Professional Documents
Culture Documents
Hidrodinâmica Pnv5200 Apostila 2007
Uploaded by
Elói AraújoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Hidrodinâmica Pnv5200 Apostila 2007
Uploaded by
Elói AraújoCopyright:
Available Formats
Departamento de Engenharia Naval e Ocenica
Escola Politcnica da Universidade de So Paulo
HIDRODINMICA I
Alexandre Nicolaos Simos
Texto de apoio disciplina PNV5200
VERSO PRELIMINAR
2006
Hidrodinmica I
ndice
1. INTRODUO.............................................................................................................. 1
2. FUNDAMENTOS DE MECNICA DOS FLUIDOS............................................... 19
2.1. As Equaes Constitutivas da Dinmica dos Fluidos: uma perspectiva histrica... 20
2.2. Escoamentos Irrotacionais: Teoria do Potencial ........................................................ 29
2.2.1. Irrotacionalidade e o Potencial de Velocidades........................................................................ 30
2.2.2. O Problema de Contorno.......................................................................................................... 33
2.2.3. Aspectos Importantes da Soluo do Problema de Contorno................................................... 36
2.2.4. Foras Hidrodinmicas............................................................................................................. 40
2.2.5. Massa Adicional ....................................................................................................................... 49
3. TEORIA LINEAR DE ONDAS DE GRAVIDADE................................................... 53
3.1. Nota Histrica ................................................................................................................ 54
3.2. O Problema de Contorno: Ondas Planas Progressivas .............................................. 58
3.3. Energia............................................................................................................................ 69
3.4. Efeitos de Profundidade Varivel................................................................................. 72
3.5. Superposio de Ondas Planas ..................................................................................... 77
3.6. Ondas Irregulares .......................................................................................................... 83
3.6.1. A Estatstica das Ondas do Mar................................................................................................ 87
3.6.2. Espectro de Energia das Ondas do Mar.................................................................................... 93
3.6.3. Espectros de Energia Padro.................................................................................................. 101
3.6.4. Espalhamento Direcional........................................................................................................ 106
3.6.5. Aspectos Bsicos da Gerao de Ondas do Mar..................................................................... 107
4. DINMICA DE SISTEMAS OCENICOS EM ONDAS....................................... 116
4.1. Hipteses Simplificadoras ........................................................................................... 116
4.2. Definies e Hidrosttica............................................................................................. 121
4.3. Foras Hidrodinmicas ............................................................................................... 127
4.3.1. Massa Adicional e Amortecimento de Radiao.................................................................... 132
4.3.2. Foras de Excitao em Ondas............................................................................................... 135
4.3.2.1 Aproximao no Regime de Ondas Longas.................................................................. 139
4.3.2.2 A Frmula de Morison.................................................................................................. 142
4.4. Resposta em Ondas Regulares.................................................................................... 144
4.4.1. Incorporao de Amortecimento Viscoso............................................................................... 150
4.5. Resposta em Ondas Irregulares.................................................................................. 152
4.5.1. A Abordagem no Domnio do Tempo.................................................................................... 155
4.6. Determinao dos Coeficientes Potenciais................................................................. 158
5. UMA INTRODUO AOS EFEITOS HIDRODINMICOS DE SEGUNDA-
ORDEM............................................................................................................................. 161
REFERNCIAS BIBILOGRFICAS ............................................................................. 162
Hidrodinmica I 1
1. INTRODUO
...there was far more imagination in the head of
Archimedes than in that of Homer.
Voltaire
O curso: Objetivos, contedo, abordagem e aspectos gerais
A mecnica dos fluidos uma das cincias fundamentais para diversas
reas da engenharia, como a engenharia mecnica, hidrulica, aeronutica, naval
e ocenica. Obviamente, cada uma das diferentes reas de aplicao tecnolgica
requer conhecimentos especficos e, assim, por exemplo, efeitos de
compressibilidade no escoamento se mostram de fundamental importncia para a
engenharia aeronutica, enquanto efeitos de superfcie-livre esto freqentemente
presentes nos estudos de engenharia naval e ocenica.
O desafio do engenheiro naval consiste em projetar sistemas que
naveguem ou permaneam estacionrios na superfcie da gua ou imersos de
forma eficiente. A medida de tal eficincia depende do tipo de sistema em
questo, mas, de uma maneira geral, objetivos como a reduo da potncia
necessria para navegao, um bom comportamento em ondas, estabilidade
direcional e manobrabilidade so constantemente perseguidos. Para que estes
objetivos possam ser alcanados, fundamental o conhecimento das foras
externas que atuaro sobre o sistema, permitindo uma correta avaliao de sua
dinmica sobre a ao destas foras. Alm das foras aerodinmicas decorrentes
da ao do vento, os sistemas navais e ocenicos esto constantemente
submetidos ao de correntezas e ondas de superfcie. Conseqentemente, a
hidrodinmica assume papel crucial na formao do engenheiro naval, permitindo
que o mesmo modele a ao destes agentes ambientais e, dessa forma, possa
prever suas conseqncias sobre o sistema a ser projetado.
Hidrodinmica I 2
As aplicaes da hidrodinmica na rea de engenharia naval e ocenica
so vastas. Em geral, o estudo do desempenho hidrodinmico de uma
embarcao pode ser desmembrado em trs reas principais: resistncia e
propulso, manobrabilidade e comportamento no mar (seakeeping). Este ltimo
tpico de estudo , justamente, o alvo principal deste curso.
A disciplina PNV 5200 (Hidrodinmica I) foi elaborada como uma disciplina
bsica em hidrodinmica, sugerida como um estgio inicial queles que
pretendem uma especializao nesta rea. Seu enfoque recai sobre aspectos de
comportamento no mar de navios e sistemas ocenicos, dando maior nfase a
estes ltimos (sistemas estacionrios), os quais englobam, por exemplo,
plataformas flutuantes de prospeco de petrleo no mar. Ao contrrio dos
estudos de resistncia, propulso ou manobrabilidade, para os quais os efeitos de
viscosidade e vorticidade do escoamento so primordiais, os movimentos de
corpos flutuantes em ondas no so, grosso modo, afetados por tais efeitos de
forma to significativa. Assim, boa parte da teoria apresentada neste texto regida
pela hiptese de fluido ideal. As bases para o estudo de escoamentos potenciais
j foram estabelecidas nas disciplinas de mecnica dos fluidos e, para os
graduandos ou graduados em engenharia naval, na disciplina de mecnica dos
meios contnuos. Dessa forma, este texto apresenta apenas uma breve reviso
das equaes constitutivas da mecnica dos fluidos e das hipteses
simplificadoras que adotaremos para a modelagem matemtica. Espera-se
tambm que o aluno tenha conceitos bsicos de funes analticas
1
e
conhecimentos de dinmica dos corpos rgidos, mecnica analtica e estatstica,
bem como noes fundamentais de mtodos numricos normalmente empregados
para a soluo de problemas de contorno (especialmente o Mtodo de Elementos
de Contorno apresentado aos alunos do curso de engenharia naval nas disciplinas
de mtodos computacionais).
Aps uma breve reviso de mecnica dos fluidos, o curso passa a enfocar
a modelagem do ambiente martimo, adentrando pela Teoria Linear de Ondas de
1
procedimento usual tratar os potenciais de velocidade do escoamento como funes
complexas, tomando partido do carter harmnico de suas variaes no tempo.
Hidrodinmica I 3
Gravidade como base para a representao estatstica das ondas de superfcie do
mar. Neste contexto, so tambm discutidos aspectos bsicos de gerao de
ondas martimas. Segue-se um estudo do comportamento dinmico de estruturas
flutuantes em ondas e a discusso dos mtodos computacionais usualmente
empregados para a soluo do problema de escoamento potencial, suas
vantagens e limitaes. O curso se encerra com uma introduo aos problemas
causados por efeitos hidrodinmicos no-lineares e qual a metodologia bsica
para o tratamento dos mesmos.
importante mencionar, porm, que, muito embora boa parte do curso seja
realmente dedicada apresentao e discusso dos fundamentos tericos de
hidrodinmica de superfcie, os objetivos estaro sempre vinculados a problemas
reais enfrentados atualmente no projeto de sistemas ocenicos, especialmente no
contexto nacional. O carter aplicado do curso se apresenta atravs da
abordagem de problemas atuais de engenharia naval e ocenica e da introduo
s tcnicas hoje disponveis para a avaliao e soluo destes problemas.
Atualmente, no cenrio mundial de explorao de petrleo e gs no mar,
um dos principais desafios tecnolgicos que se impem diz respeito viabilizao
de operaes em guas profundas e ultra-profundas, acima de 2000 metros de
lmina dgua. No contexto nacional, esse desafio adquire uma relevncia
especial, uma vez que a maior parte das reservas comprovadas em territrio
nacional se encontram em guas profundas. O problema tem seus
desdobramentos nas mais diferentes reas tecnolgicas em engenharia ocenica,
e, particularmente, no estudo hidrodinmico dos sistemas flutuantes. De fato, uma
das principais barreiras hoje enfrentadas neste estudo a crescente dificuldade,
ou mesmo a impossibilidade, j na maioria dos casos, de se realizar ensaios
completos em tanques de provas com modelos em escala reduzida. Esse fato
decorrncia direta das limitaes fsicas destes tanques e do crescente aumento
das lminas dgua operacionais, fato que ser discutido mais profundamente
adiante. Em razo das dificuldades crescentes para a avaliao experimental do
comportamento no mar de sistemas ocenicos em guas profundas, os mtodos
numricos tm se tornado importantes ferramentas de auxlio em projeto. Cada
Hidrodinmica I 4
vez mais, uma abordagem combinada unindo tcnicas experimentais e anlises
numricas vem se definindo como padro para o projeto de novos sistemas
ocenicos de produo de petrleo e gs. Assim, ao longo deste curso, pretende-
se discutir problemas relevantes na rea de engenharia ocenica e quais so as
tcnicas, tanto experimentais quanto numricas, hoje disponveis para sua
soluo, fornecendo o embasamento terico necessrio para a compreenso e o
desenvolvimento de tais tcnicas.
No que se refere a este texto, ele deve ser entendido mais como um guia
para a orientao dos estudos, os quais devem ser complementados atravs de
referncias bibliogrficas especficas sugeridas ao longo do mesmo. O conjunto de
referncias fundamentais que serviro de apoio para o curso composto tanto por
textos j clssicos em hidrodinmica martima, que possibilitam um
aprofundamento nos conceitos bsicos, como textos mais modernos que abordam
especificamente tcnicas experimentais ou numricas usualmente empregadas no
contexto da engenharia naval e ocenica. O aluno deve ter em mente que o
estudo destes textos complementares fundamental para a solidificao dos
conceitos que sero discutidos no curso e para permitir um maior aprofundamento
nos diferentes tpicos de interesse, constituindo requisito bsico para uma
especializao adequada queles que atuam ou pretendem atuar na rea. Uma
descrio mais detalhada das principais referncias bibliogrficas sugeridas
apresentada ao final deste primeiro captulo.
Alguns Problemas Atuais de Interesse
A necessidade de explorao em guas profundas e ultra-profundas orienta
o desenvolvimento tecnolgico no contexto atual da engenharia ocenica mundial
e, particularmente, no caso brasileiro. Esse desafio tem influenciado a rea de
pesquisa e desenvolvimento em engenharia ocenica h anos, desenvolvimento
este que converge, por exemplo, para novas concepes de sistemas flutuantes
capazes de viabilizar tcnica e economicamente a explorao de petrleo a tais
Hidrodinmica I 5
profundidades. No contexto nacional, a importncia estratgica de se enfrentar
esse desafio clara. A Petrobras estima, para 2006, uma produo de 1.9 milhes
de barris por dia, dos quais 70% sero provenientes de reservas em guas
profundas e ultra-profundas na Bacia de Campos. Recentemente, a Petrobras
anunciou a descoberta de um campo de leos leves na Bacia de Santos, de
excelente qualidade, a profundidades mdias de seis mil metros.
Como regra, os custos iniciais envolvidos na concretizao de um novo
sistema de produo so razo direta da profundidade na qual o mesmo ser
instalado. parte as maiores dificuldades de perfurao dos poos, o montante de
linhas de amarrao, cabos umbilicais e risers aumenta, assim como aumentam
as exigncias estruturais sobre os mesmos e, conseqentemente, seu custo por
metro. As maiores dificuldades de fundeio tambm contribuem para elevaes dos
custos. Dessa forma, para garantir a viabilidade econmica da explorao, uma
maior capacidade de produo se faz necessria, com plantas de capacidade na
faixa de 300.000 bopd. Por fim, as maiores exigncias de payload, em conjunto
com as maiores cargas de linhas e cabos, acabam por impor maiores dimenses
dos sistemas flutuantes.
Uma outra caracterstica tem sido perseguida constantemente nos projetos
de sistemas recentes: uma excelente resposta excitao de ondas, com baixos
movimentos verticais resultantes. Um bom comportamento no mar decisivo para
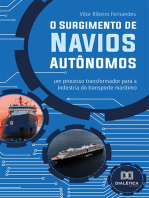
viabilizar o emprego dos chamados risers rgidos. Estes, so compostos
basicamente de uma estrutura de ao com uma concepo estrutural bem mais
simples se comparada aos chamados risers flexveis (ver Figura 1), e, por isso,
mesmo, seu custo/metro muitas vezes inferior.
Uma vez que os custos dos subsistemas submersos (linhas e cabos)
respondem por boa parte do custo total inicial de um sistema de produo, os
risers rgidos rapidamente se tornaram objeto do desejo das indstrias de petrleo.
No obstante a questo do custo, um outro aspecto torna a necessidade de
emprego de risers rgidos ainda mais premente. Os risers flexveis j esbarram,
atualmente, em limitaes de integridade estrutural para resistir s presses
impostas a grandes profundidades.
Hidrodinmica I 6
Figura 1 Representao esquemtica da estrutura de um riser flexvel
(fonte:www.zentech.co.uk)
Por outro lado, os risers rgidos, embora tenham uma resistncia estrutural
muito superior ao colapso, sofrem mais quando expostos a cargas dinmicas,
principalmente aquelas impostas por movimentos verticais nos pontos de conexo
com os sistemas flutuantes. No suportando a flambagem localizada, as cargas de
compresso dinmica s quais estaro submetidos devem ser limitadas. Uma vez
que estas cargas variam diretamente com as amplitudes de movimento de
primeira-ordem do sistema flutuante, decorrem exigncias mais restritivas quanto
ao comportamento no mar dos sistemas que desejem empregar risers rgidos.
H, ainda, uma outra fonte de economia diretamente dependente de uma
boa resposta em ondas: a possibilidade de se adotar completao seca. Por
completao seca entende-se que todo o comando de vlvulas do poo feito no
prprio sistema flutuante e no nas cabeas dos poos (sistema de completao
molhada).
medida que a produo avanava para profundidades maiores, diferentes
concepes de casco foram desenvolvidas. As plataformas semi-submersveis,
tipo de casco que reinava praticamente absoluto entre os sistemas flutuantes de
produo nas dcadas de 1970 e 1980, passaram a perder espao para novas
concepes como as plataformas de pernas tracionadas (Tension Leg Platforms,
ou TLPs) e as plataformas SPAR.
Hidrodinmica I 7
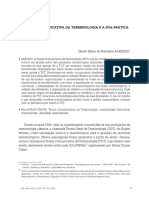
Figura 2 Representao de Plataforma TLP
Os cascos das plataformas TLP em
muito se assemelham aos das semi-
submersveis, mas seus movimentos
verticais so minimizados pela ao de
tendes pr-tracionados fundeados
verticalmente no fundo do mar, os quais
tambm conferem a necessria
restaurao no plano horizontal.
Plataformas TLP passaram a ser
empregadas especialmente no Golfo do
Mxico e hoje operam instaladas em
profundidades superiores a 1000
metros.
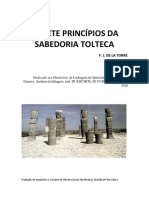
Ao contrrio das plataformas TLP, as
chamadas plataformas SPAR, procuram
reduzir seus movimentos verticais
minimizando as foras hidrodinmicas
de ondas. Seus cascos cilndricos de
grandes calados proporcionam baixa
excitao em primeira-ordem, tirando
proveito do decaimento exponencial do
campo de presses linear induzindo
pelas ondas com a profundidade.
Figura 3 Concepo de Plataforma SPAR
Obviamente, a reduo de movimentos verticais almejada pelos novos
sistemas apresenta um custo em termos de projeto. As TLPs so concepes de
altssimo custo inicial. As plataformas SPAR, por sua vez, sofrem com outros tipos
de excitao hidrodinmica, como os movimentos induzidos por vrtices (vortex
induced motions, ou VIM) resultantes da ao de correntezas martimas. Para
Hidrodinmica I 8
atenuar estes movimentos, supressores de vrtices (denominados strakes) devem
ser posicionados ao longo do casco da plataforma e representam um custo
considervel. Alm disso, como efeitos hidrodinmicos no-lineares devidos
ao de ondas decaem mais lentamente com a profundidade, as plataformas
SPAR sofrem com movimentos angulares de baixa-freqncia (os chamados slow-
pitch e slow-roll)
2
.
No Brasil, condies ambientais menos severas do que aquelas que se
apresentam no Golfo do Mxico ou no Mar do Norte, aliadas a uma conjuntura
econmica particular da Petrobras, levou priorizao de uma configurao
diferente de sistema de produo: os sistemas FPSO (Floating Production,
Storage and Offloading systems). Ao final da dcada de 1980, a Petrobras
contava com uma frota de navios petroleiros do tipo VLCC (Very Large Crude
Carriers) prestes a se tornar obsoleta por sua idade mdia e tambm em virtude
de novas leis internacionais de navegao que exigiam cascos-duplos para
petroleiros. A possibilidade de converso destes navios em sistemas de produo
abria, ento, uma alternativa econmica interessante para o emprego destes
navios e, tomando partido de condies ambientais relativamente brandas nas
costas brasileiras, vrios sistemas FPSO passaram a ser instalados na Bacia de
Campos j no incio da dcada de 1990.
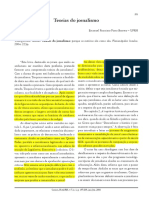
Figura 4 Sistema FPSO
Os sistemas FPSO apresentam
vantagens considerveis em termos de
payload e capacidade de
armazenamento do leo, mas seus
elevados movimentos em ondas
inviabilizam o emprego de risers rgidos
e de completao seca.
2
Uma discusso mais detalhada destes fenmenos ser apresentada no Captulo 6, que traz uma
introduo a problemas hidrodinmicos no-lineares.
Hidrodinmica I 9
Em virtude destas condies particulares, os sistemas ocenicos flutuantes
que entraram em operao no Brasil nos ltimos anos foram todos baseados em
sistemas FPSO e plataformas semi-submersveis.
No entanto, como mencionado acima, o emprego de FPSOs traz consigo
problemas inerentes principalmente aos movimentos induzidos por ondas. Como
seus cascos no foram projetados para serem transparentes s ondas, estes
sistemas so normalmente sujeitos a movimentos verticais de grandes amplitudes,
se comparados aos outros tipos de sistemas flutuantes. As foras de correnteza
experimentadas por seus cascos tambm podem atingir valores elevados,
exigindo sistemas de amarrao mais robustos. Inicialmente, procurando
minimizar os esforos ambientais combinados de ondas, ventos e correntezas, os
sistemas FPSO eram usualmente concebidos na chamada configurao Turret.
Este tipo de configurao consiste em um cilindro inserido na proa do navio e que
suporta todos os risers e linhas de amarrao. Atravs de um sistema de
rolamentos, o casco pode, ento, pivotar em torno do turret, o que permite que o
navio se alinhe com a resultante dos esforos ambientais. Mais recentemente,
porm, sistemas alternativos de amarrao passaram a ser empregados, caso por
exemplo do sistema DICAS (Differential Compliance Anchoring System), o qual
consiste, basicamente, em dois conjuntos de amarras com rigezas diferentes
proa e popa do FPSO, o que confere uma certa flexibilidade ao sistema em
termos de aproamento. Qualquer que seja a configurao da amarrao, contudo,
os sistemas FPSO sofrem intensas solicitaes ambientais. Em situaes
extremas de ondas os movimentos verticais so de tal ordem que inviabilizam o
emprego de risers rgidos, uma sria desvantagem deste tipo de sistema.
A operao de descarregamento (ou alvio) dos sistemas FPSO envolve o
acoplamento de um navio petroleiro (shuttle), normalmente popa do navio-
cisterna, e o transbordo do leo realizado atravs de um mangote. Dependendo
do porte relativo dos dois navios, esta operao pode levar dias, perodo no qual
os navios estaro sujeitos a variaes climticas de ondas, correnteza e ventos.
Hidrodinmica I 10
O sistema composto pelos dois navios
acoplados (em tandem) pode apresentar
problema de instabilidade dinmica,
conhecido por fishtailing. O risco
inerente operao faz com que
normalmente sejam empregados
rebocadores ou, mais recentemente,
navios aliviadores dotados de sistema
de posicionamento dinmico (SPD).
Figura 5 Operao de Alvio de Sistema
FPSO
De qualquer forma, a operao de alvio envolve um risco considervel e
tem sido objeto de diversos estudos numricos e experimentais. Devido
proximidade entre os dois corpos, os efeitos de interferncia hidrodinmica entre
os dois navios desempenham um papel importante nas foras de ondas e de
correnteza e, conseqentemente, na dinmica do sistema tandem. Apenas alguns
simuladores dinmicos no mundo so capazes de considerar os efeitos de
interferncia de origem potencial (nas foras de ondas) ao longo das simulaes
de operaes de alvio e poucos possuem um modelo terico ou numrico
consolidado para o clculo das interferncias devido esteira rotacional jusante
do sistema FPSO. Este tpico um dos objetos atuais de pesquisa na rea.
Outro tema central para a engenharia ocenica atual continua sendo o
desenvolvimento de novas concepes de casco que combinem um bom
comportamento em ondas (viabilizando o emprego de risers rgidos) com outras
caractersticas que facilitem a viabilizao econmica da explorao em guas
profundas como, por exemplo, a capacidade de armazenamento do leo ou a
possibilidade de emprego de completao seca. Novas propostas de casco esto
sendo analisadas atualmente para o cenrio nacional como possibilidades
promissoras.
Hidrodinmica I 11
Figura 6 Plataforma MonoBR
Uma dessas concepes a chamada
plataforma MonoColuna, consistindo
em um casco cilndrico dotado de uma
abertura interna (moonpool) cuja
funo reduzir os movimentos de
ondas do casco. Um sistema deste
tipo foi projetado no PNV EPUSP em
parceria com a Petrobrs (projeto
MonoBR) e alia bom comportamento
em ondas, capacidade de
armazenamento de leo alm de
permitir completao seca.
O PNV participa tambm do desenvolvimento de uma nova concepo de
casco FPSO, denominado FPSOBR, que apresenta uma nova geometria e
dimenses maiores do que os FPSOs atuais, visando reduzir os movimentos de
primeira-ordem induzidos por ondas e viabilizar o emprego de risers rgidos.
Simultaneamente, novas plataformas semi-submersveis encontram-se em
construo para operao na Bacia de Campos. Em geral, a configurao atual se
baseia em quatro colunas e quatro pontoons e os cascos apresentam dimenses
avantajadas (com deslocamentos superiores a 80.000 toneladas).
Como ponto em comum, estes novos sistemas se caracterizam por um
aumento de suas dimenses principais, se comparados aos sistemas mais
antigos. Isto serve a dois propsitos interessantes: em primeiro lugar, propicia um
aumento do payload e, portanto, da capacidade de produo, o que favorece a
viabilidade econmica para sistemas em guas ultra-profundas.
Concomitantemente, permite uma elevao dos perodos naturais de movimento
de heave, roll e pitch (valores acima de 30 segundos so tpicos para estes
sistemas) e, assim, os afasta dos perodos de ondas de maior energia e garante,
por fim, menores movimentos de primeira-ordem.
