You might also like
- Excitation System.Document84 pagesExcitation System.Ravi Kumar Bandarulanka100% (2)
- Megadrive Lci 1Document28 pagesMegadrive Lci 1lollollol1515615df4gNo ratings yet
- K. Arputharaju, Assistant Executive Engineer / Operation, Basin Bridge Gas Turbine Power Station, TANGEDCO, TNEB LTD., Chennai - 600 012Document20 pagesK. Arputharaju, Assistant Executive Engineer / Operation, Basin Bridge Gas Turbine Power Station, TANGEDCO, TNEB LTD., Chennai - 600 012navi_0403No ratings yet
- Lci DriveDocument92 pagesLci DriveDev Swain50% (2)
- Synchronous Motor Drives - LCIDocument15 pagesSynchronous Motor Drives - LCIJoyson PereiraNo ratings yet
- EX2100 Excitation SystemDocument26 pagesEX2100 Excitation SystemJeziel Juárez100% (2)
- GEI-100256-Receiving, Handling and Storage of GE Drive and Excitation Control EquipmentDocument12 pagesGEI-100256-Receiving, Handling and Storage of GE Drive and Excitation Control EquipmentLê Trung DũngNo ratings yet
- EX2100e Fact SheetDocument2 pagesEX2100e Fact Sheetnabil160874No ratings yet
- Excitation GE 2100Document21 pagesExcitation GE 2100KVV100% (2)
- A30 1 PDFDocument2 pagesA30 1 PDFscribdkhatnNo ratings yet
- GE Energy: Exciter Ac Feedback Board IS200EACFG - ADocument12 pagesGE Energy: Exciter Ac Feedback Board IS200EACFG - AFathi YahyaouiNo ratings yet
- Project Work - Excitation SystemDocument58 pagesProject Work - Excitation SystemKaranki DineshNo ratings yet
- GE Energy: Exciter DC Feedback Board IS200EDCFG1ADocument12 pagesGE Energy: Exciter DC Feedback Board IS200EDCFG1AFathi YahyaouiNo ratings yet
- Rotating diode exciter design for nuclear plantsDocument9 pagesRotating diode exciter design for nuclear plantsR0B0T2013No ratings yet
- Voltage Sag-Piller Datacentre Dynamic Dubai Piller PDFDocument54 pagesVoltage Sag-Piller Datacentre Dynamic Dubai Piller PDFNgern KlangNo ratings yet
- Operation Manual for the D3 Starting ConverterDocument8 pagesOperation Manual for the D3 Starting ConverterOsama Kamel ElghitanyNo ratings yet
- Electrical One Line DiagDocument5 pagesElectrical One Line DiagdownloadizNo ratings yet
- Replacement of Power Supply Module Battery For GT1 and GT2 Multiling GCP2100 G60 and T60 Protection RelayDocument11 pagesReplacement of Power Supply Module Battery For GT1 and GT2 Multiling GCP2100 G60 and T60 Protection RelayJerry J WenNo ratings yet
- GEH-6676C - Power Systems StabilizerDocument64 pagesGEH-6676C - Power Systems Stabilizerdownloadiz100% (1)
- Ge Gas Turbine Frame (9fa)Document7 pagesGe Gas Turbine Frame (9fa)ajo zinzoNo ratings yet
- Kestrel Chapter 6 - Power System StabilizersDocument10 pagesKestrel Chapter 6 - Power System StabilizerssulemankhalidNo ratings yet
- EX2000 Trouble ShootingDocument2 pagesEX2000 Trouble Shootingudan terossNo ratings yet
- OPP06342A1 - Generator Technical DataDocument18 pagesOPP06342A1 - Generator Technical DataVijayaNo ratings yet
- Generator Operation ModeDocument4 pagesGenerator Operation ModeArdhan BoyzzNo ratings yet
- List of Effective PagesDocument7 pagesList of Effective PagesexergicNo ratings yet
- Sertel Electronics: User ManualDocument18 pagesSertel Electronics: User ManualADE mrtNo ratings yet
- Calculate Cable Sizing for Electrical CircuitsDocument15 pagesCalculate Cable Sizing for Electrical CircuitsShubhankar KunduNo ratings yet
