist Semester IIT Kanpur Instructor: P.A.ApteJitesh HemjiNo ratings yet
- WTT - Cat - 1-QPDocument1 pageWTT - Cat - 1-QPCharlieNo ratings yet
- Exercise 6: Dew Point and Bubble Point Calculation: Assignment 1Document2 pagesExercise 6: Dew Point and Bubble Point Calculation: Assignment 1Junaid0% (1)
- Gujarat Technological University: Page 1 of 4Document4 pagesGujarat Technological University: Page 1 of 4Mehul MunshiNo ratings yet
- SHEAR AND BENDING DIAGRAMSDocument10 pagesSHEAR AND BENDING DIAGRAMSËmêrson SîntujNo ratings yet
- Investigation of Torsional Wave Propagation in Sandwiched Magneto-Poroelastic Dissipative Transversely Isotropic MediumDocument26 pagesInvestigation of Torsional Wave Propagation in Sandwiched Magneto-Poroelastic Dissipative Transversely Isotropic MediumNanda KumarNo ratings yet
- AIAA 1394992 An A&odynamic Model For Symmetric Sabotl SeparationDocument12 pagesAIAA 1394992 An A&odynamic Model For Symmetric Sabotl SeparationLalNo ratings yet
- Process Plant Simulation Lab Exercise-2 Simulations using DWSIM (ReactorsDocument1 pageProcess Plant Simulation Lab Exercise-2 Simulations using DWSIM (ReactorsAbhisek AgarwalNo ratings yet
- Accepted Manuscript: 10.1016/j.jngse.2016.12.017Document30 pagesAccepted Manuscript: 10.1016/j.jngse.2016.12.017Erica MagnagoNo ratings yet
- 0635 EurotrussAlu Checker V1.0Document34 pages0635 EurotrussAlu Checker V1.0Percy Arana PumaNo ratings yet
- A Presentation On 'Maxwell's Demon'Document27 pagesA Presentation On 'Maxwell's Demon'luciferlightNo ratings yet
- Compressibl E Aerodynamic S: Dr. Dilip A Shah Dr. Vishnu Kumar G CDocument11 pagesCompressibl E Aerodynamic S: Dr. Dilip A Shah Dr. Vishnu Kumar G CGCVishnuKumarNo ratings yet
- MOS-2 MarksDocument18 pagesMOS-2 MarksGowri ShankarNo ratings yet
- Shear StrengthDocument37 pagesShear Strengthahmed yehiaNo ratings yet
- Class Example KENPAVE 5-Layer AnalysisDocument9 pagesClass Example KENPAVE 5-Layer AnalysisPratuang Inkoom100% (2)
- ASTM C 158 Standard Test Methods For Strength of Glass by Flexure (Determination of Modulus of RuDocument9 pagesASTM C 158 Standard Test Methods For Strength of Glass by Flexure (Determination of Modulus of RuRyan Lasaca100% (1)
- Materi Ujian Komprehensif: Teknik Reservoir IDocument2 pagesMateri Ujian Komprehensif: Teknik Reservoir IdoubleulandNo ratings yet
- Monopole Base Plate - TIADocument2 pagesMonopole Base Plate - TIAAnonymous D2iC3RtKONo ratings yet