You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 5R55W-S Repair DiagnosisDocument70 pages5R55W-S Repair Diagnosisaxallindo100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Adventures of Huckleberry Finn by Mark TwainDocument289 pagesThe Adventures of Huckleberry Finn by Mark TwainBooks100% (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Disturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignDocument10 pagesDisturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignPhạm Văn TưởngNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Icf 7 Module First YearDocument180 pagesIcf 7 Module First YearMarvin PanlilioNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Calculation of Short-Circuit CurrentsDocument35 pagesCalculation of Short-Circuit CurrentsdaodoquangNo ratings yet
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDocument44 pagesEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaNo ratings yet
- Introduction To PercolationDocument25 pagesIntroduction To Percolationpasomaga100% (1)
- Pneumatic Conveying of Bulk Solids PDFDocument231 pagesPneumatic Conveying of Bulk Solids PDFCarloLopez100% (2)
- AN296110 Current Sensing For Renewable EnergyDocument4 pagesAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngNo ratings yet
- All About HarmonicsDocument240 pagesAll About HarmonicsKhushal KharadeNo ratings yet
- Solution Manual For Introductory Statistics 9th Edition by Mann Chapters 1 13 PDFDocument10 pagesSolution Manual For Introductory Statistics 9th Edition by Mann Chapters 1 13 PDFa40095824643% (14)
- Ethernet IP Texas InstrumentsDocument6 pagesEthernet IP Texas InstrumentsFranzKafkaNo ratings yet
- Steam Turbine ProtectionDocument5 pagesSteam Turbine ProtectionRajesh P100% (1)
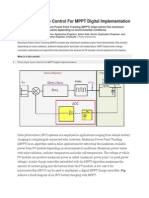
- Direct Duty Cycle Control For MPPT Digital ImplementationDocument5 pagesDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngNo ratings yet
- Uhc AwatersDocument60 pagesUhc Awaterskammu9713No ratings yet
- C Programming For Embedded System Applications PDFDocument54 pagesC Programming For Embedded System Applications PDFWendo David PesaNo ratings yet
- 309 An 09 Solar Panel PowerDocument3 pages309 An 09 Solar Panel PowerJoel Medina GuttiNo ratings yet
- Tutorial Digital Control Loop DesignDocument17 pagesTutorial Digital Control Loop DesignPhạm Văn TưởngNo ratings yet
- Study of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuDocument8 pagesStudy of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuPhạm Văn Tưởng100% (1)
- Evaluation and DSP Based Implementation of PWM Approaches For SinDocument90 pagesEvaluation and DSP Based Implementation of PWM Approaches For SinPhạm Văn TưởngNo ratings yet
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocument9 pagesUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngNo ratings yet
- Current-Transformer Phase-Shift Compensation and CalibrationDocument7 pagesCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjNo ratings yet
- Slaa 075Document19 pagesSlaa 075Manidhar ParvatamNo ratings yet
- 1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemsDocument6 pages1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemschethanNo ratings yet
- An Improved PV Battery Charger For Low Cost Low PowerDocument4 pagesAn Improved PV Battery Charger For Low Cost Low PowerPhạm Văn TưởngNo ratings yet
- IEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsDocument9 pagesIEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsPhạm Văn TưởngNo ratings yet
- (Matsui) Sensorless PM Brushless DC Motor DrivesDocument9 pages(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngNo ratings yet
- Informatics in Control Automation and RoboticsDocument5 pagesInformatics in Control Automation and RoboticsPhạm Văn TưởngNo ratings yet