Todavia, esses benefcios no se apresentam sem acarretar o
aparecimento de novos problemas. Ensaios em tanque de provas destas novas
Hidrodinmica I 12
concepes j apontam para o preocupante aparecimento de ressonncias nos
movimentos verticais induzidas por efeitos hidrodinmicos no-lineares, fato, at
ento, no observado para plataformas semi-submersveis ou sistemas FPSO
3
.
Este tipo de fenmeno pode trazer conseqncias graves, especialmente em
termos de fadiga dos risers rgidos e j constitui um novo e importante tema de
investigao.
Em resumo, atravs desta breve introduo, possvel perceber que os
desafios impostos pela explorao de petrleo e gs em guas profundas e ultra-
profundas so enormes. Vrios tpicos de pesquisa na rea de hidrodinmica
esto ainda em aberto e requerem extensos estudos tericos, numricos e
experimentais. Cada vez mais, o engenheiro que pretende atuar nesta rea
precisa aprofundar seus conhecimentos tericos e tcnicos na busca de solues
adequadas para estes problemas. O objetivo deste curso apresentar os
fundamentos de hidrodinmica necessrios para um estudo mais especfico de
diversos problemas atuais na rea de engenharia naval e ocenica. Ao longo de
todo o texto, procura-se relacionar os tpicos de estudo com as tarefas de
responsabilidade dos profissionais desta rea, descrevendo os principais
problemas reais associados a estes tpicos e orientando estudos futuros.
Breve Discusso sobre o Estado da Arte
O desenvolvimento computacional presenciado nas ltimas dcadas
possibilitou um significativo avano dos mtodos numricos para a engenharia em
geral e, hoje, o projetista conta com uma vasta gama de ferramentas numricas j
bem consolidadas. Todavia, os alunos de engenharia naval e ocenica percebem,
desde o incio do curso, que as tcnicas experimentais so ainda hoje de
fundamental importncia para a rea, tanto em se tratando do projeto de navios
como para o projeto de sistemas ocenicos. Em se tratando de hidrodinmica, o
3
Uma discusso mais aprofundada destes efeitos de 2
a
ordem apresentada no Captulo 6.
Hidrodinmica I 13
que se observa hoje uma crescente interao entre mtodos numricos e
experimentais, o que tem proporcionado processos de projeto mais expeditos e
reduzido o nmero de ensaios necessrios entre as fases de concepo e o
projeto final de um navio ou sistema ocenico.
O emprego de ferramentas numricas de computational fluid dynamics
(CFD), destinadas soluo das equaes constitutivas de escoamentos de
fluidos reais, j comum no projeto de navios para auxiliar na predio de
resistncia ao avano e propulso. Em funo principalmente dos elevados
nmeros de Reynolds que caracterizam o problema, a aplicao dessas tcnicas
, ainda hoje, limitada, e no permite excluir totalmente as avaliaes
experimentais em tanque de provas. Contudo, anlises de CFD so incorporadas
rotineiramente nas etapas preliminares de projeto para a avaliao de variaes
geomtricas nos cascos e nos apndices, eliminando assim a necessidade de um
grande nmero de modelos em escala reduzida ou do emprego de mtodos
estatsticos e suas inerentes imprecises. Ainda no tocante resistncia ao
avano, ferramentas computacionais baseadas no mtodo de elementos de
contorno (boundary-elements method, BEM) so amplamente empregadas para o
estudo do corpo de proa e da influncia do bulbo na gerao de ondas. Com isso,
possvel perceber um declnio constante nas encomendas de testes realizadas
por estaleiros nos principais tanques de provas mundiais desde a dcada de 1980.
Este declnio parcialmente compensado, por outro lado, por um aumento dos
ensaios financiados por instituies de fomento pesquisa e destinados
principalmente validao dos cdigos numricos.
Quando se trata do estudo de manobras, a aplicabilidade dos mtodos de
CFD fica ainda mais comprometida. A grande influncia de efeitos viscosos
devidos a variaes na esteira rotacional e as alteraes no campo de ondas
associadas s aceleraes do corpo no podem ser reproduzidas numericamente
com a preciso necessria. Ainda hoje, portanto, a avaliao de manobras recai
sobre mtodos semi-empricos nos quais as foras hidrodinmicas so calibradas
atravs de coeficientes experimentais obtidos em tanques de provas. Testes de
manobras com modelos em escala reduzida (empregando os chamados planar-
Hidrodinmica I 14
motion e yaw-rotating mechanisms) so realizados para a obteno de
coeficientes de foras hidrodinmicas que sero introduzidos nas equaes do
movimento do navio e permitiro uma avaliao de seu comportamento por
intermdio de simuladores dinmicos.
No que se refere ao comportamento no mar (seakeeping), os mtodos
numricos j assumem um papel crucial. Em virtude da menor influncia de efeitos
de viscosidade no escoamento, o problema normalmente pode ser tratado sob a
tica dos escoamentos potenciais, o que permite solues numricas com maior
grau de preciso. Para o projeto de navios, ensaios de comportamento no mar j
so realizados apenas para efeitos de validao do projeto final, com exceo de
alguns tipos particulares de embarcaes (caso dos navios ro-ro), para os quais
as regulamentaes da IMO (International Maritime Organization) ainda exigem
alguns estudos experimentais relativos segurana no mar. No projeto de
sistemas ocenicos, devido s maiores restries de movimentos induzidos por
ondas, os ensaios em tanque de provas ainda so parte inerente do processo de
projeto, especialmente em se tratando de novas concepes de cascos. Todavia,
o emprego de programas de BEM em etapas preliminares de projeto para a
predio das caractersticas de comportamento no mar j uma constante.
A aplicao de mtodos numricos baseados em BEM para a predio do
comportamento no mar de embarcaes com velocidade de avano apresenta um
fator complicador representado, basicamente, pela superposio do campo de
ondas estacionrio gerado pelo deslocamento da embarcao com os campos de
ondas irradiados e difratados pela mesma. Quando a velocidade de avano no
nula necessrio discretizar a superfcie-livre do fluido e a existncia de diversos
campos de ondas com comprimentos e direes de propagao diferentes
dificultam o ajuste da malha numrica e a soluo do problema. Em aplicaes
offshore, por outro lado, normalmente se trabalha com o problema de velocidade
de avano nula. Nesse caso, a soluo do problema mais simples e, nas
anlises lineares, normalmente possvel evitar a necessidade de discretizao
da superfcie-livre atravs do emprego de funes matemticas (funes de
Green) que satisfazem automaticamente a condio de contorno linearizada na
Hidrodinmica I 15
superfcie. Os mtodos baseados em BEM (normalmente referenciados como
mtodos do painis ou panel methods) podem determinar as foras e os
movimentos induzidos por ondas tanto no domnio do tempo como no domnio da
freqncia.
Desde o incio da dcada de 1980,
pacotes comerciais desenvolvidos no
MIT (programas como WAMIT, TIMIT e
HITIM) foram rapidamente aceitos pela
indstria e instituies de pesquisa e
hoje so amplamente empregados em
projetos da rea offshore. Movimentos e
foras de primeira-ordem so calculados
atravs destes programas de forma
confivel e com excelente preciso.
Figura 7 Malha numrica de plataforma S/S
gerada para emprego de software baseado
em BEM
Todavia, muitos dos problemas de interesse na rea naval e ocenica so
inerentemente no-lineares e, nestes casos, a anlise numrica se torna muito
mais complexa e custosa em termos computacionais. Deve-se ter em mente que o
processo de linearizao do problema de contorno que caracteriza as anlises de
comportamento no mar admite, como premissas bsicas, uma baixa declividade
de ondas e baixos movimentos do corpo flutuante. Assim, os movimentos de
navios ou plataformas em mares extremos certamente apresentam no-
linearidades, mas, usualmente, as mesmas podem ser negligenciadas em termos
prticos de projeto. As foras de deriva em embarcaes so um fenmeno no-
linear que tambm pode ser tratado atravs de aproximaes com base nos
resultados de anlises lineares sem maiores conseqncias na maioria dos casos.
Alguns problemas mais especficos, entretanto, requerem necessariamente um
tratamento no-linear. Na rea naval, um exemplo clssico o problema de
resistncia adicional em ondas (added resistance in waves), causada na maior
parte por perturbaes causadas no fluido devido ao movimento do navio em
ondas. Em virtude destas perturbaes, a resistncia ao avano do navio ser
maior em ondas do que em guas calmas. Trata-se de um efeito de segunda-
Hidrodinmica I 16
ordem proporcional ao quadrado das amplitudes de movimentos do navio.
Exemplos de problemas na rea offshore que exigem um tratamento no-linear
incluem a predio de air-gap em plataformas semi-submersveis, o problema de
wave runup em colunas de plataformas e cascos de navios (e conseqentemente,
a predio de gua no convs ou greenwater). Nestes casos, os efeitos no-
lineares so fundamentais para uma correta avaliao do problema em situaes
extremas de ondas, uma vez que os mesmos so tanto maiores quanto maior for a
declividade das ondas (wave steepness). Pode-se mencionar ainda os efeitos de
springing (foras verticais de segunda-ordem em alta freqncia) e ringging
(foras causadas pelo impacto de ondas de alta declividade sobre o casco) que
excitam os tendes de plataformas TLPs. Problemas de excitao de movimentos
ressonantes por foras de segunda-ordem de baixa freqncia so usuais em
plataformas do tipo SPAR (slow-pitch e/ou slow-roll) e, atualmente, comearam a
ser observados tambm em plataformas semi-submersveis e at mesmo em
sistemas FPSOs em razo do aumento de suas dimenses e perodos naturais de
oscilao.
Via de regra, para o tratamento dos problemas mencionados acima, uma
anlise numrica racional ainda no vivel como parte da metodologia de
projeto, quer seja pela no consolidao ou validao dos mtodos ou em funo
dos elevados custos computacionais. Assim, em muito dependem, ainda hoje, de
anlises experimentais e do emprego de modelos semi-empricos ou abordagens
estatsticas. No que se refere ao comportamento no mar de navios ou plataformas
ocenicas, a modelagem analtica ou numrica destes problemas no-lineares
constitui, atualmente, um dos principais focos de pesquisa e desenvolvimento na
rea hidrodinmica.
A Bibliografia Bsica do Curso
A bibliografia referenciada ao longo deste texto extensa e compreende
desde livros indicados para um acompanhamento geral do curso at trabalhos que
Hidrodinmica I 17
abordam problemas especficos com elevado grau de profundidade. Nesta seo,
pretende-se discutir os primeiros, atravs de uma reviso sucinta dos principais
textos que devem ser adotados pelos alunos como um complemento fundamental
aos estudos.
Faltinsen (1990) apresenta uma viso geral do estado da arte na rea de
hidrodinmica de navios e sistemas ocenicos e discute alguns dos principais
problemas enfrentados atualmente neste campo. O livro apresenta uma viso
geral dos modelos tericos e das tcnicas experimentais e numricas usualmente
adotadas no tratamento destes problemas. No h uma abordagem aprofundada
em cada tpico, mas o livro bastante completo e apresenta uma excelente
coleo de referncias para estudos suplementares, o que o torna uma boa opo
para uma primeira leitura.
Bertram (2000) trata exclusivamente da hidrodinmica de navios. Por ser
um livro recente, uma boa referncia para um primeiro contato com os mtodos
numricos empregados atualmente para o estudo de resistncia ao avano,
propulsores, comportamento no mar e manobras.
Uma excelente apresentao da teoria linear de ondas de gravidade e da
modelagem terica de comportamento no mar de sistemas ocenicos pode ser
encontrada em Newman (1977), texto j clssico em hidrodinmica martima. O
enfoque apresentado eminentemente terico e requer um conhecimento bsico
prvio de mecnica dos fluidos e clculo. uma leitura fortemente recomendada
para o acompanhamento do curso.
Massel (1996) discute tpicos mais especficos da teoria de ondas do mar
com maior profundidade, como, por exemplo, aspectos da teoria de gerao de
ondas e abordagem estatstica das ondas do mar (espectros de energia). Uma
outra boa opo para um estudo mais profundo da teoria de ondas o livro de Mei
(1989).
Price & Bishop (1974), outro livro j clssico em hidrodinmica martima, d
um enfoque probabilstico modelagem das ondas e do comportamento no mar.
J Chakrabarti (1994) discute exclusivamente tcnicas experimentais empregadas
para diversos fins no contexto de hidrodinmica martima e representa a principal
Hidrodinmica I 18
fonte complementar para as discusses referentes a ensaios em tanques de
provas com modelos em escala reduzida.
Por fim, completando o rol de referncias fundamentais, o livro editado por
Okhusu (1996) uma fonte recomendada para um melhor entendimento do
estado da arte em hidrodinmica martima e os principais tpicos de pesquisa
atuais na rea. Discute as tcnicas atualmente empregadas para o tratamento de
diferentes problemas como, por exemplo, o emprego de CFD para o escoamento
no entorno de navios, a modelagem numrica do comportamento de navios em
ondas e hidrodinmica de alta velocidade, propulsores e impacto hidrodinmico.
Hidrodinmica I 19
2. FUNDAMENTOS DE MECNICA DOS FLUIDOS
Todos os homens tendem por natureza a saber.
Aristteles (Metafsica)
Um primeiro objetivo deste captulo rever alguns conceitos bsicos de
mecnica dos fluidos que permitiro recordar as hipteses fundamentais por trs
do estudo do escoamento de fluidos ideais. O entendimento destas hipteses e
suas implicaes necessrio para se divisar com exatido as vantagens obtidas
em termos de complexidade matemtica do problema e, principalmente, as
limitaes desta abordagem. Assim, a seo 2.1 trar uma reviso das equaes
de movimento que descrevem a dinmica de um fluido. Uma vez que todos os
conceitos e a formulao apresentados j foram discutidos ao longo do curso de
graduao, no haver a preocupao em se deter nos pormenores das dedues
matemticas, devendo o aluno recorrer, para isto, aos textos bsicos de mecnica
dos fluidos ou mecnica dos meios contnuos. Alm disso, no se pretende
simplesmente reproduzir uma srie de equaes que j foram vistas e revistas ao
longo do curso de graduao, o que tornaria a leitura, no mnimo, desinteressante.
Tirando proveito do fato que os conceitos fundamentais por trs da formulao j
foram (ou deveriam ter sido) absorvidos pelo aluno, procura-se, ento, rever os
conceitos fundamentais sob uma perspectiva histrica e, at certo ponto,
cronolgica. Esta abordagem pode no ser a melhor do ponto de vista didtico,
mas (espero eu), torna a recordao mais instingante.
J a seo 2.2 tratar exclusivamente da teoria de escoamentos potenciais.
A inteno aqui ser a de estender os conceitos apresentados na graduao
atravs de uma discusso de aspectos matemticos fundamentais para uma maior
compreenso da abordagem empregada no equacionamento e das tcnicas
existentes para a soluo de diferentes problemas envolvendo escoamentos
Hidrodinmica I 20
potenciais, dentre eles o problema de comportamento no mar, que ser
apresentado mais adiante.
Por fim, deve-se mencionar que a notao seguida ao longo do texto segue
de perto aquela introduzida nas apostilas de PNV2340 (Mecnica dos Meios
Contnuos) e PNV2441 (Mtodos Numricos para Engenharia I).
2.1. As Equaes Constitutivas da Dinmica dos Fluidos: uma perspectiva
histrica
As evidncias da existncia de frico nos fluidos foram levantadas muito
antes dos estudos de Sir Isaac Newton (1642-1727)
4
, mas coube a Newton
formular, de maneira indita, uma lei que descrevesse a interdependncia entre as
tenses de cisalhamento entre diferentes camadas do fluido e os parmetros que
caracterizam o movimento das mesmas. Em seu Philosophiae naturalis principia
(1687), Newton escreveu que se uma poro de um corpo fluido mantida em
movimento, este movimento gradualmente se comunica ao restante do fluido.
Esses feitos, j observados muito antes de seu nascimento, foram atribudos por
ele a um defectus lubricitatis, ou seja, um defeito de lubrificao ou uma frico
interna ou, finalmente, viscosidade.
Newton postulou uma lei para a frico em um fluido atravs do seguinte
modelo: Considere-se duas placas paralelas, cada qual com uma rea unitria,
separadas por uma regio fluida preenchendo a distncia y, como representado
na figura abaixo:
4
Para uma descrio mais detalhada sugere-se a leitura de Tokaty (1994).
Hidrodinmica I 21
V
V
y
V
V
V
V
y
Figura 8 Modelo de Frico de Newton
Se a placa superior posta em movimento com uma velocidade V com
respeito placa inferior, ento o perfil de velocidades no fluido entre as placas
linear e a fora necessria para manter o movimento proporcional a:
y
V
= ou
dy
dV
= (2.1)
onde:
: coeficiente de viscosidade dinmica do fluido ( ) s m kg . ;
: fora de cisalhamento por unidade de rea ou tenso de cisalhamento
(N/m
2
)
A equao (2.1), de fato, funciona bem para escoamentos com baixos
nmeros de Reynolds (elevadas viscosidades e/ou baixas velocidades), em geral,
at Re=2000.
Aps os trabalhos de Newton, a Mecnica dos Fluidos ganhou grande
impulso em termos de sua modelagem matemtica, especialmente atravs dos
estudos dos iluministas. No entanto, 150 anos se passariam aps a lei postulada
por Newton para que a viscosidade do fluido fosse, finalmente, integrada s
equaes gerais do movimento dos fluidos.
Antes que isso acontecesse, ver-se-ia surgir a descrio matemtica que
descreve os movimentos dos fluidos atravs do equacionamento que hoje nos
Hidrodinmica I 22
familiar e que, ao ignorar a influncia da viscosidade, forma a base do que hoje
conhecemos como dinmica dos fluidos ideais.
Leonhard Euler (1707-83)
5
, de forma indita, empregou de forma
sistemtica e organizada conceitos de clculo diferencial e integral ao estudo da
dinmica de meios contnuos e, dessa forma, deduziu um conjunto de equaes
que lhe rende o ttulo de fundador da rea que hoje conhecemos como Mecnica
dos Fluidos. Somente a partir dos trabalhos deste grande matemtico, a dinmica
dos escoamentos passou a ser estudada atravs de uma modelagem matemtica
estruturada. Em 1755, Euler aplicou os conceitos da segunda lei de Newton ao
problema de escoamento de um fluido. Para fluidos incompressveis (=cte), o
conjunto de equaes diferenciais que representa as equaes de movimento
propostas por Euler e que leva seu nome dado por:
z
z
z
z
y
z
x
z z
y
y
z
y
y
y
x
y y
x
x
z
x
y
x
x
x x
g
z
p
z
v
v
y
v
v
x
v
v
t
v
Dt
Dv
g
y
p
z
v
v
y
v
v
x
v
v
t
v
Dt
Dv
g
x
p
z
v
v
y
v
v
x
v
v
t
v
Dt
Dv
1
1
1
(2.2)
na qual o campo vetorial k t x v j t x v i t x v t x v
z y x
r
r
r
r
r
r r r
) , ( ) , ( ) , ( ) , ( + + = representa o campo
de velocidades do fluido e, em conjunto campo escalar ) , ( t x p
r
que representa o
campo de presses no escoamento, definem o conjunto de 4 incgnitas a serem
determinadas como soluo do problema matemtico.
Em sua forma vetorial, a equao de Euler pode ser escrita de forma mais
compacta:
5
Euler, Leonhard (1707-83): brilhante matemtico suo, gerou contribuies fundamentais para
diversos ramos da matemtica e suas aplicaes: equaes diferenciais, sries infinitas, clculo de
variaes, funes analticas, mecnica e hidrodinmica. Foi um dos nomes de maior destaque na
cincia durante o sculo XVIII.
Hidrodinmica I 23
g p v v
t
v r r r
r
= +
1
) ( (2.3)
No conjunto de equaes (2.2), representa a densidade (ou massa
especfica) do fluido. Percebe-se, assim, que o conjunto de foras sugerido por
Newton e expresso em (2.1) tambm no se encontra incorporado s Equaes
de Euler. As equaes de Euler representam, portanto, as equaes de
movimento de escoamentos do que hoje conhecemos como fluidos ideais
(incompressveis e inviscidos).
Euler introduziu, tambm, o conceito de linhas de corrente (streamlines),
definindo-as como o conjunto de curvas (imaginrias) tangentes em cada ponto ao
vetor velocidade do escoamento. Se uma destas curvas descrita
parametricamente por em um instante de tempo t qualquer, ento as
linhas de corrente so as solues de:
) , ( t s x x
r r
=
) , ( t x v
ds
x d r r
r
=
em um instante de tempo fixo t. Em um sistema de coordenadas cartesianas, esta
equao vetorial d origem a trs equaes escalares:
z y x
v
ds
dz
v
ds
dy
v
ds
dx
= = = ; ;
ou, de maneira equivalente:
z y x
v
dz
v
dy
v
dx
= = (2.4)
Obs: As linhas de corrente no devem ser confundidas com as trajetrias (paths)
descritas pelas partculas fluidas e representadas por:
) , ( t x v
dt
x d r r
r
=
e, portanto, as linhas de corrente coincidem com as trajetrias das partculas, em
geral, apenas para o caso de escoamento permanente.
Hidrodinmica I 24
Outra inestimvel contribuio de Euler foi a deduo da equao
diferencial da continuidade, que expressa a conservao de massa na forma:
0
) (
) (
) (
=
z
v
y
v
x
v
t
z
y
x
(2.5)
e que, sob a hiptese de fluido incompressvel e homogneo se reduz
simplesmente a:
0 =
= =
z
v
y
v
x
v
v v div
z
y
x
r r
(2.6)
Dessa forma, tem-se um conjunto de quatro equaes formado por (2.2) e
(2.6) que permite obter as quatro incgnitas procuradas, as quais, uma vez
determinadas, caracterizam qualquer escoamento de fluido ideal.
Euler, assim, abriu um novo campo para o estudo de escoamentos fluidos,
at ento de carter eminentemente emprico. Como escreveu Lagrange
6
,
atravs das descobertas de Euler, toda a mecnica dos fluidos foi reduzida a um
problema de clculo e, se as equaes algum dia se mostrarem integrveis, as
caractersticas do escoamento e o comportamento de um fluido sob a ao de
foras estaro determinados para todas as circunstncias. Na verdade, hoje
percebemos um certo exagero na constatao de Lagrange, mas inegvel que o
trabalho de Euler forneceu as bases para avanos posteriores, como a
incorporao dos efeitos de viscosidade.
De fato, Lagrange chegou concluso que as Equaes de Euler poderiam
ser resolvidas apenas em duas condies especficas: escoamentos irrotacionais
6
Lagrange, Joseph Louis (1716-1813): nascido na Itlia, desenvolveu seus trabalhos mais
importantes na Frana e revolucionou o estudo da mecnica. Foi um dos fundadores do clculo
variacional, posteriormente expandido por Wierstrass, e introduziu os princpios analticos no
estudo da mecnica e fluido-dinmica.
Hidrodinmica I 25
( 0
r
r r
= = v v rot ) ou escoamentos rotacionais, mas permanentes. O primeiro caso
levou definio do potencial de velocidades ) , ( t x
r
, uma funo escalar com a
seguinte propriedade: ) , ( ) , ( t x t x v
r r r
= .
Observando a equao de Euler (2.3) e lembrando a identidade (verificar
como exerccio):
) ( ) (
2
1
) ( v v v v v v
r r r r r r
=
pode-se escrever:
) (
2
1
2
v v
p
v
t
v r r
r
=
+ + +
onde j se adotou a hiptese de que as foras de campo so exclusivamente
conservativas e, portanto, podem ser escritas por um potencial de fora (se as
nicas foras atuantes forem gravitacionais e k g g
r
r
= , ento ) (gz = ).