- MDAHitachi VCS6000 Brochure1Document8 pagesMDAHitachi VCS6000 Brochure1rhoney012No ratings yet
- Static Ex SystemDocument28 pagesStatic Ex Systemvasanth11kvNo ratings yet
- Geh 6676BDocument62 pagesGeh 6676BAli Ball100% (1)
- HMI Configuration Setup r1Document13 pagesHMI Configuration Setup r1Mohamed AmineNo ratings yet
- Excitation Sys & SFCDocument55 pagesExcitation Sys & SFCABVSAI100% (1)
- GEH-6795-EX2100e Excitation Control Engineering Work Station HMI User GuideDocument32 pagesGEH-6795-EX2100e Excitation Control Engineering Work Station HMI User GuideLê Trung DũngNo ratings yet
- Performance Analysis of CCGT Power Plant Using MATLAB Simulink Based SimulationDocument6 pagesPerformance Analysis of CCGT Power Plant Using MATLAB Simulink Based SimulationTochi Krishna Abhishek100% (1)
- LCI Starters by GE.Document28 pagesLCI Starters by GE.Suraj KumarNo ratings yet
- 2x1450KVA Mitsubishi DG Set With AGC242 Parallel With Grid by AGC246Document7 pages2x1450KVA Mitsubishi DG Set With AGC242 Parallel With Grid by AGC246Rizal HR IDNo ratings yet
- Prismic A30Document2 pagesPrismic A30ario2481No ratings yet
- BRUSH Technical SectionDocument57 pagesBRUSH Technical Section3319826No ratings yet
- E ASY ASY RevbDocument7 pagesE ASY ASY RevbVirajitha Maddumabandara0% (1)
- Ge 6F.01 PDFDocument4 pagesGe 6F.01 PDFkangsungjin100% (1)
- Siemens Hydrogen-Cooled Generators With Water-Cooled Stator WindingsDocument3 pagesSiemens Hydrogen-Cooled Generators With Water-Cooled Stator WindingsPradeep_VashistNo ratings yet
- TPG - PHBTM Bus VT (20 KV Switchgear) Siemens - Gi SilaeDocument3 pagesTPG - PHBTM Bus VT (20 KV Switchgear) Siemens - Gi SilaeIchal_scribdNo ratings yet
- Static Var CompensatorDocument29 pagesStatic Var CompensatorCarlos Fabian GallardoNo ratings yet
- 9FB Gas TurbineDocument2 pages9FB Gas TurbineRene GonzalezNo ratings yet
- A3100 PDFDocument2 pagesA3100 PDFirfanWPKNo ratings yet
- Thyne1 Model Rev11 - PaDocument25 pagesThyne1 Model Rev11 - PaKatherine M. Castillo100% (1)
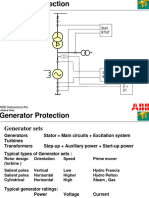
- Generator Protection Guide for Faults and Abnormal ConditionsDocument86 pagesGenerator Protection Guide for Faults and Abnormal ConditionsAbhishek RajputNo ratings yet
- GEH-6794-EX2100e Excitation Control Operation GuideDocument62 pagesGEH-6794-EX2100e Excitation Control Operation GuideLê Trung Dũng100% (1)
- Introduction To Synchronizing PDFDocument20 pagesIntroduction To Synchronizing PDFPaijo nDesoNo ratings yet
- Generator Protection Relay DGP ManualDocument278 pagesGenerator Protection Relay DGP ManualArif KhattakNo ratings yet
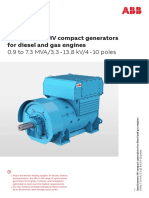
- Catalog Compact HV Engine 9AKK106113 RevF en 06-2019 LowresDocument28 pagesCatalog Compact HV Engine 9AKK106113 RevF en 06-2019 LowresAlry PurwariyadiNo ratings yet
- Ex2100 PDFDocument118 pagesEx2100 PDFMohammed FaresNo ratings yet
- Static Excitation EquipmentDocument54 pagesStatic Excitation EquipmentAshish Kumar MehtoNo ratings yet
- Generator Operation ModesDocument5 pagesGenerator Operation ModesWong TerbiumNo ratings yet
- PRISMIC A12 Excitation ControllerDocument2 pagesPRISMIC A12 Excitation ControllerJS168No ratings yet