- A Novel Dynamic Var CompensatorDocument4 pagesA Novel Dynamic Var CompensatorPhạm Văn TưởngNo ratings yet
- IEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityDocument7 pagesIEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityPhạm Văn TưởngNo ratings yet
- Inverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewDocument6 pagesInverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewPhạm Văn TưởngNo ratings yet
- TW Exams Ielts How To Prepare Ielts TipsDocument2 pagesTW Exams Ielts How To Prepare Ielts TipsHoda ElhadaryNo ratings yet
- NHSPE ReadingDocument5 pagesNHSPE ReadingMohamed HanafiNo ratings yet
- Space Vector Modulation An IntroductionDocument10 pagesSpace Vector Modulation An IntroductionJohan LinderNo ratings yet
- Phan Tich 1 Bai Task 2 by Ngoc BachDocument4 pagesPhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- Factors That Affect College Students' Attitudes Toward MathematicsDocument17 pagesFactors That Affect College Students' Attitudes Toward MathematicsAnthony BernardinoNo ratings yet
- (Complete) Electrolysis of Copper SulphateDocument4 pages(Complete) Electrolysis of Copper SulphateNoooooNo ratings yet
- An4879 Introduction To Usb Hardware and PCB Guidelines Using Stm32 Mcus StmicroelectronicsDocument26 pagesAn4879 Introduction To Usb Hardware and PCB Guidelines Using Stm32 Mcus StmicroelectronicsBulentNo ratings yet
- Solenoid ValveDocument76 pagesSolenoid ValveazlanNo ratings yet
- 1.summative-Test Math7Document1 page1.summative-Test Math7Jaylor GaridoNo ratings yet
- Science BDocument2 pagesScience BIyer JuniorNo ratings yet
- Projector Spec 8040Document1 pageProjector Spec 8040Radient MushfikNo ratings yet
- 7625-300 Vitamin B12 AccuBind ELISA Rev 6Document2 pages7625-300 Vitamin B12 AccuBind ELISA Rev 6carlosalfredorivasNo ratings yet
- Satisfaction and Revisit Intentions at Fast Food RestaurantsDocument12 pagesSatisfaction and Revisit Intentions at Fast Food RestaurantsKunal LodhiNo ratings yet
- Fundamentals Writing Prompts: TechnicalDocument25 pagesFundamentals Writing Prompts: TechnicalFjvhjvgNo ratings yet
- Sample Chapter - Oil and Gas Well Drilling Technology PDFDocument19 pagesSample Chapter - Oil and Gas Well Drilling Technology PDFDavid John100% (1)
- Introduction To Java Programming ReviewerDocument90 pagesIntroduction To Java Programming ReviewerJohn Ryan FranciscoNo ratings yet
- Bloom QuestionsDocument270 pagesBloom QuestionsrameshsmeNo ratings yet
- Life Processes: Science Unit 1Document19 pagesLife Processes: Science Unit 1patil pratikNo ratings yet
- K20 Engine Control Module X3 (Lt4) Document ID# 4739106Document3 pagesK20 Engine Control Module X3 (Lt4) Document ID# 4739106Data TécnicaNo ratings yet
- Tutorial 1 SolutionsDocument4 pagesTutorial 1 Solutionsteju1996coolNo ratings yet
- Design and Analysis of Monopole Circularly Polarised Microstrip Patch Antenna Using HFSSDocument17 pagesDesign and Analysis of Monopole Circularly Polarised Microstrip Patch Antenna Using HFSSKashif FurkanNo ratings yet
- V. Activities: A. Directions: Do The Activity Below. (20 PTS.) Note: Work On This OfflineDocument7 pagesV. Activities: A. Directions: Do The Activity Below. (20 PTS.) Note: Work On This OfflineKeith Neomi CruzNo ratings yet
- Biztalk and Oracle IntegrationDocument2 pagesBiztalk and Oracle IntegrationkaushiksinNo ratings yet
- Symmetries and Conservation Laws-Consequences of Noether TheoremDocument8 pagesSymmetries and Conservation Laws-Consequences of Noether TheoremmastinaropuruNo ratings yet
- Flexenclosure Esite Brochure PDFDocument5 pagesFlexenclosure Esite Brochure PDFajdCruiseNo ratings yet
- Ticket Eater - User Manual 2006Document24 pagesTicket Eater - User Manual 2006tokio2424No ratings yet