Mas, se o escoamento for potencial ( ) , ( ) , ( t x t x v
r r r
= ), ento,
necessariamente (demonstrar): 0
r
r r
= = v v rot
e a equao de Euler se reduz a:
0
2
1
2
r
=
+ + +
p
v
t
e, Lagrange ento deduziu que (e esta a conhecida integral da equao de Euler
proposta por Lagrange para escoamentos irrotacionais de fluido incompressvel):
) (
2
1
2
t C
p
v
t
= + + +
(2.7)
No caso particular de escoamento irrotacional e permanente 0 = t e,
portanto:
C
p
v = + +
2
2
1
(2.8)
Hidrodinmica I 26
As equaes (2.7) e (2.8) so duas formas da conhecida equao atribuda
a Daniel Bernoulli
7
, deduzidas para o caso particular de escoamento irrotacional.
Bernoulli, contemporneo de Euler, realizou uma srie de estudos sobre
escoamentos de fluidos. Foi o responsvel pelo primeiro texto didtico em
mecnica dos fluidos, seu Hydrodynamica (1738), no qual relaciona, de forma
indita, o campo de presses ao campo de velocidades. interessante notar,
todavia, que as relaes deduzidas por Bernoulli, no entanto, apresentam uma
forma diferente daquela expressa na equao que carrega seu nome, obtida
mediante a integral de Lagrange das Equaes de Euler.
Deve-se notar tambm, que as equaes de Bernoulli tambm so vlidas
para o segundo caso previsto por Lagrange, o caso de escoamentos permanentes
e rotacionais, embora, neste caso, sua aplicao seja restrita s linhas de corrente
do escoamento. De fato, retomemos a equao:
) (
2
1
2
v v
p
v
t
v r r
r
=
+ + +
Uma vez que o escoamento permanente 0 = t v
r
e, portanto:
) (
2
1
2
v v
p
v
r r
=
+ +
Sabe-se que um vetor perpendicular superfcie f(x)=cte, e, assim, o
vetor deve ser perpendicular s superfcies nas quais:
f
) ( v v
r r
C
p
v = + +
2
2
1
(2.9)
Mas, ) ( v v
r r
perpendicular tanto a v
r
como a v
r
. Dessa forma, as
superfcies nas quais a equao (2.9) se aplica so as superfcies que contm os
vetores e . Um conjunto de linhas que satisfaz esta propriedade o
conjunto de linhas de corrente do escoamento. Assim, embora as equaes (2.8)
e (2.9) sejam matematicamente idnticas, no caso de escoamentos permanentes
v
r
v
r
7
Bernoulli, Daniel (1700-82): Nascido na Holanda, membro de uma famosa famlia sua da qual
vrios se destacaram como importantes matemticos, conhecido por seus trabalhos em
mecnica dos fluidos e teoria cintica dos gases. Tambm trabalhou em astronomia e magnetismo.
Hidrodinmica I 27
rotacionais, (2.9) se aplica apenas ao longo de uma linha de corrente. Valores
diferentes da constante C so atribudos s diferentes linhas de corrente. J no
caso de escoamentos irrotacionais (permanentes ou no) a equao de Bernoulli
(na forma (2.8) ou (2.7)) se aplica indistintamente entre quaisquer pontos no
domnio do fluido.
Ao longo do sculo XVIII, a fluido-mecnica se desenvolvia rapidamente.
Vrios pesquisadores trabalhavam em diversos problemas prticos de
escoamentos fluidos, sobre o novo ferramental proporcionado pelo clculo
diferencial e integral. Dentre estes trabalhos, merece destaque, por exemplo, o
estudo realizado por DAlembert
8
sobre a resistncia oferecida por um fluido a
corpos que se deslocam atravs do mesmo. Em sua obra Essai dune nouvelle
theorie de la resistance des fluides (1752), DAlembert introduziu o importante
conceito de ponto de estagnao e chegou perturbadora concluso de que a
teoria indicava que a resistncia total oferecida pelo fluido seria nula (o conhecido
Paradoxo de DAlembert).
Estudos experimentais tambm proliferavam, como os trabalhos realizados
por Chevalier de Borda (1733-99). Borda estudou os efeitos de constrio do fluxo
atravs de tubos e tambm soou um alarme quanto ao fato que os resultados nem
sempre pareciam em harmonia com as leis formuladas por Bernoulli e Lagrange,
pois, explica, quando um escoamento encontra uma expanso sbita (de rea),
ele perturbado de tal maneira que acaba perdendo parte de sua energia cintica,
ou sua living force. Na verdade, as observaes de Borda se relacionam com a
separao da camada-limite e turbulncia, conceitos que somente seriam
entendidos anos depois.
Ficava cada vez mais claro, portanto, que a mecnica dos fluidos carecia
de uma formulao mais geral. O prximo salto qualitativo viria com a publicao
8
DAlembert, Jean le Rond (1717-83): Matemtico francs desenvolveu diversos trabalhos em
mecnica geral e mecnica dos corpos celestes, alm de fazer importantes contribuies teoria
de equaes diferenciais a derivadas parciais.
Hidrodinmica I 28
do trabalho de Claude Louis Navier
9
que, unindo a hiptese de frico de Newton
a observaes experimentais, incluiu, de forma indita, as foras de cisalhamento
oriundas da ao da viscosidade do fluido, complementando as equaes
originalmente propostas por Euler:
g v p v v
t
v r r r r
r
+ + =
) ( (2.10)
ou, na forma escalar:
z
z z z z
z
z
y
z
x
z
y
y y y y
z
y
y
y
x
y
x
x x x x
z
x
y
x
x
x
g
z
v
y
v
x
v
z
p
z
v
v
y
v
v
x
v
v
t
v
g
z
v
y
v
x
v
y
p
z
v
v
y
v
v
x
v
v
t
v
g
z
v
y
v
x
v
x
p
z
v
v
y
v
v
x
v
v
t
v
+
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
1
1
1
(2.11)
As equaes acima so conhecidas como Equaes de Navier-Stokes
10
.
No conjunto de equaes (2.10) e (2.11), representa a chamada
constante de viscosidade dinmica ( = o coeficiente de viscosidade
cinemtica). O termo entre parnteses no lado esquerdo da equao corresponde
ao campo de aceleraes do fluido definido segundo a representao Euleriana do
escoamento. O termo ) ( v gradp
r
+ o prprio divergente do chamado Tensor
de Tenses sob a hiptese de fluido newtoniano e engloba todas as chamadas
foras de superfcie (foras de presso e tenses de cisalhamento) atuantes sobre
as partculas fluidas. Lembramos que o operador nabla dado por:
9
Navier, Claude Louis Marie Henri (1785-1836): Matemtico francs que realizou diversos
trabalhos na rea de mecnica. mais conhecido por suas equaes de movimento de fluidos
que, de forma indita, incluram efeitos de viscosidade.
10
Em um trabalho apresentado Academie de Sciences, em Paris, em 18 de maro de 1822,
Navier apresentou, pela primeira vez, sua teoria, cujas equaes seriam publicadas anos depois.
Em uma forma diferente, as mesmas equaes foram obtidas por Sir George Gabriel Stokes (1819-
1903), fsico-matemtico britnico, em um trabalho datado de 1845.
Hidrodinmica I 29
2
2
2
2
2
2
2
(.) (.) (.)
(.) (.)
z y x
= =
Deve-se observar que aproximadamente 150 anos se passaram entre a Lei
de frico de Newton e a incorporao dos efeitos de viscosidade nas equaes
de movimento do fluido. A partir dos trabalhos de Navier, uma nova perspectiva se
abriu na rea de mecnica dos fluidos: o estudo dos chamados fluidos reais.
Quanto ao escopo deste curso, focado para o estudo de ondas de
gravidade e para o problema de comportamento no mar, no entanto, normalmente
os efeitos de viscosidade so pequenos o suficiente para que possamos
consider-los desprezveis ou, alternativamente, propormos correes externas
simplificadas que, de certa forma, os incorporem quando necessrio. Assim, o
arcabouo matemtico no qual nos basearemos corresponde, em sua maior parte,
ao estudo de fluidos ideais e, em especial, ao problema de escoamentos
potenciais, aos quais daremos maior ateno no restante deste captulo.
2.2. Escoamentos Irrotacionais: Teoria do Potencial
Apesar de suas bvias limitaes, o estudo de escoamentos potenciais
de suma importncia na mecnica dos fluidos e, em particular, em hidrodinmica
martima. A teoria do potencial constitui a base sobre a qual se fundamenta a
Teoria de Ondas de Gravidade e, portanto, o estudo do comportamento no mar,
como veremos nos prximos captulos.
Trataremos aqui de escoamentos de fluidos ideais (contnuos,
incompressveis, homogneos e inviscidos) e irrotacionais, hipteses que, do
ponto de vista matemtico, introduzem grandes simplificaes, como foi possvel
perceber nas discusses realizadas anteriormente. Neste contexto, veremos que a
equao da continuidade expressa pela equao de Laplace. As equaes do
movimento do fluido, que incorporam a dinmica do escoamento, se reduzem s
equaes de Bernoulli (2.7) ou (2.8).
Hidrodinmica I 30
No curso de mecnica dos meios contnuos, uma introduo ao problema
de escoamento potencial ao redor de corpos submersos foi apresentada. Vimos
que a hiptese bsica para que a hiptese de escoamento potencial seja
assumida que a camada-limite seja fina, comparada com as dimenses
caractersticas do corpo, o que implica, por sua vez, em altos nmeros de
Reynolds (Re). Em outras palavras, as foras que regem a dinmica do
escoamento devem ser preponderantemente de origem inercial.
O objetivo, no restante deste captulo fazer uma breve reviso dos
conceitos fundamentais e, por vezes, recuperar tais conceitos atravs de uma
demonstrao matemtica mais rigorosa. Lembremo-nos de Lagrange, ao
observar que, se a teoria em construo se mostrasse vlida, todo o problema da
dinmica dos fluidos se reduziria a um problema de clculo. Lagrange queria dizer,
de fato, que esperava que se houvesse ultrapassado a barreira da modelagem
matemtica do fenmeno fsico. Dois sculos aps a observao de Lagrange,
muitos modelos matemticos j se encontram bem estabelecidos na rea de
hidrodinmica. Por vezes, esses modelos requerem o conhecimento de tpicos
avanados de matemtica. Inegavelmente, um bom hidrodinamicista deve,
necessariamente, aliar a percepo do fenmeno fsico a um vasto ferramental
matemtico. Para o engenheiro que pretende se especializar na rea de
hidrodinmica, o estudo de diferentes tpicos de matemtica (equaes
diferenciais a derivadas parciais, teoria de funes a variveis complexas, entre
outros) deve ser encarado como condio sine qua non. Em suma, o que se
pretende dizer com essa pequena digresso : percamos o medo...
2.2.1. Irrotacionalidade e o Potencial de Velocidades
Vimos que as equaes constitutivas do movimento de fluidos ideais so as
equaes de Euler (2.2) e a equao da continuidade (2.6). Vamos, aqui, discorrer
um pouco mais sobre a definio do chamado potencial de velocidades e as
simplificaes matemticas decorrentes da hiptese de escoamento irrotacional.
Hidrodinmica I 31
Definimos circulao em torno de uma curva fechada c
t
(contorno material)
como sendo:
(2.12)
=
t
c
r d t x v
r r r
). , (
O teorema de Kelvin (da conservao da circulao) afirma que em um
fluido ideal, sob ao de foras exclusivamente conservativas, a circulao em
torno de qualquer contorno material que se desloca com o fluido permanece
constante
11
, ou seja:
0 ). , ( = =
t
c
r d t x v
dt
d
dt
d r r r
(2.13)
O significado fsico deste teorema pode ser entendido pelo fato de, na
ausncia de efeitos de viscosidade e, portanto, de tenses de cisalhamento, no
haver foras capazes de alterar a taxa de rotao das partculas fluidas.
De acordo com (2.13), a circulao em um escoamento de fluido ideal
constante com o tempo. Podemos considerar, ento, sem perda de generalidade,
que o fluido tenha partido do repouso em algum instante de tempo passado e que,
portanto, =0 para qualquer instante de tempo e qualquer contorno material
definido no escoamento.
Por outro lado, o teorema de Stokes para um campo vetorial contnuo e
diferencivel relaciona o conceito de circulao com o conceito de vorticidade do
campo vetorial, na forma:
(2.14)
=
S S
r d v dS n v rot
r r r r
. .
onde S a superfcie limitada pelo contorno fechado S . O lado esquerdo da
equao (2.14) representa a vorticidade (em ingls, vorticity), enquanto o lado
direito , por definio, a circulao, que deve ser nula para qualquer contorno
11
A demonstrao deste teorema pode ser encontrada, por exemplo, em Newman (1977), pgs.
103 e 104.
Hidrodinmica I 32
material. Assim, a vorticidade deve se anular para qualquer superfcie S definida
no domnio do fluido e, portanto
12
:
0
r
r r
= = v v rot
ou seja, o escoamento que conserva circulao deve ser, necessariamente,
irrotacional. Esta concluso extremamente importante, pois possvel
demonstrar que um campo vetorial para o qual o rotacional identicamente nulo
pode ser representado como o gradiente de um campo escalar. Esta afirmao,
por sua vez, decorre do teorema de Helmholtz, teorema fundamental do clculo
vetorial (a demonstrao deste teorema pode ser encontrada, por exemplo, em
Wills (1958), pg. 121). Seja um campo vetorial finito e contnuo. O teorema de
Helmholtz afirma que esse campo vetorial pode ser decomposto em um campo
gradiente (cujo rotacional nulo) e um campo solenoidal (cuja divergncia nula),
na forma
F
r
13
:
A F
r r
+ =
onde uma funo escalar e A
r
um campo vetorial cuja divergncia nula. A
definio do campo vetorial A
r
mostra que esse campo sempre poder ser
considerado identicamente nulo se 0
r r
= F
14
.
Decorre do teorema de Helmholtz, portanto, que o campo de velocidades
de um escoamento irrotacional pode ser descrito atravs do gradiente de
uma funo escalar
) , ( t x v
r r
) , ( t x
r
, denominada potencial de velocidades:
) , ( ) , ( t x t x v
r r r
=
12
importante observar que nem sempre conseguimos aplicar o teorema de Stokes, podendo
causar certa confuso. Isso ocorre, por exemplo, em problemas planos de escoamento potencial
em torno de corpos submersos. Qualquer contorno material que envolva o corpo no permite a
aplicao do teorema, pois a superfcie interior no ser definida exclusivamente por este contorno
(trata-se de um domnio que no simplesmente conexo).
13
Uma importante conseqncia deste teorema o fato de que o campo vetorial F
r
estar
completamente determinado uma vez conhecidas a sua divergncia e o seu rotacional.
14
Observar que ) ( ) ( A A
r r
= +
Hidrodinmica I 33
Obviamente, o potencial de velocidades uma abstrao. Sua introduo,
contudo, permite uma grande simplificao matemtica, uma vez que as trs
componentes do vetor velocidade podem ser derivadas a partir de uma nica
funo escalar. De fato, a equao da continuidade (2.6) para escoamentos
potenciais resulta, simplesmente:
0 ) (
2
2
2
2
2
2
= =
= =
z y x
v div
r
(2.15)
que a conhecida equao de Laplace. Assim, em um escoamento potencial, o
campo de velocidades (e, portanto, de aceleraes) decorre exclusivamente da
condio de conservao de massa. A soluo da equao de Laplace (que
uma equao diferencial linear de segunda-ordem a derivadas parciais) fornece
diretamente o potencial de velocidades e, dessa forma, o campo de velocidades
do escoamento. A incgnita restante, o campo de presses, ento obtido atravs
da equao de Bernoulli (2.7). O problema matemtico se reduz, ento, a um
problema de duas equaes e duas incgnitas ( ) , ( t x
r
e ) , ( t x p
r
).
2.2.2. O Problema de Contorno
A equao de Laplace representa a forma mais simples de uma classe de
equaes diferenciais de segunda-ordem conhecidas como equaes elpticas
15
.
Aparece em muitos ramos da fsica-matemtica e muitas caractersticas
pertinentes s funes que a satisfazem (normalmente referenciadas como
funes harmnicas) so conhecidas. Sabe-se, por exemplo, que estas funes e
suas derivadas espaciais so finitas e contnuas, exceto pela possibilidade de
singularidades nas fronteiras do domnio.
A distino entre diferentes tipos de escoamento resulta das condies
impostas nestas fronteiras, as chamadas condies de contorno. Nos problemas
15
Uma discusso quanto classificao das equaes a derivadas parciais de segunda-ordem e
sobre as diferentes aplicaes da Equao de Laplace pode ser encontrada, por exemplo, em
Sobolev (1989).
Hidrodinmica I 34
de mecnica dos fluidos, estas podem representar condies cinemticas
(relativas s velocidades do fluido na fronteira) ou dinmicas (condio sobre as
foras).
Um dos problemas de interesse mais simples corresponde ao caso de um
escoamento uniforme sobre um corpo rgido fixo, com superfcie designada por S
B
,
em um fluido sem fronteiras. O problema esquematizado na figura abaixo.
x
y
U
z
S
B
n
x
y
U
z
S
B
x
y
U
z
S
B
nn
Figura 9 Escoamento Uniforme sobre Corpo Fixo
Sabemos que, por se tratar de um escoamento irrotacional, a condio
cinemtica apropriada na fronteira do corpo a condio de impermeabilidade,
uma vez que a condio de no-escorregamento necessariamente implicaria em
rotacionalidade do escoamento. Neste problema, uma segunda condio se impe
em uma fronteira definida a uma distncia suficientemente distante do corpo e que
implica que a perturbao causada pela presena do corpo deve,
necessariamente, tender a zero medida que nos afastamos do corpo. A esta
condio, d-se o nome de condio de evanescncia.
Dessa forma, o problema de contorno pode ser equacionado: Determinar o
potencial de velocidades , tal que:
i U
n
n
x
S
S
B
B
r
r
=
=
=
=
lim
; 0
0
(2.16)
Hidrodinmica I 35
Uma questo que naturalmente se coloca neste ponto diz respeito
unicidade das solues dos problemas de contorno. Na realidade, trivial
demonstrar que, se a regio ocupada pelo fluido simplesmente-conexa, a
soluo, de fato, ser univocamente determinada, a menos de uma constante.
Para demonstrar este fato, suponhamos que o problema acima admitisse duas
solues distintas ) (
1
x
r
e ) (
2
x
r
. Ento ) ( ) ( ) (
2 1
x x x
r r r
= dever satisfazer:
0 lim
; 0
0
r
r
=
=
=
x
S
B
n
O domnio do fluido est compreendido pela fronteira S (por exemplo, no
caso acima, representada pela unio do contorno do corpo com uma superfcie
definida no infinito). Observando que:
0 ) ( ) ( = =
dS n dS n
S S
r r
e aplicando o teorema da divergncia:
[ ] 0 ) ( ) ( = + = =
dV dV div dS n
V V S
r
16
Como 0 = , chega-se, finalmente, a:
0 ) ( ) (
2
= =
V V
dV dV
de onde decorre que 0 ou cte = e, portanto, as solues do problema de
escoamento potencial esto univocamente definidas, a menos de uma constante.
Todavia, importante ressaltar que a prova de unicidade apresentada
acima pressupe que o domnio fluido seja simplesmente conexo
17
(premissa do
teorema da divergncia) e que a posio das fronteiras seja conhecida a priori. No
16
A segunda passagem nesta deduo corresponde forma geral da conhecida frmula de
integrao por partes e pode ser demonstrada facilmente. Esta demonstrao fica como exerccio.
17
Um caso evidente para o qual o domnio fluido no ser simplesmente-conexo se refere ao
problema bidimensional de escoamento em torno de um corpo rgido.
Hidrodinmica I 36
entanto, haver casos em que a posio e a velocidade na fronteira no sero
conhecidas a priori. o caso, por exemplo, do problema de escoamento induzido
por ondas na superfcie-livre do fluido, pois a forma da onda e, portanto, a
elevao da superfcie, no estaro previamente determinadas. Sero, ao
contrrio, conseqncia da soluo do problema de contorno. Nesse caso,
informaes adicionais sero necessrias e sero providenciadas atravs de uma
condio dinmica na superfcie, a qual impe que a presso na superfcie seja
igual presso atmosfrica.
2.2.3. Aspectos Importantes da Soluo do Problema de Contorno
No curso de Mecnica dos Meios Contnuos (PNV2340) vimos algumas
solues analticas para problemas de escoamento potencial ao redor de corpos
de geometrias simples, como cilindros circulares. Posteriormente, na disciplina de
Mtodos Computacionais (PNV2441), estendemos as possibilidades de soluo
atravs de tcnicas numricas que permitem resolver o problema para corpos de
geometria arbitrria. Vimos, em particular, que as perturbaes causadas por um
corpo imerso em um escoamento originalmente uniforme acabavam por requerer a
introduo de singularidades matemticas, a mais simples das quais representada
por uma fonte ou sorvedouro.
Nos cursos de graduao, a introduo destas singularidades foi
apresentada de forma ad hoc. Assim, por exemplo, vimos que a soluo analtica
do problema de escoamento bidimensional em torno de um cilindro circular
obtida pela superposio do potencial de velocidades do escoamento uniforme e o
potencial de um dipolo situado no centro do cilindro. Na realidade, o dipolo uma
singularidade que pode ser definida matematicamente pela combinao de uma
fonte e um sorvedouro, quando a distncia entre as duas singularidades tende a
zero
18
. As tcnicas numricas estudadas em PNV2441 se baseavam em duas
abordagens distintas, o mtodo das fontes e o mtodo de Green, e, em ambos os
18
Para a definio precisa, consultar Newman (1977), pg. 114.
Hidrodinmica I 37
casos, o potencial de velocidades das fontes/sorvedouros tambm eram parte
inerente da soluo.
No nos interessa, aqui, reproduzir novamente as solues analticas j
discutidas na graduao, embora uma recordao por parte do aluno seja
importante neste momento. Para tanto, o aluno pode recorrer a bons livros de
mecnica dos fluidos (como sugesto, Batchelor (1967)) e de hidrodinmica (por
exemplo, Newman (1977)), alm das apostilas dos cursos supra-citados.
Nossa inteno, no restante desta seo, ser o de analisar aspectos
matemticos da soluo de problemas de contorno governados pela equao de
Laplace com o objetivo de melhor fundamentar as tcnicas anteriormente
apresentadas e tentar identificar a razo da aparente onipresena destas
singularidades.
Uma funo de Green uma funo que representa a soluo de uma
equao diferencial no-homognea. H toda uma teoria no estudo de equaes
diferenciais a derivadas parciais que define uma metodologia para a construo
destas funes. Obviamente, uma discusso sobre esta teoria foge do escopo
deste curso, mas, para aqueles que desejam se aprofundar neste estudo, uma
boa referncia Sobolev (1989). Discutiremos, aqui, apenas alguns aspectos
principais. Tecnicamente, uma funo de Green de um operador linear L em um
ponto x
0
qualquer soluo de (Lf)(x) = (x-x
0
), onde representa a funo delta
de Dirac. Esta funo, por sua vez, uma funo descontnua que apresenta a
propriedade: =0, para qualquer xx
0
e (x
0
) = . Alm disso, temos que:
. 1 ) ( =
+
x
Denominemos ) , (
0
x x G
r r
a funo de Green de um problema de contorno
particular. No caso da equao de Laplace, o operador linear L corresponde ao
prprio operador Laplaciano . Assim, neste caso, a funo de Green dever
satisfazer a seguinte identidade:
()
) , , ( ) , (
0 0 0 0
z z y y x x x x G =
r r
Hidrodinmica I 38
e, conseqentemente:
1 ) , (
0
=
dV x x G
V
r r
onde V representa uma regio que envolve o ponto (x
0
,y
0
,z
0
).
Sem a imposio de condies de contorno especficas, a funo de Green
referente equao de Laplace dada por:
2
0
2
0
2
0
0
) ( ) ( ) (
1
4
1
) , (
z z y y x x
x x G
+ +
=
r r
(2.17)
ou, definindo r como a distncia entre os pontos (x,y,z) e (x
0
,y
0
,z
0
): r G 4 1 = .
Esta funo conhecida como soluo fundamental (ou soluo principal) da
equao de Laplace.
Podemos indicar a demonstrao deste fato: De acordo com o teorema da
divergncia, podemos escrever:
1 ) , ( ) , (
0 0
= = =
dS n G dV x x G dV x x G
S V V
r r r r r
onde S representa a fronteira da regio V, orientada segundo o versos normal n
r
.