- A Hybrid Solution For Load-Commutated-Inverter-Fed Induction Motor DrivesDocument8 pagesA Hybrid Solution For Load-Commutated-Inverter-Fed Induction Motor DrivesishtiyqueNo ratings yet
- Hyper Ser DriveDocument10 pagesHyper Ser DriveRommel100% (1)
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- Catalo Inverter HyundaiDocument16 pagesCatalo Inverter HyundaiJose Villalobos CoralNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Wind in DenmarkDocument10 pagesWind in DenmarkKVVNo ratings yet
- Black PV ModuleDocument2 pagesBlack PV ModuleKVVNo ratings yet
- Generator & Exciter BasicDocument8 pagesGenerator & Exciter Basictowfiqeee100% (1)
- Land-Use Requirements of Modern Wind Power PlantsDocument46 pagesLand-Use Requirements of Modern Wind Power PlantsKVVNo ratings yet
- Active and Passive NetworksDocument14 pagesActive and Passive NetworksKVVNo ratings yet
- Solar CellDocument5 pagesSolar CellpurushothamkrNo ratings yet
- Frequency Response StudyDocument114 pagesFrequency Response StudyKVVNo ratings yet
- GE ExciterDocument8 pagesGE ExciterKVVNo ratings yet
- Generator ExcitationDocument4 pagesGenerator ExcitationKVVNo ratings yet
- Super CapacitorsDocument23 pagesSuper CapacitorsKVVNo ratings yet
- Impacts of Wind FarmsDocument20 pagesImpacts of Wind FarmsKVVNo ratings yet
- Power Quality Impact of A Small Wind SystemsDocument4 pagesPower Quality Impact of A Small Wind SystemsKVVNo ratings yet
- Simulation of Grid-Connected Photovoltaic SystemDocument7 pagesSimulation of Grid-Connected Photovoltaic SystemKVVNo ratings yet
- IecWP Energystorage LR enDocument92 pagesIecWP Energystorage LR enBaneeIshaqueKNo ratings yet
- Characterizations of Solar PVDocument15 pagesCharacterizations of Solar PVKVVNo ratings yet
- Turbines and GoverningDocument31 pagesTurbines and GoverningKVV100% (2)
- Excitation SystemDocument13 pagesExcitation SystemKVVNo ratings yet
- Mathematical Modeling of Gas TurbineDocument7 pagesMathematical Modeling of Gas TurbineKVVNo ratings yet
- Heat Recovery Steam Generators Optimized For Any ApplicationDocument7 pagesHeat Recovery Steam Generators Optimized For Any ApplicationKVVNo ratings yet
- Soalr PV InfoDocument12 pagesSoalr PV InfoKVVNo ratings yet
- D Series Combined Cycle Steam TurbineDocument16 pagesD Series Combined Cycle Steam TurbineKVV100% (1)
- Excitation GE 2100Document21 pagesExcitation GE 2100KVV100% (2)
- GE Gas TurbineDocument24 pagesGE Gas TurbineIwan Surachwanto0% (1)
- GT13E2 Gas Turbine (In Russia and CIS Countries)Document24 pagesGT13E2 Gas Turbine (In Russia and CIS Countries)hoangpalestine100% (1)
- 400kV OHL Protection enDocument44 pages400kV OHL Protection enNikola MugosaNo ratings yet
- GE Generators OverviewDocument16 pagesGE Generators OverviewKVVNo ratings yet
- D Series Combined Cycle Steam TurbineDocument16 pagesD Series Combined Cycle Steam TurbineKVV100% (1)
- D Series Combined Cycle Steam TurbineDocument16 pagesD Series Combined Cycle Steam TurbineKVV100% (1)
- ABB REL 316 4 Numerical Line ProtectionDocument44 pagesABB REL 316 4 Numerical Line Protectiontin_gabby4876100% (2)
- Louis de Broglie BiographyDocument5 pagesLouis de Broglie BiographyLeiko RaveloNo ratings yet
- The Design of Welding Tooling For Split Console FrameDocument5 pagesThe Design of Welding Tooling For Split Console FrameVaibhav ShahNo ratings yet