Trabalhando em coordenadas esfricas e considerando que S corresponda
superfcie de uma esfera de raio r centrada no ponto (x
0
,y
0
,z
0
), temos, ento:
1
) (
4
2
=
=
r
r G
r dS
r
G
dS n G
S S
r
e, portanto:
r
r G
4
1
) ( =
A funo de Green definida por (2.17) justamente o que convencionamos
chamar de potencial de velocidades de uma fonte unitria tridimensional. Assim, a
equao da continuidade 0 = , tem como soluo fundamental, no caso
tridimensional, o potencial de uma fonte unitria
S
dado por:
2
0
2
0
2
0
0
) ( ) ( ) (
1
4
1
) , (
z z y y x x
x x
S
+ +
=
r r
Hidrodinmica I 39
De maneira anloga, pode-se demonstrar que, para o caso bidimensional, a
soluo principal dada por:
2
0
2
0 0
) ( ) ( log
2
1
) , ( y y x x x x
S
+ =
r r
que representa, por sua vez, o potencial de uma fonte unitria bidimensional.
Decorre da, portanto, o fato de estas singularidades estarem presentes
como ncleo das solues de vrios problemas de escoamento potencial que j
estudamos ao longo da graduao.
Obviamente, contudo, as solues dependero das condies de contorno
especficas de cada problema. Vrias tcnicas matemticas podem ser
empregadas para estimar estas solues. Assim, por exemplo, no caso de
escoamentos bidimensionais, uma srie de ferramentas matemticas podem ser
exploradas atravs da teoria de funes analticas, com a definio do potencial
complexo. Em particular, esta opo permite o emprego do chamado mapeamento
conforme, que permite obter a soluo de geometrias 2D complexas mediante a
soluo de problemas com geometrias mais simples
19
. A tcnica de separao de
variveis pode ser empregada em casos de escoamentos tridimensionais, atravs
da qual se obtm uma aproximao para o potencial de velocidades procurado
atravs de uma combinao linear dos chamados multipolos. Uma boa referncia
para uma primeira leitura sobre estas tcnicas Newman (1977).
Para o caso de problemas de escoamento potencial com superfcie-livre e
geometrias complexas, como cascos de navios ou plataformas ocenicas, a
soluo do problema de contorno invariavelmente recorre a mtodos numricos.
Um dos mtodos mais difundidos atualmente para a soluo do problema de
comportamento no mar de sistemas ocenicos o mtodo de elementos de
contorno (boundary elements method, BEM). O estudo dos fundamentos deste
mtodo j foi realizado em PNV2441 e ser retomado no Captulo 5 deste texto.
Devemos nos lembrar, contudo, que a operacionalizao deste mtodo depende
19
No caso especfico do problema de comportamento no mar, a tcnica de mapeamento conforme
uma alternativa para ser empregada no tratamento de corpos esbeltos, atravs da chamada
teoria de faixas (strip theory). Uma discusso sobre este ponto feita no Captulo 5.
Hidrodinmica I 40
de uma modelagem matemtica prvia do potencial de velocidades procurado.
Esta modelagem pode ser baseada, por exemplo, considerando-se o potencial de
velocidades procurado como aquele decorrente de uma distribuio de fontes
sobre a superfcie do corpo (mtodo das fontes) ou, alternativamente, atravs de
uma aplicao direta do teorema de Green. Neste ltimo caso, a soluo numrica
se baseia na aplicao da funo de Green apropriada para o problema em
questo. A funo apropriada aquela que naturalmente satisfaz as condies de
contorno em parte da fronteira (retomaremos essa discusso no captulo 5). Em
ambas as modelagens, contudo, as singularidades (fontes) so partes inerentes
da soluo.
2.2.4. Foras Hidrodinmicas
Retomemos o problema de escoamento potencial ao redor de um corpo
imerso em fluido sem fronteiras para discutirmos o equacionamento das foras
que atuam sobre o corpo em decorrncia do campo de presses dinmico.
Iniciaremos com o caso mais simples, quando o escoamento uniforme. Neste
caso, supondo Oxyz solidrio ao corpo, os dois problemas ilustrados abaixo so
idnticos do ponto de vista dinmico, a menos de uma mudana de referencial:
x
y
U
z
S
B
n
x
y
U
z
S
B
x
y
U
z
S
B
nn
i U
n
x
S
B
r
r
=
=
=
lim
; 0
0
x
y
U
z
S
B
n
x
y
U
z
S
B
nn
0 lim
;
0
r
r
r
=
=
=
x
S
i U n
B
Figura 10 Escoamento uniforme: corpos fixos e corpos em movimento
Hidrodinmica I 41
No caso mais geral, quando o escoamento no uniforme e , as
mesmas condies cinemticas se aplicam s velocidades do corpo e do fluido,
porm, agora, os problemas sero diferentes do ponto de vista dinmico.
) (t U U
r r
=
Nas dedues a seguir, consideraremos o caso no qual o corpo se move
atravs de um fluido originalmente em repouso, com velocidade ) (t U
r
.
Consideraremos, ento, as seis componentes do vetor de foras e momentos
de origem hidrodinmica que atuam sobre o corpo em movimento e que
sero obtidos mediante integrao direta do campo de presses sobre o corpo:
) (t F
r
) (t M
r
=
=
B
B
S
S
dS n r p M
dS n p F
) (
r r
r
r
r
(2.18)
onde o versor normal orientado para fora do domnio fluido (e, portanto, para
dentro do corpo) e
n
r
r
r
o vetor posio da superfcie dS no sistema de referncias
O(x,y,z).
Desconsiderando a parcela hidrosttica do campo de presses (as quais
resultam nas foras de empuxo sobre o corpo), o campo de presses p obtido a
partir da equao de Bernoulli na sua forma (2.7) e, assim:
=
B
B
S
S
dS n r
t
M
dS n
t
F
) (
2
1
2
1
r r
r
r
r
(2.19)
possvel obter um equacionamento alternativo para as foras e momentos
expressos em (2.19) ao considerarmos uma superfcie de controle S
C
fixa, exterior
superfcie do corpo S
B
, como ilustrado na figura abaixo.
Hidrodinmica I 42
S
B
n
U(t)
S
C
n
S
B
nn
U(t)
S
C
nn
Figura 11 Esquematizao da superfcie de controle S
C
possvel demonstrar
20
que as foras e momentos sobre o corpo podem
ser escritos tambm na forma:
( )
( )
=
C B
C B
S S
S S
dS n
n
r dS n r
dt
d
M
dS n
n
dS n
dt
d
F
r r r r
r
r r
r
2
1
) (
2
1
(2.20)
Do ponto de vista matemtico, a vantagem obtida ao se equacionar as
foras e momentos na forma (2.20) no evidente, se as compararmos com as
expresses (2.19). Todavia, uma grande simplificao pode ser obtida, por
exemplo, no caso de um corpo se movendo em fluido sem fronteiras. Neste caso,
tomando partido do fato de a superfcie de controle ser arbitrria, podemos
posicion-la na regio que convencionamos denominar campo distante (far field,
em ingls). Como o prprio nome indica, trata-se da regio do escoamento
suficientemente afastada do corpo, regio na qual, os detalhes geomtricos do
corpo no mais so importantes para o escoamento local. A convenincia da
formulao (2.20) ficar clara a seguir, quando discutirmos especificamente o
problema de um corpo em movimento arbitrrio em um fluido sem fronteiras.
20
Essa demonstrao relativamente extensa e envolve a aplicao do teorema da divergncia e
do teorema do transporte. Pode ser encontrada em Newman [1977] pg. 132 a 134.
Hidrodinmica I 43
Consideremos agora, o problema de um corpo rgido que se move em um
fluido sem fronteiras, originalmente em repouso. Nesse caso, se tomarmos a
superfcie de controle em uma regio suficientemente distante do corpo, as
contribuies para as foras e momentos oriundas da integrao em S
C
tendero
a zero e, dessa forma, resulta simplesmente:
=
=
B
B
S
S
dS n r
dt
d
M
dS n
dt
d
F
) (
r r
r
r
r
(2.21)
Para o caso particular de o corpo se mover com velocidade constante
cte U U U U = = ) , , (
3 2 1
r
, recamos em um problema de escoamento potencial em
regime permanente e, nesse caso, a integral sobre o corpo na primeira equao
de (2.21) resulta independente do tempo. Conseqentemente, conclui-se que,
para o problema de translao do corpo com velocidade constante atravs de um
fluido inviscido e irrotacional, a resultante das foras hidrodinmicas sobre o corpo
ser nula ( 0
r r
= F ). Este resultado configura o conhecido Paradoxo de DAlembert,
ao qual nos referimos anteriormente. Todavia, nesta mesma situao, um
momento no nulo pode existir. De fato, consideremos como exemplo o caso de
um corpo se deslocando paralelamente ao eixo x (sistema de referncia Oxyz,
fixo), com velocidade . O problema somente ser independente do tempo
em um sistema de referncias que se move com o corpo (Oxyz). A relao entre
os dois referenciais dada por:
i U U
r r
1
=
z z
y y
t U x x
=
=
=
'
'
'
1
e, portanto: i t U r r
r
r r
1
' =
Neste sistema de referncias, o potencial ' , ' , ' ( z y x ) ser independente do
tempo, assim como o versor normal ) , , (
3 2 1
n n n n =
r
, mas o produto vetorial n r
r r
'
no o ser, pois:
k tn U j tn U n r n r
r r
r r r r
2 1 3 1
' =
Hidrodinmica I 44
Assim, retomando o caso mais geral de translao uniforme com
cte U U U U = = ) , , (
3 2 1
r
e observando que podemos escrever:
) ( ' n U t n r n r
r
r
r r r r
=
ento, o momento sobre o corpo em (2.21) pode ser reescrito na forma:
= =
B B B
S S S
dS n U t
dt
d
dS n r
dt
d
dS n r
dt
d
M ) ( ) ' ( ) (
r
r
r r r r
r
e, finalmente:
= =
B B
S S
dS n U dS n U M
r
r
r
r r
) ( (2.22)
A expresso (2.22) demonstra que o momento hidrodinmico atuante sobre
o corpo perpendicular ao vetor velocidade U
r
. Mais ainda, esse momento ser
nulo se o corpo possuir simetria em relao aos dois eixos perpendiculares a U
r
(pois a integral nessas duas direes resultar nula devido simetria do termo
n
r
). Assim, o momento sobre uma esfera em translao uniforme ser nulo, mas,
por exemplo, no caso de deslocamento de um submarino ou torpedo (que
apresenta simetria apenas com relao ao plano vertical que inclui a linha de
centro), o corpo experimentar um momento de pitch (que tende a subir ou
baixar sua proa), desestabilizando o movimento do corpo.
O momento expresso em (2.22) usualmente conhecido como momento de
Munk e desempenha um papel crucial em aerodinmica e hidrodinmica. Como
vimos, um corpo como um torpedo ou a fuselagem de um avio em movimento
retilneo uniforme sofrer a ao do momento de Munk, que tende a desvi-lo de
seu curso original. Este fato exige a adoo de medidas corretivas para garantir a
estabilidade direcional do corpo. De forma emprica, a soluo deste tipo de
problema conhecida h muito tempo e explica, por exemplo, a necessidade do
emprego de penas na extremidade posterior de uma flecha. O mesmo papel
desempenhado pelos estabilizadores adotados em avies, torpedos e submarinos,
denominados genericamente empenagens
21
. Deve-se observar que, mesmo que
haja simetria geomtrica do corpo, a simetria do escoamento depender da
Hidrodinmica I 45
direo de propagao. Assim, por exemplo, mesmo que a fuselagem seja um
corpo de revoluo alongado em movimento retilneo uniforme, qualquer
perturbao na velocidade (pequenas e inevitveis componentes de velocidade
perpendiculares velocidade de avano) acarretar em uma perda da simetria do
escoamento e induzir um momento desestabilizador.
Retomemos, ento, o caso mais geral quando o movimento no uniforme,
considerando os seis graus de liberdade do corpo. Nesta seo, tomaremos a
liberdade de utilizar uma notao alternativa para simplificar o equacionamento.
Assim, denotaremos as trs componentes de translao (surge, sway e heave)
atravs dos ndices i={1,2,3}, respectivamente. Da mesma forma, as trs
componentes de rotao (roll, pitch e yaw) sero referenciadas atravs dos
ndices i={4,5,6}. Dessa forma, se o corpo apresenta velocidades de translao
e rotao com relao a um referencial que se move com o corpo, em
nossa notao podemos escrever:
) (t U
r
) (t
r
)) ( ), ( ), ( ( )) ( ), ( ), ( ( ) (
)) ( ), ( ), ( ( ) (
6 5 4 3 2 1
3 2 1
t U t U t U t t t t
t U t U t U t U
= =
=
r
r
A condio de contorno apropriada no corpo (condio de
impermeabilidade) implica que:
n r U n
r r
r r
r
+ = ) ' ( em S
B
ou, alternativamente:
) ' ( n r n U
n
r r
r
r
r
+ =
em S
B
A forma da condio de contorno acima permite supor uma soluo do tipo:
(2.23)
=
=
6
1
) (
i
i i
t U
Aqui, cada componente
i
representar, fisicamente, o potencial de
velocidades relativo ao um movimento com velocidade unitria no grau de
liberdade i.
21
Do francs empennage, penas de uma flecha.
Hidrodinmica I 46
fcil perceber que (2.23) ser de fato soluo desde que as respectivas
componentes
i
satisfaam a equao de Laplace, a condio de evanescncia e
as seguintes condies no corpo:
i
i
n
n
=
i=1,2,3
(2.24)
3
) ' (
=
i
i
n r
n
r r
i=4,5,6
importante notar que cada um dos componentes
i
depende apenas da
geometria do corpo, no dependendo das velocidades do corpo rgido e, portanto,
do tempo.
A fora hidrodinmica atuante sobre o corpo dada pela equao (2.21).
Considerando (2.23) em (2.21), percebemos que a fora total ser obtida atravs
da composio de seis vetores, na forma:
= =
=
=
B B B
S
i i
S
i i
S
i i i
i
i
dS
t
n
U dS n U dS n t U
dt
d
F
F F
r
r
&
r
r
r r
) (
6
1
importante notar que, devido rotao do corpo, o versor normal sofre
variao com o tempo, a qual, por sua vez, dada por:
n
t
n r
r
r
=
Assim, a fora hidrodinmica total dada pela somatria das seguintes
componentes:
=
B B
S
i i
S
i i i
dS n U dS n U F
r
r
r
&
r
(2.25)
O momento hidrodinmico tambm est expresso na equao (2.21).
Todavia, deve-se notar que o vetor r
r
definido em relao ao referencial fixo no
espao e, portanto, depende do tempo. Se ) (t r
O
r
denotar o vetor posio da
origem do sistema de coordenadas solidrio ao corpo, podemos escrever:
Hidrodinmica I 47
' ) ( r t r r
O
r r r
+ =
e o momento ser dado por:
=
B B
S S
O
dS n r
dt
d
dS n r
dt
d
M ) ' ( ) (
r r r r
r
ou:
=
B B
S S
O
dS n r
dt
d
dS n r
dt
d
M ) ' (
r r r r
r
e, lembrando que ) ( ) ( t U dt t r d
O
r
r
= , temos:
=
B B
S S
O
dS n r
dt
d
dS n U F r M ) ' (
r r r
r r
r
r
Por fim, devemos observar que ) ' ( n r
r r
um vetor fixo com relao ao
sistema de coordenadas solidrio ao corpo e, portanto:
) ' (
) ' (
n r
dt
n r d r r
r
r r
=
O momento resulta, ento:
=
B B B
S S S
O
dS n r dS n r
t
dS n U F r M ) ' ( ) ' (
r r
r
r r r
r r
r
r
Deve-se notar que o primeiro termo corresponde ao momento gerado pela
fora resultante aplicada na origem do sistema mvel em relao origem do
sistema fixo. Dessa forma, o momento hidrodinmico calculado com relao
origem do sistema que se move com o corpo dado por:
F
r
=
B B B
S S S
dS n r dS n r
t
dS n U M ) ' ( ) ' (
r r
r
r r r
r r
(2.26)
Considerando, agora, a decomposio do potencial (2.23) na expresso do
momento (2.26), temos:
=
=
6
1 i
i
M M
r r
onde:
Hidrodinmica I 48
=
B B B
S
i i
S
i i
S
i i i
dS n r U dS n r U dS n U U M ) ' ( ) ' (
r r
r
r r
&
r
r r
(2.27)
As expresses (2.25) e (2.27) sumarizam o clculo da fora e momento
hidrodinmicos atuantes sobre um corpo tridimensional que realiza um movimento
arbitrrio atravs do fluido. Cabe notar, todavia, que cada um dos integrandos
presentes nestas duas expresses representa um vetor que depende apenas da
geometria do corpo. Cada um destes vetores apresenta trs componentes
{j=1,2,3} e, de acordo com as condies de contorno no corpo definidas em (2.24),
podemos escrever cada uma destas componentes de uma maneira alternativa:
=
+
B B
B B
S
j
i
S
j i
S
j
i
S
j i
dS
n
dS n r
dS
n
dS n
3
) ' (
r r
Dessa forma, verifica-se que todas as integrais presentes em (2.25) e (2.27)
podem ser agrupadas em uma matriz (6X6), usualmente denominada matriz de
massa adicional, dada por:
=
B
S
l
k lk
dS
n
m
k=1,..,6 e l=1,..,6 (2.28)
Cada um dos termos de fora e momento hidrodinmicos depende apenas
das velocidades e aceleraes de corpo rgido e dos coeficientes de massa
adicional m
kl
. Esses ltimos, por sua vez, dependem exclusivamente da geometria
do corpo e, uma vez que estamos trabalhando no contexto de fluido inviscido, os
coeficientes de massa adicional caracterizam plenamente as propriedades
hidrodinmicas do corpo
22
.
importante ressaltar, tambm, que as expresses de fora e momento
(2.25) e (2.27) foram deduzidas sob a hiptese de o fluido no ser limitado por
outras fronteiras que no aquelas impostas pelo prprio corpo. Nos casos em que
22
Obviamente, a geometria do corpo traz implicaes tambm sobre o arrasto hidrodinmico
decorrente dos efeitos de viscosidade.
Hidrodinmica I 49
efeitos de superfcie-livre so relevantes, por exemplo, estas expresses se
modificam. Retornaremos a este problema nos captulos 4 e 5.
Antes de encerrar este breve apanhado sobre a teoria de escoamento
potencial, algumas propriedades importantes relativas aos coeficientes de massa
adicional sero discutidas a seguir.
2.2.5. Massa Adicional
As massas adicionais do corpo representam, do ponto de vista fsico, a
quantidade de fluido acelerada pelo movimento do corpo. Sua denominao
decorre de uma analogia direta com as foras de inrcia do corpo rgido, as quais
se expressam na mesma forma das expresses (2.25) e (2.27), com a massa e os
momentos de inrcia do corpo substituindo os coeficientes de massa adicional
(para uma demonstrao desta analogia, ver Newman (1977), pg.148). Esta
igualdade de forma permite que as foras inerciais totais agindo sobre o corpo
sejam escritas atravs de uma matriz de massas virtuais, cujos coeficientes so
dados pela soma das inrcias do corpo e adicionais (M
ij
+ m
ij
).
Deve-se, no entanto, tomar cuidado com essa analogia, observando, por
exemplo, que, em geral, as massas adicionais de translao (m
11
, m
22
, m
33
) de um
corpo so diferentes (a menos que simetrias geomtricas sejam garantidas) e,
portanto, essas massas dependem da direo do movimento do corpo. Alm
disso, no havendo a referida simetria, coeficientes cruzados (m
12
, m
13
, m
23
) sero
no-nulos, o que implica que as foras inerciais hidrodinmicas tero direo
diferente da acelerao do corpo.
Do fato de as inrcias fluidas dependerem da direo de movimento do
corpo decorre tambm o fato de o vetor quantidade de movimento do fluido no
ser, em geral, paralelo ao vetor velocidade do corpo, o que explica, de outro ponto
de vista, a existncia do momento de Munk, discutida anteriormente.
A matriz de massas adicionais uma matriz simtrica, ou seja: . A
demonstrao dessa propriedade simples, bastando-se aplicar o Teorema de
ji ij
m m =
Hidrodinmica I 50
Green aos potenciais
i
e
j
sobre a superfcie S
B
+ S
C
(ver Figura 11). Se
tomarmos a superfcie S
C
a uma distncia suficientemente grande do corpo (e
temos liberdade para isso, nesse caso), a integral sobre S
C
se anular em
decorrncia da condio de evanescncia do potencial. Assim:
B
S
i
j
j
i
dS
n n
0
e, portanto:
ji ij
m m =
H, tambm, uma relao direta entre massa adicional e energia cintica do
fluido, como mostraremos a seguir:
A energia cintica do fluido (T) dada por:
=
V
dV T ) (
2
1
(2.29)
com o domnio de integrao representado todo o domnio fluido limitado por S
B
e
S
C
, de acordo com a Figura 11.
A energia cintica pode ser reescrita em funo dos potenciais
i
,
empregando-se, para isso, a decomposio (2.23) na expresso (2.29):
=
i j
V
j j i i
dV U U T ) ( ) (
2
1
=
i j
V
j i j i
dV U U T ) (
2
1
Por outro lado, a partir da definio dos coeficientes de massa adicional
(2.28) e da aplicao do Teorema da Divergncia, temos
23
:
dV dV dS
n
m
j i
V
i j
V S
i
j ij
B
) ( ) (
= =
=
e, portanto:
23
Lembrar que 0 =
i
Hidrodinmica I 51
=
i j
j i ij
U U m T
2
1
(2.30)
Assim, percebe-se que os coeficientes de massa adicional so constantes
que multiplicam termos quadrticos nas componentes de velocidade do corpo, o
que refora, mais uma vez, a analogia dos coeficientes m
ij
com massas.
Newman (1977) apresenta valores dos coeficientes de massa adicional
para algumas geometrias particulares, 2D e 3D, para as quais possvel obter
valores analticos das massas adicionais. A Figura 12 apresenta os coeficientes de
massa adicional de algumas figuras planas (a maioria calculada atravs de
tcnicas de mapeamento conforme).
Figura 12 Coeficientes de massa adicional de alguns corpos 2D (fonte: Newman,1977)
A Figura 13 apresenta os coeficientes normalizados para elipsides de
revoluo, empregando como fatores de adimensionalizao a massa e o
momento de inrcia do volume fluido deslocado pelo corpo.
Hidrodinmica I 52
Figura 13 Coeficientes de massa adicional de elipsides de revoluo
Hidrodinmica I 53
3. TEORIA LINEAR DE ONDAS DE GRAVIDADE
The basic law of the seaway
is the apparent lack of any law
Lord Rayleigh
O que caracteriza de fato a chamada hidrodinmica martima o estudo da
propagao de ondas na superfcie do mar. O estudo do comportamento dinmico
de estruturas flutuantes em ondas requer, como ponto de partida, que sejamos
capazes de modelar a excitao causada por uma determinada situao de mar.
O carter aleatrio das ondas do mar traz como conseqncia a necessidade de
um tratamento estatstico do problema (que ser discutido nas sees 3.6 e 3.7),
tratamento este que se funda, como veremos, no estudo da chamada Teoria
Linear de Ondas de Gravidade.
Toda a modelagem matemtica que ser apresentada neste captulo
baseada na teoria do potencial, implicando, portanto, em escoamento irrotacional.
De fato, os fundamentos da teoria que hoje agrupamos sob o nome de teoria de
ondas de superfcie foram estabelecidos antes da deduo das equaes de
Navier-Stokes, como veremos na seo 3.1. Efeitos de viscosidade so
importantes em alguns problemas especficos, como no caso do estudo das foras
de excitao de ondas sobre corpos de pequenas dimenses (problema que
discutiremos mais adiante, no Captulo 4) e no problema de gerao de ondas
pelo vento (discutido, de forma breve, na seo 3.7). Todavia, para o estudo geral
de ondas de superfcie e para o problema de comportamento no mar, os efeitos de
viscosidade podem, em geral, ser desprezados, com excelentes comprovaes
experimentais (voltaremos a discutir este ponto na seo 4.1).
importante destacar tambm que outros fenmenos ondulatrios so
verificados no ambiente ocenico, alm das ondas de superfcie que trataremos
neste captulo. Exemplos destes fenmenos so as chamadas ondas internas
Hidrodinmica I 54
(internal waves), causadas por diferenas de densidade, e as ondas inerciais
(inertial waves), associadas acelerao de Coriolis. Nestes dois casos, no
entanto, as freqncias de oscilao so baixas o suficiente para no causar
efeitos dinmicos significativos em corpos flutuantes ou imersos e, assim,
apresentam pouco interesse no contexto da engenharia naval. No outro extremo
do espectro, h fenmenos ondulatrios em altas freqncias, como as ondas
capilares, que tambm no afetam significativamente corpos de dimenses usuais
em engenharia naval e ocenica
24
.
Assim, este captulo dedicado teoria que nos permite representar as
ondas de superfcie e sua ao sobre corpos flutuantes e imersos e tambm as
ondas geradas pelo movimento de uma embarcao (importante, por exemplo, no
estudo de resistncia ao avano). Em particular, estudaremos esta teoria no
contexto das ondas de pequena amplitude, o que nos permitir linearizar o
problema de contorno, trazendo grandes simplificaes matemticas. Veremos
que este procedimento adequado para boa parte dos problemas em engenharia,
embora efeitos no-lineares sejam importantes em muitas aplicaes de
engenharia naval e ocenica. De fato, a teoria no-linear de ondas um tpico de
estudo importante para aqueles que pretendem atuar na rea, mas no faz parte
do escopo deste curso bsico. Aqui, nos restringiremos a discutir alguns aspectos
fundamentais da modelagem dos fenmenos no-lineares e discutir alguns dos
principais problemas decorrentes dos mesmos no campo da engenharia ocenica
(objetivos do Captulo 5).
3.1. Nota Histrica
Raros so os livros didticos na rea de hidrodinmica que trazem um contexto
histrico da evoluo da teoria que trata das ondas de superfcie. Este fato talvez
se deva a uma relativa desorganizao do processo que levou ao que hoje
entendemos como teoria de ondas de gravidade. De fato, vrios cientistas
24
Para uma descrio aprofundada destes fenmenos ondulatrios ver, por exemplo, Phillips
(1966).
Hidrodinmica I 55
abordaram o tema, desenvolvendo um equacionamento que tem origem
praticamente simultnea com o desenvolvimento da teoria de fluidos ideais,
especialmente a partir do sculo XVIII, como vimos anteriormente. Muitos dos
trabalhos originais mais importantes, embora contribuam com resultados
fundamentais quanto modelagem matemtica do problema, trazem erros e foram
alvo de controvrsias no meio acadmico durante muito tempo. Nesta seo
discutiremos alguns aspectos importantes deste desenvolvimento, com a
finalidade de situ-lo no contexto histrico abordado no captulo anterior. Para os
que tiverem interesse em maiores detalhes, duas excelentes referncias so Craik
(2004) e Craik (2005). Ao longo deste captulo, notas adicionais sobre as origens
da teoria de ondas de superfcie sero apresentadas, concomitantemente com o
equacionamento.
No de se surpreender que Newton tenha sido pioneiro na tentativa de
elaborar uma teoria matemtica de ondas. Em seu Principia (1687), Newton
props uma analogia entre as ondas de superfcie e o escoamento oscilatrio em
um tubo em U. Embora com bvias limitaes, as hipteses de Newton permitiram
equacionar corretamente a relao entre a freqncia angular () e o comprimento
de onda () na ausncia de efeitos de fundo, deduzindo que 1 . Newton
estava consciente das limitaes do modelo que propunha e explicitou que isto
verdade na suposio de que as partes de gua sobem ou descem em linha reta,
mas, na verdade, este movimento realizado em um crculo.
Quase um sculo depois, j conhecidas as equaes propostas por Euler,
Laplace reexaminou o problema das ondas. Foi ele o primeiro a mostrar que o
escoamento induzido pelas ondas governado pela equao diferencial que hoje
conhecemos como Equao de Laplace. Atravs de uma descrio Lagrangiana
do movimento e denotando por x e z pequenos deslocamentos das partculas na
direo horizontal e vertical, com posio inicial (X;Z), Laplace chega nas
seguintes solues peridicas:
Hidrodinmica I 56
{ }
{ }
c Z c Z
c Z c Z
e e
c
X
t A z
e e
c
X
sen t A x
/ /
/ /
cos ) (
) (
=
+ =
com z=0 representando o fundo. J se verifica na deduo de Laplace, portanto, a
variao hiperblica com a profundidade e as trajetrias elpticas das partculas
fluidas, corretamente satisfazendo a condio de impermeabilidade em Z=0.
Simultaneamente e de forma independente, Lagrange derivou as equaes
linearizadas para ondas de pequena amplitude e obteve a soluo para o caso
limite de ondas longas em profundidade finita. Para ondas em profundidade finita,
Lagrange descobriu que a velocidade de propagao das ondas ser aquela que
um corpo pesado iria adquirir ao cair de uma altura correspondente metade da
altura da gua no canal, ou seja, gh .
Conquanto vrios trabalhos adicionais tenham sido publicados neste
perodo, com diferentes graus de sofisticao, o prximo passo significativo na
modelagem adveio de um trabalho publicado por Cauchy
25
, ento com 25 anos de
idade, como resultado de sua participao em um concurso lanado em 1813 pela
Acadmie de Sciences, do qual saiu vencedor. Poisson
26
, ento um dos juzes do
concurso, depositou um memorial independente sobre o tema. Os trabalhos
apresentavam uma sofisticao matemtica muito acima do comum para a poca,
o que afastou os leitores e rendeu violentas crticas posteriores, especialmente por
parte dos cientistas ingleses que desenvolveram importantes trabalhos neste
campo ao longo do sculo XIX. A anlise de Cauchy e Poisson empregava
transformadas de Fourier com superposio de infinitos modos estacionrios,
cada qual com freqncia prpria de oscilao, e aproximaes assintticas para
realizar as integraes. Alm dos mtodos matemticos repelirem boa parte dos
25
Cauchy, Agustin-Louis (1789-1857): Matemtico francs, famoso pelo rigor empregado em suas
demonstraes, realizou contribuies importantssimas em diversas reas da matemtica
(anlise, teoria das sries, clculo a variveis complexas, etc.) e fsica (ptica, hidrodinmica,
elasticidade).
Hidrodinmica I 57
leitores, alguns resultados fsicos, decorrentes de fato do carter dispersivo das
ondas de gravidade, eram contrrios intuio, o que colaborou ainda mais para
as crticas negativas. Todavia, embora trouxesse algumas inconsistncias, a
anlise de Cauchy-Poisson hoje tida como um importante marco da teoria
matemtica de problemas de valor inicial.
A partir da primeira metade do sculo XIX, grandes contribuies teoria
de ondas de superfcie foram dadas por pesquisadores ingleses. Seguindo a
tradio empirista britnica, estes trabalhos foram orientados por importantes
experimentos cientficos realizados em tanques de provas, dentre os quais
aqueles realizados por Russell
27
. Os experimentos de Russell ficaram famosos por
sua descoberta da onda solitria (solitary wave), qual chamou (com certo
exagero, como depois escreveria Airy
28
) de The Great Primary Wave.
Dentre os importantes trabalhos desta poca esto os de Green
29
, Airy e,
finalmente, Stokes
30
. Mais uma vez, intensas disputas acadmicas em torno da
teoria foram travadas na poca (ver Craik (2004), para maiores detalhes). Em seu
trabalho On the motion of waves in a variable canal of small depth and width, de
1838, Green apresenta provavelmente a primeira aplicao do que hoje
26
Poisson, Simon Denis (1781-1840): fsico-matemtico francs com inmeros trabalhos
fundamentais em matemtica pura e aplicada, fsica-matemtica e mecnica.
27
Russell, John Scott (1808-1882): Nascido em Glasgow, lecionou matemtica e filosofia natural
na Universidade de Edimburgo. Posteriormente, trabalhou como engenheiro naval, funo na qual
realizou diversos ensaios em canais.
28
Airy, Sir George Biddell (1801-1892): Astrnomo britnico, fez importantes contribuies teoria
de ondas.
29
Green, George (1793-1841): matemtico britnico; seu trabalho mais importante An Essay on
the Applications of Mathematical Analysis to the Theories of Electricity and Magnetism (1828),
introduz vrios conceitos importantes, entre eles a idia de funes potenciais e a classe de
funes que hoje recebe seu nome.
30
Stokes, George Gabriel (1819-1903): fsico-matemtico irlands, Stokes lecionou durante muito
tempo na Universidade de Cambridge, perodo no qual publicou seus mais importantes trabalhos.
Considerado um dos cientistas mais importantes de seu tempo, tem contribuies fundamentais
em mecnica dos fluidos (entre elas, as equaes de Navier-Stokes), ptica e fsica-matemtica
(incluindo o teorema hoje conhecido como Teorema de Stokes).
Hidrodinmica I 58
conhecemos como Mtodo de Escalas Mltiplas ao problema de ondas e prova
que, em profundidade infinita, as trajetrias das partculas fluidas so crculos com
raios que decaem exponencialmente com a profundidade (muito embora esse
resultado pudesse ter sido facilmente obtido a partir do equacionamento proposto
muito tempo antes por Laplace). Embora seu maior interesse fosse na teoria das
mars, Airy trabalhou tambm sobre o problema de ondas em um canal, provando
a forma elptica das trajetrias em profundidade finita e deduzindo corretamente a
relao de disperso de ondas neste caso. Alm disso, Airy afirmou
categoricamente que ...provided it be long in proportion to the depth of the fluid,
the wave can, when moving freely, have no other velocity than gh ...but Mr.
Russel was not aware of the influence of the length of the wave in any case and
therefore has not given it. Isto, combinado com sua crtica importncia
desproporcional dada por Russel onda solitria, iniciou uma longa disputa entre
os dois pesquisadores.
Os trabalhos mais importantes de Airy foram publicados quando Stokes
comeava seus estudos sobre ondas. Sem dvida, os trabalhos posteriores de
Stokes esto entre os mais influentes na histria da teoria de ondas de superfcie,
tendo sido ele, por exemplo, quem formalizou de forma definitiva o
equacionamento de ondas irregulares atravs da somatria de componentes
harmnicas. Stokes tambm introduziu importantes avanos com relao
modelagem no-linear de ondas e seus resultados voltaro a ser discutidos no
Captulo 5. Um histrico bastante completo da trajetria cientfica de Stokes pode
ser encontrado em Craik (2005).
3.2. O Problema de Contorno: Ondas Planas Progressivas
Revisaremos, deste ponto em diante, os principais aspectos da chamada
Teoria Linear de Ondas de Gravidade, com a qual o aluno j teve um primeiro
contato nas disciplinas de graduao do curso de Engenharia Naval. Estudaremos
inicialmente o problema mais simples, referente a uma onda plana progressiva,
cuja soluo constitui a base para a modelagem estatstica das ondas do mar que
Hidrodinmica I 59
discutiremos mais adiante. Este problema est ilustrado, esquematicamente, na
figura abaixo.
Figura 14 Onda plana progressiva em regio de profundidade h
A onda, neste caso, se caracteriza por sua amplitude A (
a
na figura), pelo seu
comprimento e seu perodo de oscilao T. A elevao da superfcie descrita
pela relao z = (x,t). A partir destes parmetros bsicos, podemos definir outros
que sero importantes para a compreenso do problema. Assim, podemos definir
a freqncia angular da onda ( T 2 = ) e o chamado nmero de onda
( 2 = k ).
A velocidade de fase (ou velocidade de propagao) da onda a velocidade
de movimento das cristas e cavas e , obviamente, definida por:
T
c
= (3.1)
A altura de onda (H) definida pela altura entre a crista e a cava da onda e sua
declividade (wave steepness, em ingls) dada por H/.
No contexto da teoria potencial, o problema consiste em determinar o potencial
de velocidades (x,z,t) do escoamento induzido por este campo ondulatrio. Uma
vez conhecido tal potencial, o campo de velocidades no fluido estar definido,
assim como o campo de presses, atravs da Equao de Bernoulli na sua forma
(2.7). Discutiremos, a seguir, a formulao do problema de contorno e sua soluo
mais simples, que d origem chamada teoria linear de ondas.
Hidrodinmica I 60
Condio de Continuidade e Equao de Laplace
Como vimos anteriormente, no contexto da teoria potencial toda a dinmica
do fluido resulta da imposio da condio de conservao de massa. Assim, a
equao bsica a ser satisfeita a equao de Laplace:
0
2
2
2
2
2
2
=
=
z y x
No caso em estudo, temos: 0 = y e 0
2 2
= y . Assim, no problema
plano:
0
2
2
2
2
=
=
z x
(3.2)
Procuramos uma soluo que resulte em uma oscilao harmnica do
potencial em x e no tempo e sabemos que a perturbao causada pela onda decai
medida que nos afastamos da superfcie. Tais aspectos fsicos naturalmente nos
induzem a procurar uma soluo da forma
31
:
(3.3) ] ) ( Re[ ) , , (
t i ikx
e z P t z x
+
=
Substituindo (3.3) na equao de Laplace, resulta a seguinte equao
diferencial ordinria de segunda-ordem:
0 ) (
) (
2
2
2
=
z P k
z
z P d
,
a qual deve ser satisfeita em todo o domnio fluido. A soluo mais geral desta
equao dada em termos de funes exponenciais:
(3.4)
kz kz
e C e C z P
+ =
2 1
) (
31
Podemos descrever a soluo em termos reais como ) ( ) ( ) , , ( t kx sen z P t z x = , bastando
lembrar que: . Todavia, nos interessa manter a notao complexa, pois
esta ser importante no tratamento do problema de comportamento no mar, que ser discutido no
captulo 5.
) ( ) cos(
isen e
i
+ =
Hidrodinmica I 61
com constantes C
1
e C
2
a serem determinadas. Portanto, a soluo geral da
equao de Laplace com uma funo da forma (3.3) resulta:
(3.5) ] ) Re[( ) , , (
2 1
t i ikx kz kz
e e C e C t z x
+
+ =
As duas constantes ainda indefinidas presentes na soluo, cujos valores a
particularizam, dependero, ento, das condies de contorno do problema. O
contorno em questo dado pelo fundo e pela prpria superfcie-livre z = (x,t). A
seguir, discutiremos as condies fsicas a serem impostas nestas fronteiras.
A Condio de Contorno no Fundo
Naturalmente, a condio de contorno a ser imposta no fundo a condio
de impermeabilidade desta fronteira (z=-h), que se expressa por:
0 =
em z=-h (3.6)
e, substituindo (3.5) em (3.6), temos:
0
2 1
=
kh kh
e C e C
condio satisfeita se:
kh
e C C 2
1
= e
kh
e C C
= 2
2
Portanto, a funo P(z) dada em (3.4) pode ser reescrita na forma:
) ( cosh ) (
2
) (
) ( ) (
h z k C e e
C
z P
h z k h z k
+ = + =
+ +
e o potencial de velocidades resulta, ento:
(3.7) ] ) ( cosh Re[ ) , , (
t i ikx
e h z k C t z x
+
+ =
restando, ainda, a determinao de C.
Condio de Contorno Dinmica na Superfcie-Livre
A prpria natureza da superfcie-livre exigir duas condies a serem
impostas. A primeira, chamada de condio dinmica, garante que a presso
hidrodinmica na superfcie seja igual presso atmosfrica, ou seja p=p
0
para
Hidrodinmica I 62
z=. Assim, sobre a superfcie-livre, a equao de Bernoulli para escoamentos
no-permanentes (2.7), implicar:
0
2
1
0 2
=
= + +
p p
g
t
(3.8)
possvel mostrar, atravs de um argumento de escala, que na hiptese
de ondas de pequena declividade ( 1 / << A ou, alternativamente, ), o
termo quadrtico na velocidade desprezvel face ao termo linear
1 << kA
t / , pois
32
:
1 ) (
/
2
<< =
kA O
t
Como primeira etapa da linearizao do problema, podemos desprezar o
termo quadrtico na condio dinmica, cuja forma linear resulta ento:
t g
1
A rigor, a condio acima deveria ser imposta sobre a superfcie z=, a qual
no conhecida a priori, o que, de fato, constitui outra fonte de no-linearidade do
problema. Todavia, fcil notar que, de forma consistente com a linearizao
proposta acima, podemos adotar, com erros da mesma ordem:
t g
1
em z=0 (3.9)
Dada a variao harmnica no espao e no tempo assumida para o
potencial de velocidades (eq. 3.3), a condio (3.9) implica em uma oscilao
tambm harmnica da superfcie-livre, a qual, ento, pode ser admitida da forma:
) cos( ) , ( t kx A t x = (3.10)
Assim, substituindo (3.7) em (3.9) e observando (3.10) obtemos, finalmente:
kh
igA
C
cosh
=
O potencial de velocidades do escoamento resulta, ento:
) (
cosh
) ( cosh
cosh
) ( cosh
Re ) , , ( t kx sen
kh
h z k gA
e
kh
h z k igA
t z x
t i ikx
+
=
+
=
+
(3.11)
32
A demonstrao fica como exerccio.
Hidrodinmica I 63
Observando (3.11), fcil notar que, no limite de profundidade infinita
( ), o potencial de velocidades dado simplesmente por: h
) ( Re ) , , ( t kx sen e
gA
e e
igA
t z x
kz t i ikx kz
=
+
(3.12)
Neste ponto, aparentemente a soluo est completa, mas, como veremos,
h ainda uma restrio adicional que traduz uma caracterstica extremamente
importante da fsica das ondas de gravidade.
Condio de Contorno Cinemtica na Superfcie-Livre
Devemos garantir a compatibilidade entre a velocidade do fluido ( ) e a
velocidade da superfcie. Para isso, observemos que a superfcie descrita por
z=(x,t) e, portanto:
dt
dx
x t dt
dz
=
em z=
A referida compatibilidade cinemtica implica, ento, que:
x x t z
em z=
mas, de acordo com a hiptese de pequena declividade, o segundo termo na
equao acima pequeno comparado com o primeiro
33
e, dessa forma, podemos
desprezar este termo de segunda-ordem, resultando:
t z
em z=0 (3.13)
No contexto da teoria linear, a condio cinemtica (3.13) pode ser
combinada com a condio dinmica (3.9) para fornecer uma condio de
contorno nica na superfcie, conhecida como condio de Cauchy-Poisson:
33
Observar que ) / ( A O x =
Hidrodinmica I 64
0
1
2
2
=
t g t
z
em z=0
ou, alternativamente:
0
2
2
=
z
g
t
em z=0 (3.14)
Substituindo a soluo (3.11) na identidade acima, decorre uma relao
entre a freqncia e o nmero de onda k na forma:
kh g
k
tanh
2
= (3.15)
que conhecida como relao de disperso de onda.
Analogamente, substituindo (3.12) em (3.14) ou observando que
quando , obtm-se a relao de disperso em guas
profundas:
1 tanh kh kh
g
k
2
= (3.16)
A relao de disperso impe, ento, uma relao entre o comprimento de
onda e seu perodo de oscilao. Em termos da velocidade de propagao da
onda, (3.15) implica que:
kh
k
g
k T
c tanh = = =
(3.16)
e, portanto, a velocidade de fase da onda cresce com seu comprimento. Essa
dependncia da velocidade de propagao na freqncia (e, portanto, no
comprimento de onda), mostra que ondas de diferentes freqncias se propagaro
com velocidades diferentes. Assim, se em um dado momento verificamos um mar
no qual identificamos uma superposio de ondas de diferentes freqncias
(caracterstico de um mar em uma regio de tempestades), com o passar do
tempo, medida que estas ondas se afastam da regio de gerao, as diferentes
componentes do mar tendem a se dispersar, formando zonas mais homogneas,
Hidrodinmica I 65
com perodos e comprimentos bem definidos (situao conhecida como swell)
34
.
Da dizermos que as ondas de gravidade so ondas dispersivas.
Atravs de (3.16), podemos tambm avaliar a influncia da profundidade
sobre a velocidade de propagao e estudar os seus limites assintticos em guas
profundas e guas rasas.
Em guas profundas, a velocidade de fase dada por:
T
k
g
c 56 . 1 25 . 1 =
J no limite de guas rasas ( ) a velocidade de propagao ser
(como j observara Airy em sua contenda com Russel) necessariamente:
0 kh
gh c =
indicando que, neste limite, as ondas no mais sero dispersivas. A esta
velocidade se d o nome de velocidade crtica de propagao. De fato, (3.16) j
mostra que, medida que a onda caminha para regies de menor profundidade,
sofre uma desacelerao. Essa dependncia da velocidade de propagao na
profundidade d origem ao fenmeno de refrao de ondas, que voltaremos a
discutir mais adiante.
Campo de velocidades e campo de presses
Uma vez determinado o potencial de velocidades do escoamento, conhece-
se a cinemtica das partculas fluidas e, atravs da equao do movimento, o
campo de presses no fluido.
O campo de velocidades no fluido dado por:
k t z x w i t z x u t z x t z x v
r r
r
) , , ( ) , , ( ) , , ( ) , , ( + = =
com as componentes de velocidade, no caso mais geral de profundidade finita, na
forma:
34
Isso explica porque os marinheiros experientes interpretam um swell como sinal de aproximao
de uma tempestade.
Hidrodinmica I 66
) sin(
sinh
) ( sinh
) , , (
) cos(
sinh
) ( cosh
) , , (
t kx
kh
h z k
A t z x w
t kx
kh
h z k
A t z x u
+
=
+
=
(3.17)
A variao espacial deste campo de velocidades ilustrada na figura
abaixo, que deve ser entendida como um retrato do campo em um determinado
instante de tempo.
Figura 15 Campo de velocidades do escoamento em profundidade finita
fcil verificar que no limite de profundidade infinita o campo de
velocidades resulta:
(3.18)
) sin( ) , , (
) cos( ) , , (
t kx Ae t z x w
t kx Ae t z x u
kz
kz
=
=
demonstrando que, na ausncia de efeitos de fundo, a velocidade do escoamento
(e, como veremos, o campo de presses dinmicas) decai exponencialmente com
a profundidade, como ilustrado abaixo:
Figura 16 Campo de velocidades do escoamento em profundidade infinita
Hidrodinmica I 67
As trajetrias descritas pelas partculas fluidas podem ser facilmente
obtidas observando que, no contexto de pequena declividade da onda (pequenos
deslocamentos das partculas fluidas), podemos aproximar a equao da trajetria
integrando no tempo os campos de velocidade (3.17) e (3.18) em torno da posio
mdia de cada partcula ( x x ; z z ).
Assim, em profundidade finita, podemos escrever:
1
sinh
) ( sinh
) (
sinh
) ( cosh
) (
2
2
2
2
=
kh
h z k
A
z z
kh
h z k
A
x x
indicando que, no contexto da teoria linear de ondas, as trajetrias das partculas
fluidas em profundidade finita correspondem a rbitas elpticas, cujos semi-eixos
verticais decaem mais rapidamente com a profundidade, at o limite em que
resultam nulos sobre o fundo ( h z = ). Na superfcie-livre ( 0 = z ), o semi-eixo
vertical equivale amplitude da onda. Estas trajetrias so esquematizadas na
figura a seguir.