- Tribology International: Kentaro Komori, Noritsugu UmeharaDocument10 pagesTribology International: Kentaro Komori, Noritsugu UmeharaSyed Danish FayazNo ratings yet
- Exploded Parts List 1Document1 pageExploded Parts List 1APEXINDONo ratings yet
- Komatsu PC220 Excavator Standard EquipmentDocument24 pagesKomatsu PC220 Excavator Standard EquipmentWang Zhenping100% (1)
- Contactor Level Letdown Valve: Section 1 General Process DescriptionDocument6 pagesContactor Level Letdown Valve: Section 1 General Process DescriptionIan MannNo ratings yet
- Air Brake Troubleshooting Guide tp9973Document2 pagesAir Brake Troubleshooting Guide tp9973Anonymous 6dNlD7n0100% (6)
- Hydraulic Power Unit Local Control Cubicle: LEN-CK-1-03 AR-ALLDocument9 pagesHydraulic Power Unit Local Control Cubicle: LEN-CK-1-03 AR-ALLLy Thanh HaNo ratings yet
- Reciprocating & Rotary CompressorDocument64 pagesReciprocating & Rotary Compressorraghu.entrepreneur100% (1)
- API Standard 650-Drip Ring For Tank Bottom PlatesDocument2 pagesAPI Standard 650-Drip Ring For Tank Bottom PlatesShankar Pl GowdaNo ratings yet
- Dampers and ActuatorsDocument66 pagesDampers and Actuatorspedro torresNo ratings yet
- Leader in MINI Performance for 30+ YearsDocument36 pagesLeader in MINI Performance for 30+ YearsDustin ShampNo ratings yet
- CALCULATION BEAM ELASTIC FOUNDATIONDocument7 pagesCALCULATION BEAM ELASTIC FOUNDATIONmotiur basumNo ratings yet
- каталог palfinger mbb 1000Document13 pagesкаталог palfinger mbb 1000MixaKranovoiNo ratings yet
- Design and Control of The Pitch of Wind Turbine THDocument6 pagesDesign and Control of The Pitch of Wind Turbine THakhil babu nalliNo ratings yet
- ASME VIII - DIV.1 - UG-28 (F)Document1 pageASME VIII - DIV.1 - UG-28 (F)cwkimNo ratings yet
- Isolated Foundation Calculation Sheet: Greater Mekong Power Network Develvopment ProjectDocument7 pagesIsolated Foundation Calculation Sheet: Greater Mekong Power Network Develvopment ProjectSereyponleu Khun100% (1)
- Minilab SpecsDocument5 pagesMinilab SpecsFrancisco DesiderioNo ratings yet
- Balancing CONCLUSIONDocument2 pagesBalancing CONCLUSIONSyahdi Rosli100% (1)
- Progressive Pigging Guide for Reduced Pipe DiametersDocument1 pageProgressive Pigging Guide for Reduced Pipe DiametersfedermNo ratings yet
- Mac - Ro. System - Steelgrid™ Hr30G: High Resistance Composite Mesh SystemDocument2 pagesMac - Ro. System - Steelgrid™ Hr30G: High Resistance Composite Mesh SystemRodrigo MorgadoNo ratings yet
- SB03 3Document14 pagesSB03 3Clemente Rafael Marval Escalona100% (1)
- Engineering GuideDocument121 pagesEngineering GuidekaushiklmNo ratings yet
- Tower SolutionsDocument50 pagesTower Solutionssaravanan4286100% (1)
- Martin's Bucket Elevator BrochureDocument8 pagesMartin's Bucket Elevator BrochurefarshidNo ratings yet
- Steering Knuckles 4wd CHEVROLET S10Document4 pagesSteering Knuckles 4wd CHEVROLET S10Maxi SardiNo ratings yet
- Hammerschmidt Tech Manual EnglishDocument42 pagesHammerschmidt Tech Manual EnglishffurlanutNo ratings yet
- Rexroth A4VG PumpDocument16 pagesRexroth A4VG PumpFrancisco OcantoNo ratings yet
- Vertical Motor Case History Shurafa IIR Rotate 2012Document4 pagesVertical Motor Case History Shurafa IIR Rotate 2012aal_shurafa100% (1)