Figura 17 Trajetrias das partculas em profundidade finita
Em profundidade infinita, por sua vez, as trajetrias correspondem a rbitas
circulares, cujo raio decai exponencialmente com a profundidade:
2 2 2
) ( ) ( ) (
z k
Ae z z x x = +
A figura abaixo ilustra as trajetrias neste limite:
Hidrodinmica I 68
Figura 18 Trajetrias das partculas em profundidade infinita
O campo de presses no fluido obtido mediante a aplicao da equao
de Bernoulli para escoamentos irrotacionais no-permanentes (eq. 2.7). Todavia,
para sermos consistentes com a linearizao empregada, devemos desprezar o
termo no-linear nas velocidades (proporcional a ) e, dessa forma, obtemos o
chamado campo de presses linear, dado por:
2
) cos(
cosh
) ( cosh
) , , ( t kx
kh
h z k
gA gz t z x p
+
+ = (3.19)
ou, no caso de profundidade infinita:
(3.20)
kz kz
e t x g gz t kx gAe gz t z x p ) , ( ) cos( ) , , ( + = + =
Nas expresses (3.19) e (3.20), o primeiro termo corresponde parcela
hidrosttica da presso e o segundo chamada parcela de presso dinmica. No
estudo de comportamento mar, a ao desta parcela dinmica de presso ser
responsvel pelas chamadas foras de excitao de ondas de primeira-ordem
35
.
Retornaremos a este ponto no Captulo 4.
35
Uma discusso sobre as foras de excitao de segunda-ordem alvo do Captulo 6. Dentre
estas foras encontram-se, por exemplo, as chamadas foras de deriva, extremamente importantes
na anlise dinmica de sistemas ocenicos.
Hidrodinmica I 69
3.3. Energia
As ondas de gravidade decorrem de um balanceamento entre a energia
cintica e a energia potencial do fluido. A definio da energia de onda e da
velocidade com a qual essa energia transportada importante, por exemplo, no
estudo de resistncia ao avano de embarcaes.
No caso geral, em um certo volume de fluido pr-definido (), a energia
total ser dada pela soma das parcelas cintica (K) e potencial (P), na forma:
+ = +
d gz P K
2
1
(3.21)
Consideremos agora uma coluna vertical que se estende do fundo
superfcie-livre, de forma que a rea da superfcie-livre mdia (z=0) delimitada por
esta coluna seja unitria. A densidade de energia ou energia por unidade de rea
da superfcie-livre mdia ser dada por:
) (
2
1
2
1
2
1
2 2
h g dz dz gz P K E
h h
+ =
+ = + =
Deve-se observar, no entanto, que o termo de energia potencial dado por
corresponde a uma parcela de energia constante entre o fundo e a superfcie
mdia e, portanto, no est relacionado ao movimento ondulatrio, razo pela qual
ser desconsiderado doravante.
2
2 / 1 gh
Retomando o problema mais simples de uma onda plana progressiva em
profundidade infinita, podemos considerar o campo de velocidades ( ) cujas
componentes so dadas por (3.18) e proceder integrao do termo de energia
cintica, resultando:
2 2
2 2
2
1
4
g e
k
A
E
k
+ = (3.22)
Podemos simplificar a expresso acima notando que, no contexto da teoria
linear, temos necessariamente 1 << k e, portanto, o termo exponencial na parcela
cintica pode ser considerado unitrio. Alm disso, empregando a relao de
disperso em guas profundas (3.16) e a equao da superfcie (3.10), podemos
reescrever (3.22) na forma:
Hidrodinmica I 70
) ( cos
2
1
4
2 2
2
t kx gA
gA
E
+ =
interessante tomarmos o valor mdio da energia ( E ) no decorrer de um
perodo de onda
36
(T) e, neste caso, chega-se a:
2
2 2
2
1
4 4
gA
gA gA
E
= + = (3.23)
Seguindo procedimento anlogo, possvel mostrar que a equao (3.23)
vale tambm para o caso mais geral de ondas em profundidade finita (a
demonstrao fica como exerccio) e, portanto, que a energia mdia de onda se
divide igualmente entre as parcelas cintica e potencial.
Podemos analisar tambm a velocidade com que a energia mdia de onda
transportada medida que a onda se propaga. Para tanto, determinaremos o
trabalho realizado pelo fluido. A figura abaixo mostra um plano vertical AA
perpendicular direo de propagao da onda. Consideraremos um elemento
desse plano com largura unitria e altura dz (destacado na figura):
Figura 19 Transporte de Energia
36
dt E
T
E
T t
t
+
=
1
Hidrodinmica I 71
O trabalho realizado pelo fluido que passa por este elemento dado pelo
produto entre a fora e a distncia, ou seja:
) . .( . 1 . dt u dz p dW =
e, portanto, o trabalho mdio realizado em um perodo de onda, ou a potncia,
dada por:
dt pudz
T
W
T t
t h
+
=
0
1
j considerando que a parcela entre z=0 e z= pode ser desprezada no contexto
da teoria linear de ondas. Empregando (3.19) e (3.17), a expresso acima resulta:
dt dz t kx z h k
kh kh T
A kg
dt dz t kx z h k z
kh T
A kg
W
T t
t h
T t
t h
+
+ +
+ + =
0
2 2
2 2
0 2
) ( cos ) ( cosh
cosh sinh
) cos( ) ( cosh
sinh
(3.24)
fcil perceber, no entanto, que o primeiro termo de (3.24) resulta nulo e
observando que:
h kh
k
dz z h k
h
2
1
2 sinh
4
1
) ( cosh
0
2
+ = +
chega-se a:
+ = h kh
k kh
gA
W
2
1
2 sinh
4
1
2 sinh
2
ou ainda, em termos da velocidade de fase ( k c = ):
+ =
kh
kh c
gA W
2 sinh
2
1
2 2
1
2
(3.25)
Velocidade de Grupo
A potncia mdia realizada em um ciclo de onda (3.25) pode ser tambm
escrita em termos da energia mdia:
g
c E W =
Hidrodinmica I 72
onde c
g
representa a velocidade com que a energia se propaga e chamada
velocidade de grupo (group velocity)
37
.
No caso mais geral de profundidade finita, a velocidade de grupo ,
portanto, dada por:
+ =
kh
kh c
c
g
2 sinh
2
1
2
(3.26)
Os limites assintticos so fceis de se verificar:
i) Em profunidade infinita ( kh ), a velocidade de grupo metade da
velocidade de fase:
2
c
c
g
=
ii) No limite de guas rasas , a velocidade de grupo coincide com
a prpria velocidade de fase:
) 0 ( kh
c c
g
=
Voltaremos a discutir o conceito de velocidade de grupo mais adiante, na
seo (3.5). Antes, contudo, discutiremos efeitos interessantes que ocorrem
quando ondas planas progressivas se propagam em regies de profundidade
varivel.
3.4. Efeitos de Profundidade Varivel
At o momento, a teoria apresentada considerou o problema de ondas em
profundidade constante. Estudaremos, agora, os efeitos previstos pela teoria linear
quando a onda se propaga em um local no qual a profundidade varia de forma
considervel em relao ao comprimento de onda. Talvez o exemplo mais claro
deste tipo de situao sejam as ondas que chegam a uma praia, provenientes de
alto-mar. Todavia, no caso de profundidade varivel, o perodo de onda (e,
37
A razo desta denominao ficar mais clara quando discutirmos a superposio de ondas, mais
adiante.
Hidrodinmica I 73
portanto, sua freqncia) a nica propriedade que se mantm inalterada. Alguns
fenmenos importantes como variaes na velocidade de fase e velocidade de
grupo podem ser inferidas a partir da teoria j apresentada nas sees
precedentes. Nesta seo, discutiremos aspectos importantes referentes a
variaes na altura de onda e no movimento do fluido e o chamado fenmeno de
refrao de ondas.
Variaes na Altura de Onda e no Movimento das Partculas Fluidas
A variao na altura de onda (H) induzida por variaes de profundidade
pode ser inferida considerando-se o princpio de conservao da energia de onda.
Assim, tomemos o exemplo ilustrado abaixo de uma onda que se propaga de uma
regio de grande profundidade para um local (praia) de profundidade decrescente.
hh
Figura 20 Propagao de Ondas em Profundidade Varivel
Suponhamos dois planos verticais perpendiculares frente de ondas, o
primeiro ainda em profundidade infinita e o segundo em uma profundidade
genrica h. Sabemos que a energia de onda entre os dois planos verticais deve
ser conservada e, portanto, os fluxos de energia atravs dos dois planos verticais
devem ser iguais. Assim, empregando o sub-ndice para indicar as
propriedades da onda em profundidade infinita, podemos escrever:
W
kh
kh c
gA
c
gA W =
+ = =
2 sinh
2
1
2 2
1
2 2
1
2 2
Hidrodinmica I 74
e, assim:
+
= =
kh
kh c
c
H
H
A
A
2 sinh
2
1
1
ou, a partir das relaes (3.16) e aps alguma lgebra, pode-se escrever:
+
= =
kh
kh
kh
H
H
A
A
2 sinh
2
1 tanh
1
(3.27)
Alm da variao na altura de onda, podemos inferir as variaes na
trajetria e velocidade das partculas fluidas. De fato, fcil verificar a partir das
equaes (3.17) e (3.18) que as relaes entre as amplitudes das componentes
de velocidade das partculas fluidas na superfcie mdia (z=0) so dadas por:
=
=
=
=
=
=
A
A
z w
z w
kh
kh
A
A
z u
z u
) 0 (
) 0 (
sinh
cosh
) 0 (
) 0 (
(3.28)
Percebe-se, portanto, que, enquanto a velocidade vertical aumenta na
proporo da altura de onda, a velocidade horizontal sofre um acrscimo muito
mais significativo medida que a profundidade de onda diminui. Isso traduz,
obviamente, um alongamento horizontal das trajetrias medida que a onda se
propaga para regies de menor profundidade. Esse efeito ilustrado na figura
abaixo, que mostra as variaes nas trajetrias para uma onda de comprimento
m 100 =
para diferentes valores de profundidade:
Figura 21 Efeitos de profundidade sobre as trajetrias das partculas fluidas
Hidrodinmica I 75
A figura a seguir apresenta as variaes de altura de onda (3.27) e
velocidade horizontal (3.28) em funo do parmetro adimensional
h .
Profundidade adimensional
h
Figura 22 Efeitos de profundidade sobre a altura de onda e velocidade do fluido
Algumas conseqncias prticas importantes podem ser discutidas luz
dos resultados apresentados acima. Inicialmente, observamos que a altura de
onda aumenta medida que a profundidade diminui. Ao mesmo tempo, porm,
sabemos que o comprimento de onda sofre uma reduo, acompanhando a
reduo na velocidade de fase da onda, uma vez que kh tanh =
.
38
Conseqentemente, a declividade da onda aumenta conforme a profundidade
diminui. H um limite de estabilidade da onda caracterizado por um valor mximo
de declividade, observvel experimentalmente, acima do qual a onda ir
quebrar
39
. Nesse limite, obviamente, efeitos no-lineares se tornam importantes,
fugindo do contexto da teoria linear. No entanto, os resultados acima identificam
38
Podemos entender o que ocorre medida que as ondas atingem a praia como uma
compactao do trem de ondas, com conseqente aumento de altura em funo da conservao
da energia de ondas.
39
Em guas profundas, esse limite dado aproximadamente por 14 . 0 = H
Hidrodinmica I 76
os fenmenos fsicos principais que explicam, por exemplo, o comportamento das
ondas do mar que incidem sobre uma praia.
interessante notar ainda que variaes significativas na altura de onda s
so previstas para profundidades muito baixas, tipicamente para 06 . 0 <
h e,
dessa forma, essa variao de pouco interesse no contexto da engenharia naval
e ocenica, muito embora seja importante, por exemplo, para a rea de
engenharia costeira. Por outro lado, a variao na velocidade horizontal do
escoamento mais significativa e encontra aplicaes importantes no estudo de
foras hidrodinmicas sobre plataformas fixas em regies de baixa profundidade,
por exemplo.
Por fim, os resultados da figura acima atestam, de forma grfica, que os
efeitos de profundidade sobre o campo de velocidades do escoamento e sobre o
perfil da onda so de fato desprezveis para 5 . 0 > h , valor usualmente
empregado como limite de validade da hiptese de profundidade infinita.
O Fenmeno de Refrao de Ondas
Suponhamos o caso de um trem de ondas planas que incide obliquamente
sobre uma praia de batimetria uniforme, ilustrado na figura abaixo.
praia
h1
h2
h3
cristas
direo da onda
praia
h1
h2
h3
cristas
direo da onda
Figura 23 Onda incidindo obliquamente em praia de batimetria uniforme
Hidrodinmica I 77
Como a velocidade de fase (que caracteriza a velocidade das cristas)
diminui com a profundidade, as regies das cristas localizadas em maior
profundidade se movero com velocidades maiores do que aquelas em
profundidades menores. Assim, o trem de ondas experimentar uma rotao,
alterando a sua direo medida que a onda se aproxima e tendendo a incidir
paralelamente linha da praia. A esse fenmeno de variao da direo do trem
de ondas d-se o nome de refrao
40
. Esse fenmeno explica, portanto, a
tendncia que observamos de as ondas incidirem de forma mais ou menos
paralela praia, independentemente da direo de propagao em alto mar.
3.5. Superposio de Ondas Planas
O princpio de superposio de ondas pode ser aplicado, por exemplo, para
modelar o problema de reflexo de ondas. O caso mais simples o de uma onda
plana com amplitude A e freqncia que incide sobre uma parede vertical. Essa
parede reflete integralmente a energia de onda incidente. Nesse caso, portanto, o
sistema de ondas final ser composto por duas componentes harmnicas de
mesma freqncia, mas que se propagam em direes opostas:
t kx A t kx A t kx A t x cos cos 2 ) cos( ) cos( ) , ( = + + = (3.29)
e o potencial, no caso de guas profundas, ser dado por:
t kx e
gA
t z x
kz
sin cos
2
) , , ( = (3.30)
Percebe-se, assim, que a onda gerada na superfcie atravs da superposio
das ondas incidente e refletida ter amplitude mxima igual ao dobro da amplitude
40
Do latim re-frangere, que significa mudar de direo.
Hidrodinmica I 78
de onda incidente. Alm disso, esta onda no se caracteriza como uma onda
progressiva, sendo conhecida como onda estacionria (em ingls, standing
wave). fcil verificar que existem infinitos pontos na superfcie
,.. 5 , 3 , 1 ;
2
1
= = n
k
n x
nos quais a amplitude de onda sempre nula no decorrer do
tempo. Estes pontos, assim como os pontos de amplitude mxima, so fixos no
tempo e da decorre a denominao onda estacionria. A figura abaixo
apresenta uma superposio de fotografias de uma onda estacionria obtida em
tanque de provas. interessante observar que as trajetrias das partculas fluidas
de uma onda estacionria no correspondem a rbitas fechadas como no caso de
ondas progressivas.
Figura 24 Movimento do Fluido sob uma Onda Estacionria. (fonte: Newman,1977)
Em engenharia naval este tipo de onda surge, por exemplo, no movimento do
lquido contido no interior de tanques de embarcaes parcialmente cheios,
fenmeno conhecido como sloshing, embora, neste caso, efeitos de profundidade
finita devam ser incorporados. Ondas estacionrias tambm se podem se fazer
presentes em moonpools de sistemas ocenicos.
No caso de ondas que incidem sobre uma praia (a qual absorver parte da
energia de onda incidente) ou sobre um navio (o qual ir refletir parcialmente a
energia de onda, permitindo a transmisso da energia restante), a amplitude da
onda refletida ser reduzida. A razo entre a amplitude de onda refletida e a
amplitude de onda incidente (A) define o chamado coeficiente de reflexo (C
R
).
Hidrodinmica I 79
Assim, no caso bidimensional, o campo de ondas composto pela onda incidente e
pela onda refletida pode ser escrito
41
:
(3.31) ] Re[ ) , (
t i ikx
R
t i ikx
e C e A t x
+ +
+ =
Em um tanque de provas, quer seja ele dotado de absoro passiva (praia)
ou de algum sistema ativo de absoro de ondas, comum a presena de ondas
refletidas nas prprias extremidades do tanque ou por um modelo presente no
tanque. Geralmente essas ondas so de pequena amplitude e se fazem notar na
forma de uma modulao de amplitude do campo de ondas incidente. De fato,
(3.11) pode ser reescrita na forma:
(3.32) )] 1 ( Re[ ) , (
2kx i
R
t i ikx
e C e A t x + =
+
onde o termo entre parnteses denota a variao de amplitude, que oscila em x
com metade do comprimento de onda incidente (ou com o dobro do nmero de
onda). Com o auxlio de (3.32), o coeficiente de reflexo de ondas regulares de um
tanque de provas pode ento ser medido atravs da monitorao da amplitude de
onda em dois ou mais pontos ao longo da direo de propagao.
Atravs da superposio de ondas podemos tambm realizar uma
interpretao alternativa do conceito de velocidade de grupo. Imaginemos, ento,
a superposio de duas ondas harmnicas de mesma amplitude e com
freqncias prximas e correspondentes nmeros de onda k k , as
quais se propagam na mesma direo, sendo que 1 << (e, portanto,
1 << k k ). A elevao da superfcie ser dada por:
] ) ( ) cos[( ] ) ( ) cos[( ) , ( t x k k A t x k k A t x + + + =
e a expresso acima pode ser reescrita na forma:
) cos( 2 ) , (
) cos( ) , ( ) , (
t kx A t x
t kx t x t x
=
=
(3.33)
41
Adotaremos a notao complexa, pois a fase da onda refletida pode ser diferente de zero e,
nesse caso, o coeficiente de reflexo assume valores complexos.
Hidrodinmica I 80
A funo ) , ( t x uma funo de modulao, conhecida como envoltria,
cujo perodo 2 e comprimento de onda k 2 so muito maiores do que os
respectivos perodos e comprimentos das componentes harmnicas que se
sobrepem. Para ilustrar tal modulao, a figura da pgina seguinte apresenta a
elevao da superfcie para o caso em que A=1, 1 = e 20 1 = , em
diferentes instantes de tempo (verifique que, para 1 << , 2 k k ). O
perfil apresentado conhecido como batimento e tpico das ondas observadas
na superfcie do mar. Na figura (a) esto indicados os comprimentos das
componentes harmnicas (aproximadamente k 2 ) e da modulao ( k 2 ).
Sabemos que as velocidades de fase das duas componentes
harmnicas so praticamente iguais e podem ser dadas, aproximadamente, por
k c = . Todavia, a envoltria se propaga com uma velocidade k c
g
= , a qual,
no limite em que 0 k , pode ser definida como:
dk
d
c
g
= (3.34)
A velocidade de grupo, portanto, corresponde tambm velocidade com
que o pacote ou grupo de ondas se propaga (da seu nome). Para ilustrar este
fato, na figura abaixo esto indicados dois pontos: o ponto denotado por o se
desloca no tempo com a velocidade de grupo do sistema, enquanto o ponto
denotado por se propaga com a velocidade de fase da onda. Percebe-se que
as componentes de onda se movem mais rapidamente, se deslocando atravs dos
pacotes de onda.
Hidrodinmica I 81
0 100 200 300 400 500 600 700 800
-4
-3
-2
-1
0
1
2
3
4
x1
t=0 s
0 100 200 300 400 500 600 700 800
-4
-3
-2
-1
0
1
2
3
4
x1
t=15 s
0 100 200 300 400 500 600 700 800
-4
-3
-2
-1
0
1
2
3
4
x1
t=45 s
(x,t)
2/k
2/k
Figura 25 Composio de ondas de freqncias prximas em diferentes instantes de
tempo
Hidrodinmica I 82
Algumas observaes interessantes podem ser feitas a partir dos
resultados acima: A figura a seguir, extrada de Newman (1977), apresenta um
conjunto de imagens seqenciais de um trem de ondas gerado em tanque de
provas. O eixo das abscissas representa a posio ao longo do tanque. Cada
imagem representa uma fotografia da superfcie do tanque em um determinado
instante de tempo, avanando no sentido vertical (de cima para baixo). As ondas
se propagam da esquerda para a direita (batedor de ondas esquerda). A
profundidade do tanque suficiente para que se desconsiderem efeitos de fundo.
Figura 26 Velocidade de Fase e Velocidade de Grupo (fonte:Newman,1977)
As duas linhas indicadas como group velocity indicam o deslocamento da
frente de onda e do final do trem de onda, como vistos no tanque, os quais se
movem com a velocidade de grupo da onda. A linha indicada por phase velocity
acompanha o deslocamento de uma crista de onda, que, obviamente, se propaga
com a velocidade de fase. Como a velocidade de fase maior do que a
velocidade de grupo, o que ocorre que as cristas de onda parecem morrer na
Hidrodinmica I 83
frente do trem de ondas, enquanto ondulaes surgem na superfcie ao final do
mesmo.
Um outro ponto interessante: os perodos tpicos das ondas do mar se situam
por volta de 4 a 12 segundos. O perodo das ondas representado nas figuras da
pgina anterior de 6.28 segundos, portanto tpico. Os surfistas costumam ter
como regra a afirmao de que, em um swell, uma onda grande chega a cada
trs ondas. De fato, tal regra emprica apresenta uma certa consistncia com a
teoria, o que pode ser confirmado ao se observar os batimentos apresentados
anteriormente.
Por fim, cabe destacar que a superposio de ondas harmnicas em seu caso
mais geral, com componentes de diferentes amplitudes, freqncias e, muitas
vezes, direes de propagao, constitui a tcnica bsica para a modelagem
estatstica das ondas do mar, que ser discutida em detalhes nas prximas
sees.
3.6. Ondas Irregulares
Dentre os diferentes fenmenos fsicos responsveis por induzir efeitos
ondulatrios no ambiente martimo, encontramos a gerao de ondas causada
pela ao do vento sobre a superfcie do mar. As ondas de superfcie originadas
por esta ao so aquelas que apresentam maior interesse no contexto da
engenharia naval e ocenica, uma vez que apresentam perodos e amplitudes
tpicas capazes excitar de forma significativa a dinmica de navios ou sistemas
ocenicos usuais. Estas ondas freqentemente apresentam carter bastante
aleatrio, com perodos e alturas de ondas variando continuamente com o tempo
e, muitas vezes, com ondas se propagando em diferentes direes. Essa
aleatoriedade nos obriga, ento, a uma modelagem estatstica das ondas do mar,
com o intuito de extrairmos informaes importantes sobre os efeitos causados
por diferentes estados de mar sobre navios ou sistemas ocenicos.
Hidrodinmica I 84
Atualmente, existem diversas bases de dados com informaes estatsticas
das ondas de mar para diferentes regies do globo. Estas bases foram
construdas ao longo dos anos com base em registros de ondas dos diferentes
locais, os quais podem ser obtidos por diferentes meios. Originalmente,
informaes sobre as ondas eram quase que exclusivamente baseadas em
observaes visuais reportadas pelas tripulaes das embarcaes. Hoje, h
diversos meios, muito mais precisos, para a inferncia estatstica das ondas do
mar em determinado local. O mtodo mais difundido consiste na utilizao das
chamadas bias oceanogrficas, mas alternativas se tornam cada vez mais
difundidas como, por exemplo, a medio de ondas atravs de radares.
A figura abaixo apresenta um trecho tpico de um registro de ondas do mar.
Figura 27 Trecho de Srie Temporal de um Registro de Ondas
Quando este tipo de registro se encontra disponvel, uma anlise
simplificada suficiente para obtermos informaes estatsticas importantes. Via
de regra, considera-se que o tempo de registro deve ser pelo menos 100 vezes
maior do que o maior perodo de ondas registrado para garantir uma base
estatstica confivel. A seguir, discutiremos alguns dos parmetros estatsticos
mais importantes para a descrio das ondas do mar.
Nosso objetivo, por enquanto, introduzir alguns parmetros estatsticos
fundamentais atravs de um exemplo numrico e um tratamento simplificado.
Hidrodinmica I 85
Perodo Mdio de Ondas
O perodo mdio de ondas T (average wave period) pode ser obtido
facilmente a partir de um registro como a mdia dos perodos entre zeros
ascendentes (average zero up-crossing period) ou dos perodos entre cristas ou
cavas sucessivas.
Estatsticas de Altura de Ondas
De um modo bem simplificado, a altura mdia de ondas pode ser obtida
com base em um histograma contendo as informaes do nmero de ocorrncias
dentro de determinadas faixas de alturas de ondas. A razo entre o nmero de
ocorrncias em cada faixa e o nmero total de ciclos contido no registro fornece
quocientes de freqncia que caracterizam a chamada funo densidade de
probabilidade f(x) (probability density function). A soma cumulativa destes
quocientes fornece, por fim, a chamada funo de distribuio F(x) (distribution
function) das alturas de onda.
Um exemplo numrico fornecido abaixo, para um registro de 150 ciclos:
Os resultados acima so apresentados graficamente na figura abaixo. A
funo densidade de probabilidade se apresenta na forma de um histograma (a).
A funo de distribuio dada em (b).
Hidrodinmica I 86
Figura 28 Funo Densidade de Probabilidade e Funo de Distribuio de Alturas de
Ondas
Informaes estatsticas importantes podem ser obtidas a partir da funo
f(x). Por exemplo, a probabilidade de que a altura de onda no registro exceda um
certo valor a dada simplesmente por:
(3.35)
= >
a
w
dx x f a H P ) ( }
~
{
Como exemplo, fcil verificar no caso acima que a probabilidade de a
altura de onda exceder 3.25 m de 4%.
A altura mdia de ondas H (mean wave height) dada por:
=
0
) ( . dx x f x H (3.36)
e, no caso acima, 64 . 1 = H m.
Um parmetro importante normalmente empregado para a descrio de um
determinado estado de mar a chamada altura significativa de ondas H
1/3
Hidrodinmica I 87
(significant wave height)
42
. A altura significativa definida como a mdias das
ondas 1/3 maiores. Assim, dividindo-se a rea do histograma da funo f(x) em
trs partes iguais e denotando por a
0
o limite inferior do tero mais direita, a
altura significativa ser dada por:
=
0
) ( .
3 / 1
a
dx x f x H
No exemplo numrico acima, a altura significativa dada pela mdia das 50
maiores ondas no registro e, portanto, 51 . 2
3 / 1
= H m.
3.6.1. A Estatstica das Ondas do Mar
Para um tratamento estatstico mais apropriado, uma anlise mais completa
do registro de ondas se faz necessria. Neste caso, uma amostragem (sampling)
da elevao da superfcie ser realizada a partir de um nmero grande (N) de
registros tomados a intervalos de tempo iguais ( t ), conforme ilustrado na figura
abaixo.
Figura 29 Amostragem de um registro de ondas.
42
A razo para o emprego da altura significativa como parmetro estatstico tem origem histrica.
Estudos mostraram que um observador bem treinado tende a fornecer como a altura caracterstica
de ondas irregulares um valor que se aproxima muito de H
1/3
. Assim, dada a importncia j
Hidrodinmica I 88
O tempo total do registro dado por T=N t e a freqncia de amostragem
(sampling frequency) dada por t f
S
=1 . Na anlise das ondas do mar,
usualmente se utilizam registros que variam de 15 a 20 minutos de aquisio, com
freqncia de amostragem tpica por volta de 2 Hz. A menos na condio de um
swell muito longo, esses tempos de registro so altos o suficiente para garantir a
aquisio de um nmero mnimo de ciclos de ondas, mas ainda baixos o suficiente
para evitar a influncia espria de fenmenos de baixa freqncia, como a
variao dos nveis de mar.
Atravs da amostragem, gera-se uma srie com N valores da elevao
n
medida a cada intervalo de tempo.
Irregularidade do Mar e Gaussianeidade
A anlise de registros de ondas obtidos em campo demonstra que a funo
densidade de probabilidade da srie discreta de elevao da superfcie
n
muito
bem reproduzida por uma distribuio Gaussiana (ou normal). Como
n
representa a oscilao da superfcie em torno de seu valor indeformado, bvio
que sua mdia nula. Assim, a funo densidade de probabilidade de
n
pode
ser representada por uma distribuio normal de mdia nula e desvio-padro :
2
2
2
2
1
) (
= e f (3.37)
sendo o desvio-padro dado por:
=
N
n
n
N
1
2
1
1
(3.38)
Uma distribuio Gaussiana plenamente caracterizada por dois
parmetros: sua mdia (no caso nula) e seu desvio-padro. A figura abaixo
ressaltada das inferncias visuais como fonte original para as estatsticas de ondas do mar, a
altura significativa passou a ser um parmetro usual na modelagem.
Hidrodinmica I 89
apresenta a representao grfica de uma distribuio Gaussiana com mdia nula
e desvio-padro 1 = .
Figura 30 Distribuio Normal ou Gaussiana com mdia nula e 1 = .
Percebe-se que os pontos de inflexo da distribuio so dados por
= x . Em uma distribuio normal, a probabilidade de que a varivel aleatria
exceda um certo valor a dada por:
= = >
a a
d e d f a P
2
2
2
2
1
) ( } { (3.39)
A probabilidade de que a varivel seja maior do que o desvio-padro de
aproximadamente 32%, ou seja 32 . 0 } { = > P , enquanto que a probabilidade de
exceder um valor equivalente a 3 de apenas 0.3% ( 003 . 0 } 3 { = > P ).
A razo da Gaussianeidade de ) ( f pode ser melhor entendida se nos
remetermos ao processo de gerao das ondas aleatrias. Estas ondas so
resultantes da composio de vrias componentes causadas pela ao do vento
em diferentes locais da superfcie do mar. A ao do vento em regies diferentes
ocorre de maneira independente e, assim, as ondas irregulares podem ser
entendidas como a soma de variveis independentes. Sabe-se, a partir do
Hidrodinmica I 90
Teorema do Limite Central, que a distribuio de probabilidade de uma varivel
aleatria composta pela superposio de variveis independentes Gaussiana,
independentemente da forma das distribuies de probabilidade das variveis
originais. Esse resultado, de fato, constitui a razo fundamental da importncia da
distribuio normal na teoria da probabilidade.
As propriedades matemticas das distribuies Gaussianas podem ser
encontradas em qualquer texto sobre variveis aleatrias. Uma propriedade em
especial muito importante no contexto do estudo de comportamento no mar e,
portanto, merece ser destacada: Uma operao linear sobre uma varivel
Gaussiana preserva a Gaussianeidade do processo. Em outras palavras, se X
uma varivel aleatria com distribuio Gaussiana, mdia e varincia , ento
a varivel
2
b aX Y + = tambm ter distribuio Gaussiana com mdia b a + e
varincia . Dessa forma, se pudermos supor que a dinmica de um sistema
ocenico sob ao de ondas irregulares linear na amplitude de onda, a resposta
do sistema ser necessariamente Gaussiana na medida que
2 2
a
) (t tambm o .
Essa questo ser fundamental para o estudo estatstico da resposta do sistema
em um mar cuja estatstica conhecida, ponto que ser retomado no prximo
Captulo.
Distribuio de Rayleigh das Amplitudes
Se a faixa de freqncias em um estado de mar no for muito ampla, o
espectro dito de banda estreita. Faremos uma anlise mais detalhada quanto
largura de banda do espectro mais adiante. No momento, nos basta observar que
a boa parte dos estados de mar de interesse pode ser caracterizada como
espectros de banda estreita. Nesse caso, e como a distribuio de probabilidade
da elevao Gaussiana, possvel mostrar que a estatstica de amplitudes (ou
Hidrodinmica I 91
alturas) de ondas seguir uma distribuio de Rayleigh
43
. Esta distribuio
dada por:
2
2
2
2
) (
A
e
A
A f
= (3.40)
De acordo com esta distribuio, a probabilidade de que a amplitude A
exceda um determinado valor a dada por:
2
2
2
2
2 2
2
1
) ( } {
a
a
A
a
e dA Ae dA A f a A P
= = = >
(3.41)
O valor mdio das amplitudes que excedem o valor a pode ser visualizado,
graficamente, como a coordenada x do baricentro da rea hachurada na figura
abaixo:
Figura 31 Distribuio de Rayleigh
Por definio, a amplitude significativa dada pela mdia das amplitudes
1/3 maiores:
=
0
) ( .
3 / 1
a
dA A f A A
sendo: 3 / 1 } {
2
2
0
2
0
= = >
a
e a A P
43
A demonstrao matemtica deste fato pode ser encontrada, por exemplo, em Price & Bishop
(1974).
Hidrodinmica I 92
e, portanto, a
0
= 1.4823.
Assim, fcil verificar que:
4
2
3 / 1
3 / 1
H
A
(3.42)
A expresso (3.41) pode ser reescrita em termos das alturas de onda na
forma:
2
2
3 / 1
} {
= >
H
h
e h H P (3.43)
que indica a probabilidade de a altura de onda exceder um certo valor h em um
mar com altura significativa H
1/3
.
Um parmetro normalmente empregado na anlise dinmica de sistemas
ocenicos a mxima altura de onda (maximum wave height) esperada em um
estado de mar. Por conveno, esta altura calculada como sendo aquela cuja
probabilidade de ser excedida 1/1000. Esse valor, aparentemente arbitrrio, foi
definido considerando-se que um estado de mar tpico tem durao aproximada
de 3 horas (tempo caracterstico de uma tempestade) e contm, grosso modo, um
nmero de ciclos de ondas prximo de 1000. Segundo esta conveno, a mxima
altura de onda H
MAX
pode ser calculada em funo de H
1/3
por intermdio de
(3.43):
(3.44)
3 / 1
86 . 1 H H
MAX
=
At o momento, nos preocupamos em derivar parmetros estatsticos
importantes que podem ser obtidos a partir de registros de ondas. Para um
enfoque estatstico da resposta de sistemas ocenicos, todavia, ainda
necessrio que caracterizemos de forma mais precisa o que entendemos por
estados de mar. No projeto de sistemas ocenicos, as anlises dinmicas so
realizadas com base em estados de mar tpicos da regio na qual o sistema ir
operar. As caractersticas do mar em uma dada regio so obtidas atravs de
anlises estatsticas de longo prazo e a representao de seus diferentes
Hidrodinmica I 93
estados feita atravs do espectro de energia de ondas. Essa representao ser
discutida em detalhes a seguir.
3.6.2. Espectro de Energia das Ondas do Mar
Caracterizao do Mar
Denotemos por ) , (
1
t x
r
o registro de ondas obtido em uma posio arbitrria
1
x
r
. Se pudermos distinguir uma direo nica de propagao de forma que toda a
irregularidade da onda se manifeste nesta direo, o mar chamado de swell ou
de cristas-longas (long-crested sea). Neste tipo de mar, considera-se que,
embora a amplitude e o espaamento das cristas varie com o tempo, as ondas
permanecem paralelas.
Em um mar de cristas-longas, dada a sua homogeneidade espacial, o
registro realizado na posio
1
x
r
( ) , (
1
t x
r
) e um outro registro realizado na posio
2
x
r
( ) , (
2
t x
r
) sero processos aleatrios caracterizados pelas mesmas relaes
estatsticas. Em outras palavras, embora a histria da elevao da superfcie
possa ser diferente, a estatstica do mar independe da posio de medida e o mar
pode ser caracterizado exclusivamente com base em sua variao temporal ) (t .
Conseqentemente, a estatstica do mar pode ser dada com base apenas na
freqncia de onda e em sua amplitude.
Por outro lado, se as ondas do mar se propagam no em uma direo
nica, mas sim com uma certa disperso angular, o mar chamado de mar local
ou de cristas-curtas (short-crested sea). Este tipo de situao ocorre,
tipicamente, quando observamos o mar prximo a ou no prprio local de sua
gerao (tempestade), da o nome mar local. Neste caso, difcil identificar as
cristas das ondas e o mar se mostra confuso. A posio de registro do mar
agora importante e a estatstica depender no apenas do tempo, mas tambm da
posio ) , ( t x
r
. Nesta situao, a estatstica do mar dever ser descrita no
Hidrodinmica I 94
apenas em funo da freqncia, mas tambm em funo da direo. Os
espectros de mar que caracterizam mares short-crested so conhecidos como
espectros direcionais e normalmente so parametrizados por uma medida de
espalhamento direcional ().
Podemos representar esquematicamente as diferenas entre um swell e um
mar local atravs de grficos de contorno (contour plots) de seus espectros de
energia (cuja definio, daremos a seguir). Por ora, basta perceber que os
espectros de mar-local apresentam distribuio em uma larga faixa de direes
(ou um maior espalhamento), enquanto os espectros que caracterizam um swell
apresentam espalhamento pequeno e, portanto, na prtica, so considerados
unidirecionais.
Figura 32 Diferena de espalhamento de um mar local (a) e um swell (b). Fonte: Price &
Bishop (1974).
importante mencionar, por fim, que um mar real comumente formado
pela composio de diferentes mares, por exemplo, pela composio de um swell
e um mar local, geralmente se propagando em direes distintas. Nesse caso, o
espectro de energia do mar ser caracterizado por mais de um pico de energia.
A seguir, discutiremos a definio de espectro considerando o caso mais
simples, de mar unidirecional (long-crested). Na seo 3.6.4 discutiremos, de
forma breve, a representao espectral de mares com espalhamento direcional
(short-crested).
Hidrodinmica I 95
Superposio de Ondas e Espectro de Energia
As ondas irregulares do mar podem ser representadas atravs da
superposio de ondas regulares de diferentes amplitudes e freqncias. O
procedimento clssico para se obter o contedo de freqncia de um certo sinal
aleatrio decomp-lo em uma srie de Fourier
44
.
Suponhamos ento um certo registro de onda ) (t com tempo total de
medio T. Definindo:
=
=
j
T
j
2
a srie de Fourier do sinal ser dada por:
(3.45)
= + =
1 1
) (
] sin cos [ ) (
j j
t i
j j j j j
j j
e A t s t c t
onde, obviamente:
) arctan(
2 2
j j j
j j j
c s
s c A
=
+ =
Os coeficientes A
j
representam a amplitude de cada uma das componentes
harmnicas e os coeficientes
j
suas respectivas fases.
Os coeficientes de Fourier so definidos por:
=
=
T
j j
T
j j
dt t t
T
s
dt t t
T
c
0
0
. sin ) (
2
. cos ) (
2
(3.46)
Como ) (t Gaussiano de mdia nula, os coeficientes de Fourier tambm
o sero. Portanto, a amplitude (A
j
) segue a distribuio de Rayleigh e a fase
j
uniformemente distribuda no intervalo
j
.
44
Maiores detalhes podem ser encontrados, por exemplo, em Price & Bishop (1974).
Hidrodinmica I 96
Uma vez que estamos interessados apenas na estatstica e no em
reproduzir a real elevao da superfcie em dado instante de tempo t, as fases
j
entre as componentes harmnicas podem ser desconsideradas.
Uma medida da densidade de energia das ondas do mar em torno de uma
dada freqncia
n
dada por:
n
n
n n
A S
2
2
1 1
) ( (3.47)
Deve-se observar que, se multiplicada por g, a expresso acima fornece o
valor mdio da energia por unidade de rea das ondas na faixa de freqncias
(ver eq. 3.23).
No limite em que 0 , tem-se:
2
2
1
). (
n n
A d S =
(3.48)
e a funo ) (
S assim definida conhecida como densidade espectral ou
simplesmente espectro de energia das ondas. A figura abaixo ilustra as
definies acima.
Figura 33 Definio de Densidade Espectral
Por definio, a varincia do sinal ) (t tambm pode ser dada a partir de
seu espectro de energia, na forma:
Hidrodinmica I 97
(3.49)
=
0
2
). (
d S
n
A figura abaixo fornece uma interpretao grfica do significado fsico do
espectro de ondas e de como ele se relaciona com o registro de ondas original.
Figura 34 Representao esquemtica da relao entre o espectro de energia e o registro
de ondas original
Em unidades SI, o espectro ) (
S tem unidade de m
2
s e pode ser
representado tambm em termos da freqncia de onda em Hertz ( ). Nesse
caso, porm, convm observar que o espectro sofre uma transformao. O
requisito a ser seguido impe que a energia total contida nos intervalos
f
e
seja igual, e, portanto: f
df f S d S ). ( ). (
=
e, como 2 = df d :
2
) (
) (
f S
S = (3.50)
Hidrodinmica I 98
A relao (3.50) permite converter a representao do espectro da
freqncia para a freqncia angular e vice-versa. A figura abaixo ilustra a
representao de um espectro de mar tpico nas duas bases diferentes.
Figura 35 Espectro de Mar em termos de (rad/s) e f (Hz)
Parmetros Estatsticos Importantes
Como veremos, uma srie de parmetros estatsticos importantes pode ser
derivada a partir dos chamados momentos espectrais, definidos por:
(3.51)
=
0
). (
d S m
k
k
onde o sub-ndice k denota o momento k-sima ordem.
fcil verificar, a partir de (3.49) e (3.51), que a varincia da elevao ) (t
corresponde ao momento espectral de ordem zero (m
0
). O desvio-padro do sinal
de elevao da superfcie ento dado por:
2 / 1
0
0
). (
= = =
d S m RMS (3.52)
Atravs da expresso (3.42), pode-se relacionar tambm o momento m
0
com a amplitude (ou com a altura) significativa de onda na forma:
Hidrodinmica I 99
0 3 / 1
0 3 / 1
4
2
m H
m A
=
=
(3.53)
Dois perodos caractersticos importantes so relacionados aos momentos
de primeira e segunda-ordem. De fato, o momento de 1 ordem (m
1
) permite
estimar a freqncia do baricentro do espectro atravs da relao
0 1 1
m m = e,
assim, o perodo (T
1
) dado por:
1
0
1
2
m
m
T = (3.54)
conhecido como perodo central do espectro (mean centroid wave period).
O momento de 2 ordem, por sua vez, fornece uma estimativa do momento
de inrcia de rea do espectro. Esse momento pode ser escrito como ,
onde a freqncia
0
2
2 2
m m =
2
faz o papel de raio de girao. O perodo associado, dado
por:
2
0
2
2
m
m
T = (3.55)
chamado perodo mdio entre zeros (mean zero-crossing wave period). Muitas
vezes esse perodo aparece na literatura denotado por T
z
.
Como veremos na prxima seo, outro perodo caracterstico importante
o perodo de mxima energia do espectro ou seu perodo de pico (T
p
). Este, por
sua vez, se relacionar com o perodo central e com o perodo entre zeros
dependendo da forma do espectro de energia.
A energia de onda se distribui em torno da freqncia central
1
em uma
faixa de freqncias da ordem . Podemos definir a largura de banda do
espectro como sendo
1
/ = e . Se 1 << e , o espectro dito de banda estreita.
Neste caso, o mar quase harmnico. Se, por outro lado, e for prximo de 1 ou
Hidrodinmica I 100
maior, dizemos que o espectro de banda larga. Uma definio usualmente
aceita para a largura de banda em funo dos momentos espectrais
45
:
4 0
2
2
1
m m
m
e = (3.56)
A influncia do Tempo de Registro
A forma do espectro e os valores estatsticos dependero, como vimos, do
tempo total de registro de onda (T). A durao do registro tambm pode ser
caracterizada pelo nmero total de ciclos de ondas que ele contm (N). Como
discutimos no incio desta seo, h um valor adequado para N que define uma
base estatstica apropriada para a anlise espectral. Valores de N muito baixos
obviamente prejudicam as estatsticas, enquanto valores muito altos tambm
podem corromper a anlise ao incorporar variaes esprias da superfcie
(como, por exemplo, variaes de mar).
A figura abaixo foi extrada de um estudo da ITTC (International Towing
Tank Conference) e ilustra a variao de alguns parmetros estatsticos
significativos em funo do nmero de ciclos empregado na anlise. Os resultados
da figura apresentam a razo entre o valor calculado com registros de diferentes
durao e aquele calculado com um grande nmero de ciclos. Esse estudo foi
realizado com um mar de perodo central T
1
aproximadamente igual a 6 segundos.
possvel observar que, para N>50, as razes se mostram mais ou menos
constantes, indicando que um nmero muito maior de ciclos seria necessrio para
garantir a convergncia.
45
Para maiores detalhes quanto a essa deduo, ver Price & Bishop (1974), seo 9.6.2.
Hidrodinmica I 101
Figura 36 Efeito do tempo de registro sobre as estatsticas
De acordo com as recomendaes da 17 ITTC (1984), o valor N=50 deve
ser adotado com um limite inferior para a anlise espectral de um determinado
estado de mar. Atualmente, o valor N=100 usualmente adotado com padro e
N=200 considerado excelent practice pela ITTC. Na prtica, um registro com
durao 100 vezes maior do que o maior perodo esperado considerado um
procedimento-padro. Para mares tpicos, isso significa tempos de registro entre
15 e 20 minutos, conforme dissemos no incio deste Captulo.
3.6.3. Espectros de Energia Padro
Vrios estudos foram realizados, especialmente a partir da dcada de 1960,
com o intuito de relacionar as ondas do mar e as caractersticas do vento que as
gera, dando origem chamada teoria de gerao das ondas do mar. Alguns
aspectos dessa teoria sero apresentados, de forma breve, na prxima seo.
Esses estudos incentivaram vrias tentativas de se correlacionar a velocidade de
vento com o espectro de ondas do mar gerado.
Miles (1960) e Phillips (1966) mostraram que existe uma relao entre a
presso aerodinmica na zona de gerao e a freqncia das ondas geradas. As
ondas mais curtas (freqncias mais altas) crescem at que se tornam instveis e
Hidrodinmica I 102
quebram e, dessa forma, a energia do mar em altas freqncias passa a ser
limitada por essa dissipao.
Se existir uma pista (fetch) suficientemente longa para a ao do vento
sobre a superfcie, e o vento soprar por um tempo igualmente suficiente, o mar
gerado atingir uma situao de equilbrio. Nesta situao, o mar chamado de
plenamente desenvolvido (fully developed seas). O espectro de energia de um
mar plenamente desenvolvido atinge um mximo (pico) em uma freqncia
p
que
inversamente proporcional velocidade do vento. Este fato pode ser melhor
entendido se considerarmos, como argumento fsico, que na situao de equilbrio
a velocidade do vento dever igualar uma velocidade de grupo tpica (
p
g 2 / ), a
qual caracteriza a velocidade com que a energia das ondas se propaga.
Atravs de um argumento dimensional, Phillips (1966) demonstra que no
limite de altas freqncias deve-se ter:
5
2
) (
g
S ( ) (3.57)
Desde ento, vrios formatos padronizados foram propostos para ) (
S
em funo da velocidade do vento. Exemplos so o espectro de ondas de
Darbyshire, o espectro de ondas do British Towing Tank Panel e o espectro de
ondas de Neumann, os quais, atualmente, se encontram em desuso
46
.
Dois formatos padronizados de espectro so os mais comumente
empregados nos dias atuais e, por essa razo, sero discutidos em maiores
detalhes a seguir.
O Espectro de Pierson-Moskowitz
O espectro original proposto por Pierson & Moskowitz (1963) foi obtido de
forma semi-emprica com base na anlise de um grande nmero de registros de
ondas do Atlntico Norte. Por terem sido realizados em uma regio aberta,
46
Maiores informaes podem ser encontradas em Price & Bishop (1974).
Hidrodinmica I 103
supostamente estes registros se referem, em sua maioria, a mares plenamente
desenvolvidos. O espectro original era dado por:
=
4
5
2
74 . 0 exp
0081 . 0
) (
gV g
S (3.58)
onde V a velocidade mdia do vento medido a uma altura de 19.5 metros.
Posteriormente, algumas modificaes foram propostas e o espectro
passou a ser aceito com o seguinte formato:
=
4 5
exp ) (
B A
S (3.59)
A ITTC de 1969 props uma representao baseada em apenas um
parmetro, a altura significativa H
1/3
. Recomendou que se adotassem os seguintes
valores para as constantes A e B:
2
3 / 1
2
11 . 3
0081 . 0
H
B
g A
=
=
Em 1967, a ISSC (International Ship Structures Congress) recomendou, por
sua vez, a adoo de dois parmetros como base para a representao do
espectro, a altura significativa e o perodo central T
1
. Nesse caso:
4
1
4
1
2
3 / 1
692
173
T
B
T
H
A
=
=
O espectro sugerido pela ISSC tambm conhecido como espectro de
Bretschneider e , hoje em dia, a forma mais usual de emprego do espectro de
Pierson-Moskowitz. Para esta forma de espectro, as seguintes relaes tericas
podem ser obtidas para os perodos caractersticos:
(3.60)
2 1
407 . 1 296 . 1 T T T
p
= =
Deve-se observar que os espectro proposto pela ISSC recai naquele
proposto pela ITTC quando
3 / 1 1
86 . 3 H T = , uma relao que est de acordo com
os resultados originais analisados por Pierson e Moskowitz. De fato, alguns
Hidrodinmica I 104
pesquisadores argumentam que a representao por dois parmetros distintos
apresenta o inconveniente de permitir uma utilizao imprpria da formulao,
uma vez que existe uma relao terica entre ambos que deve ser preservada.
O Espectro de JONSWAP
Entre 1968 e 1969 um extenso programa de monitorao de ondas,
conhecido como Joint North Sea Wave Project (JONSWAP), foi conduzido no Mar
do Norte ao longo de uma linha de 100 milhas com origem na ilha Sylt (costa
noroeste da Alemanha). A anlise dos dados resultou na proposta de um formato
de espectro para mares gerados em pistas limitadas (fetch-limited) ou costeiros.
A 17 ITTC (1984) recomenda a seguinte definio do espectro de
JONSWAP para mares com pista limitada:
A
p p
T T
H
S
=
4
4
5
4
2
3 / 1
1950
exp
. 320
) ( (3.61)
com:
=
=
2
2
1
exp
3 . 3
p
A
e a constante assume diferentes valores dependendo de :
= 0.07 (se
p
< )
= 0.09 (se
p
> )
A relao entre os perodos caractersticos para o espectro (3.61) dada
por:
(3.62)
2 1
287 . 1 199 . 1 T T T
p
= =
O parmetro conhecido como peakedness factor. Muitas vezes, o
espectro de JONSWAP empregado tendo como terceiro parmetro o valor de .
Hidrodinmica I 105
importante mencionar que o espectro (3.61) recupera o espectro de
Bretschneider ao se considerar . 522 . 1 =
A
Comparao entre os Espectros
A figura abaixo apresenta uma comparao entre os espectros de onda de
Bretschneider e JONSWAP para mares com altura significativa de 4 metros e
perodos de pico de 6, 8 e 10 segundos.
Figura 37 Comparao das formulaes espectrais de Bretschneider e JONSWAP
Percebe-se que os espectros de JONSWAP se caracterizam por
apresentarem picos mais pronunciados. Conseqentemente, a declividade mdia
das ondas maior segundo a representao de JONSWAP. De fato, uma das
crticas encontradas na literatura ao modelo proposto por Pierson-Moskowitz se
refere a uma eventual subestimao da declividade caracterstica do mar.
Como prtica de projeto, usual a modelagem de mares locais tendo
como base o espectro de JONSWAP e a considerao do espectro de
Bretschneider para regies abertas, ou mares considerados plenamente
desenvolvidos.
Hidrodinmica I 106
3.6.4. Espalhamento Direcional
Conforme discutimos anteriormente, os mares, especialmente aqueles
prximos zona de gerao, se caracterizam por um certo espalhamento
direcional. A representao dos chamados mares de cristas-curtas (short-crested)
exige que o espectro de energia traga informaes sobre esse espalhamento.
Uma distribuio na forma de cosseno-quadrado usualmente empregada
para introduzir o espalhamento direcional em um espectro. Com esse modelo, a
energia de onda unidirecional, discutida na seo precedente, distribuda em
uma certa faixa angular, na forma:
) ( ) ( cos
2
) , (
2
S S
= ;
2
) (
2
(3.63)
onde representa a direo de onda dominante.
Neste modelo simplificado, a faixa de espalhamento fixa (180
o
) e a
variao de energia ocorre de forma independente na freqncia e na direo.
Assim, em cada direo a forma do espectro a mesma, apenas a sua
intensidade varia. Uma comparao entre o modelo proposto em (3.63) e um
espectro medido em campo apresentado na figura abaixo.
Figura 38 Espectro Direcional de Ondas
Hidrodinmica I 107
Modelos mais elaborados podem ser encontrados na literatura, nos quais a
distribuio de energia e a faixa angular do espalhamento so controladas por um
ou mais parmetros. Uma discusso mais aprofundada sobre estes modelos foge
do escopo deste curso, mas pode ser encontrada, por exemplo, em Massel (1996)
e Ochi (1998).
3.6.5. Aspectos Bsicos da Gerao de Ondas do Mar
Em 1805, o Almirante Sir Francis Beaufort props uma escala para medida
da intensidade do vento no mar. Sua escala relaciona a velocidade de vento, as
ondas do mar e as atitudes a serem tomadas a bordo dos navios, poca, de
propulso a vela. A chamada escala de Beaufort foi posteriormente adaptada
para uso em terra e, ainda hoje, empregada por vrias estaes meteorolgicas.
A figura abaixo apresenta impresses visuais dos estados de mar tipicamente
associados com os diferentes valores da escala de Beaufort. A figura na pgina
seguinte apresenta uma definio dos valores da escala e diferentes descries
dos estados de mar associados.
Como indica a escala de Beaufort, as ondas do mar esto associadas ao
vento, pois so geradas por variaes da presso atmosfrica com o movimento
das massas de ar. Nossa inteno, nesta seo, introduzir alguns conceitos da
teoria de gerao das ondas do mar, para que seja possvel compreender melhor
a relao entre um estado de mar e o vento que o gerou.
Hidrodinmica I 108
Figura 39 Impresso visual de estados de mar associados s intensidades Beaufort
Hidrodinmica I 109
Figura 40 A escala de intensidade de vento de Beaufort
Hidrodinmica I 110
Pela prpria natureza do fenmeno, podemos relacionar como parmetros
importantes na gerao de onda pelo vento: a velocidade do vento (U); a distncia
existente sobre a qual o vento pode atuar na superfcie do mar (normalmente
chamada de pista ou, em ingls, fetch (F)) e a durao da tempestade ou o
tempo total de ao do vento. A figura abaixo relaciona os parmetros acima com
os parmetros estatsticos do mar gerado. No eixo vertical esquerdo l-se a altura
significativa de onda (em escala logartmica) em funo de U, F e da durao. Os
perodos de onda podem ser obtidos pela interpolao das curvas tracejadas.
Figura 41 Relao entre parmetros na gerao de ondas pelo vento.
Percebe-se claramente, nos resultados acima, que os parmetros de onda
tendem assintticamente a situaes de equilbrio para cada velocidade de vento
(U). Estas situaes de equilbrio esto indicadas pela regio triangular direita do
grfico. Uma vez atingido o equilbrio, a altura e o perodo de onda no mais
Hidrodinmica I 111
variaro, mesmo que o vento ainda tenha pista e tempo para agir. O mar que
atinge tal situao conhecido como mar plenamente desenvolvido (fully
developed sea). A seguir, apresentaremos um argumento fsico que explica o
mecanismo pelo qual esse equilbrio atingido e o que ele representa.
De acordo com as equaes (3.23) e (3.53), a energia mdia de ondas de
um determinado estado de mar pode ser expressa por:
2 / 1
0
2
3 / 1
2
1
gm gA E = = (3.64)
A velocidade mdia com que essa energia propagada pode ser expressa
atravs de uma velocidade de grupo representativa do mar, a qual associaremos
freqncia de pico do espectro:
p
g
g
c
2
= (3.65)
De acordo com os resultados apresentados no grfico acima, a energia
mdia e a velocidade de grupo sero funo dos parmetros F, U e da durao.
Na situao de equilbrio, todavia, passam a depender exclusivamente da
velocidade de vento. A razo para isso simples: o aumento da energia de ondas
no pode depender da velocidade absoluta do vento (U), mas sim de sua
velocidade relativa velocidade de propagao do grupo de ondas (U-c
g
). H,
portanto, um limite para o crescimento da altura de ondas expresso pela condio
. Dessa observao decorre que deve existir uma declividade padro, que
podemos definir por
U c
g
g H H
p p p
2 /
3 / 1
2
3 / 1
= , a qual deve ser praticamente
invariante para qualquer mar plenamente desenvolvido.
A tabela abaixo apresenta uma indicao da relao tpica entre velocidade
de vento, altura e perodo de onda, baseada em registros obtidos em rea aberta
(Open Area) e em regio de pista limitada (North Sea Area).
Hidrodinmica I 112
A partir dos resultados acima, possvel inferir, a partir dos resultados
obtidos em guas abertas, o valor de declividade padro. Relembrando que, para
um espectro de Bretschneider
2 1
407 . 1 296 . 1 T T T
p
= = , os resultados indicam uma
certa variao da declividade padro, com valores entre 1.2% (Beaufort 1) e 3,6%
(Beaufort 12). O valor de % 6 , 2
p
pode, ento, ser considerado como tpico para
para um mar plenamente desenvolvido. Devemos notar que esse precisamente
o valor de declividade pressuposto na relao
3 / 1 1
86 . 3 H T = , quando o espectro
da ISSC (de 2 parmetros) recupera o espectro proposto pela ITTC.
A existncia de um valor tpico de declividade para mares plenamente
desenvolvidos ou, em outras palavras, a existncia de uma relao tpica entre
altura e perodo de ondas, justifica as crticas quanto ao espectro proposto pela
ISSC, uma vez que este permite a adoo de valores de altura e perodo de forma
independente.
Observando as relaes (3.62), tambm podemos calcular os valores de
p
com base nas observaes feitas no Mar do Norte. Para uma dada intensidade de
vento, os resultados indicam valores um pouco maiores de declividade, se
comparados com o caso de guas abertas. Os valores variam na faixa
Hidrodinmica I 113
% 1 . 4 % 8 . 1 < <
p
. Os resultados esto de acordo com o fato de o espectro de
JONSWAP se caracterizar por declividades maiores, fato este j mencionado
anteriormente.
As estatsticas de longo-termo das condies de mar de uma determinada
regio so realizadas com base na monitorao de ondas no local durante um
longo perodo de tempo. Atravs da anlise de um grande nmero de registros
possvel gerar uma tabela de ocorrncia de ondas, exemplificada abaixo. Essa
tabela foi obtida para uma certa regio do Mar do Norte e corresponde s
condies registradas durante perodos de inverno. Obviamente, dadas as
especificidades climticas e geogrficas, as condies dependero fortemente do
local e da poca do ano no qual foram realizados os registros. Assim, comum
que essas tabelas sejam apresentadas com uma periodicidade mensal. Para a
confeco da tabela abaixo, por exemplo, foram tomados aproximadamente um
milho de registros de onda.
Atravs das tabelas de ocorrncia de ondas possvel fazer inferncias
estatsticas de longo prazo. Verificou-se, empiricamente, que as probabilidades de
exceder uma determinada altura de ondas pode ser bem reproduzida atravs de
uma distribuio log-normal ou, alternativamente, atravs de uma distribuio de
Hidrodinmica I 114
Weibull. A figura abaixo apresenta uma comparao entre a distribuio
logartmica e os dados experimentais referentes tabela acima.
Figura 42 Distribuio logartmica baseada em dados de ondas do Mar do Norte.
Nesse caso, para se calcular a probabilidade de que a altura significativa de
onda H
1/3
exceda um determinado valor h naquele local e naquela poca do ano,
basta considerar:
h
a
h H P
1
)} ( log{
3 / 1
= >
onde a um parmetro que se refere declividade da curva e deve ser ajustado
aos dados experimentais.
A distribuio de Weibull uma generalizao da distribuio acima,
expressa matematicamente na forma:
= >
b
a
c h
h H P exp ) (
3 / 1
onde b um parmetro de ajuste e c um limite inferior (lower-bound) para a altura
de ondas. Como, no caso de ondas do mar, o parmetro c usualmente prximo
de zero e b prximo de 1, as duas distribuies normalmente se equivalem em
termos de preciso das estimativas.
Hidrodinmica I 115
A figura abaixo apresenta um exemplo de um histograma de altura de
ondas (a) e a comparao de resultados com uma distribuio logartmica (b) e
uma distribuio de Weibull (c).
Figura 43 Histograma de altura de ondas, distribuio log-normal e distribuio de Weibull
Mediante o procedimento de anlise ilustrado acima, possvel levantar um
conjunto de informaes importantes para o projeto de sistemas ocenicos.
Parmetros comumente empregados, por exemplo, so as chamadas condies
de mar decenrias e centenrias, que se referem s piores condies de mar
previstas para ocorrerem em um determinado local em horizontes de tempo de
dez e cem anos, respectivamente.
Hidrodinmica I 116
4. DINMICA DE SISTEMAS OCENICOS EM ONDAS
As far as the laws of mathematics refer to reality, they are not certain;
and as far as they are certain,
they do not refer to reality
Albert Einstein [Geometry and Experience]
4.1. Hipteses Simplificadoras
Neste captulo apresentaremos um modelo para descrio do comportamento
no mar de sistemas ocenicos. Trata-se de um modelo aproximado que, em
virtude destas aproximaes, carrega com si algumas limitaes. Estudaremos a
dinmica de sistemas flutuantes sob a ptica da teoria linear no domnio da
freqncia. Trataremos o sistema flutuante como um oscilador linear com seis
graus de liberdade (os movimentos de surge, sway, heave, roll, pitch e yaw). A
imposta linearidade do modelo de foras de excitao e do modelo dinmico do
corpo possibilita empregar a hiptese de superposio de ondas harmnicas e
tratar o problema de um mar real de forma estatstica, baseada em seu espectro
de energia. Dessa forma, a dinmica correspondente a cada componente
harmnica do mar ser equacionada de forma independente. Atravs desta
abordagem podemos inferir caractersticas dinmicas importantes da resposta
linear do corpo (movimentos do corpo nas freqncias das ondas do mar),
tambm conhecida como resposta de 1 ordem. Uma vez que o problema
linear, a dinmica de 1 ordem pode ser caracterizada atravs de funes de
transferncia denominadas Response Amplitude Operators (RAOs). Uma vez
obtidos os RAOs e com base em um espectro de energia de ondas que
caracteriza um determinado estado de mar, possvel avaliar as estatsticas de
resposta do sistema submetido a este mar, inferindo, por exemplo, as amplitudes
mximas esperadas para os movimentos nos seis graus de liberdade. A teoria
Hidrodinmica I 117
linear, embora aproximada, fornece aproximaes excelentes para a resposta de
1 ordem para a grande maioria dos sistemas ocenicos de interesse e, assim,
prtica fundamental no projeto de sistemas navais e ocenicos. Nesta seo,
procuraremos explorar as caractersticas fsicas do problema que nos permitem
adotar as simplificaes inerentes teoria linear e discutir quais as limitaes
decorrentes desta abordagem.
As duas hipteses simplificadoras fundamentais que sero adotadas na
modelagem so as hipteses de escoamento potencial e de que as condies de
contorno na superfcie-livre e na superfcie do corpo sejam lineares. Vimos, no
captulo precedente, que a adoo destas duas hipteses se justifica no problema
tratamento das ondas do mar, desde que a declividade da onda seja baixa
(kA<<1). Agora, estamos interessados no mais no problema de uma onda livre,
mas sim no caso em que esta onda encontra um corpo flutuante ou submerso e na
dinmica resultante deste encontro. Precisamos, pois, justificar as mesmas
hipteses neste novo contexto. Esse o objetivo almejado com a discusso que
se segue.
No captulo 3 vimos que o escoamento induzido por uma onda que se propaga
na superfcie do mar oscilatrio e, portanto, caracterizado por aceleraes do
fluido. Este escoamento acelerado causar, como conseqncia, foras e
aceleraes de um corpo imerso neste fluido. A questo que se coloca a
seguinte: Podemos considerar o escoamento resultante do movimento deste corpo
como potencial? Obviamente, isto s ser possvel se pudermos garantir, mais
uma vez, que as foras inerciais no escoamento decorrente deste movimento
sejam muito maiores do que as foras viscosas. Um insight importante sobre este
problema dado pelo estudo experimental do escoamento em torno de corpos
acelerados. A figura abaixo, extrada de Newman (1977), apresenta uma
visualizao do escoamento decorrente de uma acelerao impulsiva de um
cilindro imerso. Cada fotografia representa um instante posterior ao incio do
movimento, partindo do repouso at o momento em que o cilindro j adquiriu
velocidade constante. Este conjunto de fotografias foi registrado em um trabalho
Hidrodinmica I 118
de Prandtl em 1927 e seu estudo nos permite observar caractersticas que sero
fundamentais para a nossa anlise.
Percebe-se que, nos instantes iniciais do movimento, h a formao de uma
esteira com dois vrtices simtricos. medida que o cilindro avana, esta esteira
perde a estabilidade e d origem a uma esteira oscilatria, com desprendimento
alternado de vrtices.
Figura 44 Visualizao do escoamento em torno de um cilindro acelerado impulsivamente
(extrada de Newman (1977))
A caracterstica que ns importante aqui a seguinte: At o momento em
que a esteira perde a estabilidade, tudo se passa como um escoamento potencial
em torno de um corpo que se alonga (entendendo o corpo como o cilindro mais os
dois vrtices simtricos jusante). Nos instantes iniciais do movimento, a
contribuio da viscosidade sobre a dinmica global do fluido pequena.
Podemos quantificar essa discusso: As foras inerciais dependem da acelerao
do fluido e podem ser inferidas, ao menos nos instantes iniciais, como
(ver equaes 2.25 e 2.28). Normalizando esta fora obtemos um
coeficiente de fora inercial
U m F
I
&
11
=
2 2
11
2 / 1 l U U m C
FI
&
= onde l a dimenso
caracterstica do corpo (no caso, o dimetro do cilindro). Se o coeficiente de
Hidrodinmica I 119
arrasto viscoso dado por C
D
, podemos inferir a relao entre as foras viscosas
e inerciais da seguinte forma:
l U
U
U m
C l U
C
C
D
FI
D
& &
2
11
2 2
2 / 1
=
(4.1)
uma vez que a massa adicional proporcional ao volume do corpo.
Suponhamos, agora, que o corpo de dimenso caracterstica l est sujeito
ao escoamento oscilatrio imposto pela passagem de um onda harmnica de
amplitude A e freqncia . Sabemos que a amplitude da velocidade do
escoamento oscilatrio dada por A e a amplitude da acelerao por
2
A.
Dessa forma, (4.1) implica que:
l
A
C
C
FI
D
(4.2)
Assim, podemos garantir que a influncia das foras viscosas na dinmica
do fluido ser pequena desde que A<<l.
Em resumo, na hiptese de que a amplitude da onda seja pequena
comparada com as dimenses tpicas do corpo, a hiptese de escoamento
potencial deve fornecer bons resultados. Alm disso, sob esta hiptese a fora
sobre o corpo pode tambm ser considerada linear e, assim: . No
caso de navios, a hiptese acima normalmente satisfeita, a no ser em casos de
ondas de mar com amplitudes extremamente elevadas. No caso de cascos como
os de plataformas semi-submersveis, um outro efeito atua em favor desta
simplificao: Como boa parte do volume de deslocamento se encontra submerso
e como a velocidade e acelerao do fluido decaem rapidamente com a
profundidade, a ao das foras viscosas (quadrticas em U) decai mais
rapidamente do que a ao das foras inerciais (lineares em U ). Vemos, portanto,
que as prprias caractersticas geomtricas dos sistemas garantem a qualidade da
aproximao para a grande maioria dos casos de interesse em engenharia naval e
ocenica. Alguns casos prticos para os quais a hiptese de que A<<l no pode
ser aplicada so o estudo de risers ou tubulaes prximas superfcie e
sistemas flutuantes de dimenses reduzidas, como, por exemplo, monobias.
Uma discusso sobre estes casos ser realizada mais adiante, na seo 4.3.2.2.
+
=
t i
FO F
e C C
&
Hidrodinmica I 120
Logicamente, as aproximaes trazem como conseqncia algumas
limitaes. Em termos prticos, no contexto da engenharia ocenica, uma das
principais se refere impossibilidade de prever movimentos de deriva de sistemas
flutuantes induzidos por ondas. Como veremos no Captulo 5, tais movimentos
decorrem de um fenmeno hidrodinmico no-linear de segunda-ordem, cuja
considerao fundamental para o dimensionamento do sistema de amarrao.
Alm deste, outros fenmenos hidrodinmicos no-lineares freqentemente
causam problemas e do trabalho aos projetistas. Dentre eles, pode-se citar o
problema de run-up de ondas sobre estruturas de grandes dimenses, fenmeno
importante para a previso do air gap mnimo de plataformas e de embarque de
gua no convs (greenwater) e problemas de vibraes estruturais causadas pelo
impacto hidrodinmico com ondas de maior declividade. Cada um destes tpicos
requer a considerao de uma teoria de ondas que inclua efeitos de ordem
superior (quadrticos ou at mesmo cbicos na amplitude de onda). Dada a
importncia destes problemas no que se refere ao projeto de sistemas navais e
ocenicos, o Captulo 5 apresentar uma introduo chamada Teoria No-Linear
de Ondas.
Uma outra conseqncia das simplificaes adotadas no estudo da
resposta de primeira-ordem diz respeito sua preciso quanto previso de
movimentos de ressonantes de sistemas ocenicos. Sabe-se que as amplitudes
de movimentos ressonantes dependem fundamentalmente do amortecimento.
Assim, se efeitos de origem viscosa contriburem com uma parcela significativa
para o amortecimento total do movimento os erros envolvidos sero grandes, j
que os efeitos de viscosidade foram desconsiderados a priori. Um caso tpico o
de movimento de jogo (em ingls, roll) de navios. Os perodos naturais de roll se
situam tipicamente entre 10 e 20 segundos e, conseqentemente, respostas
ressonantes so freqentemente induzidas pelas ondas do mar. Neste caso, dada
a geometria usual dos cascos, os efeitos de dissipao de energia por radiao de
ondas so pequenos e o amortecimento , portanto, dominado por efeitos
viscosos. O emprego da teoria linear para estudo do comportamento no mar de
navios prtica padro e apresenta bons resultados, desde que correes sejam
Hidrodinmica I 121
adotadas no caso de eventuais movimentos ressonantes. Uma discusso quanto
ao mtodo empregado em tais correes ser realizada na seo 4.4.1.
4.2. Definies e Hidrosttica
Consideremos um corpo flutuante em situao de equilbrio hidrosttico, livre
para se mover em seus seis graus-de-liberdade, como ilustrado na figura abaixo:
x
y
z
H
6
ondas
A,
x
y
z
H
6
ondas
A,
Figura 45 Definio dos movimentos do corpo em seis graus-de-liberdade
O sistema de referncias Oxyz suposto fixo no espao e com origem na
superfcie-livre indeformada do mar (representada, ento, por z=0). Na notao
indicial que adotaremos, os movimentos de translao em relao aos eixos x, y e
z (surge, sway e heave) tm amplitudes referenciadas por (
3 2 1
; ; ),
respectivamente. Os movimentos de rotao em torno dos mesmos eixos (roll,
pitch e yaw) tm amplitudes dadas por (
6 5 4
; ; ).
Nesta seo vamos recuperar conceitos bsicos de hidrosttica, j velhos
conhecidos dos alunos de engenharia naval. De fato, a hidrosttica , do conjunto
Hidrodinmica I 122
de disciplinas que hoje formam o escopo bsico da engenharia naval, a mais
antiga. Atravs desse estudo equacionaremos as foras e momentos de
restaurao hidrostticos que regem a flutuabilidade e a estabilidade esttica do
corpo flutuante.
O problema hidrosttico se caracteriza pela ausncia de velocidades e
aceleraes do fluido (e, portanto, do corpo flutuante). Nesse caso, o campo de
presses (j entendo a presso como relativa presso atmosfrica) dado
simplesmente por:
gz p = (4.3)
As resultantes de fora e de momento decorrentes da integrao de (4.3) sobre
a superfcie molhada do corpo (S
B
) resultam ento:
(4.4)
dS n r z g M
dS n z g F
B
B
S
S
) (
r r
r
r
r
=
=
onde r
r
representa o vetor posio (x,y,z).
Suponhamos, agora, um referencial Oxyz solidrio ao corpo, ilustrado na
figura abaixo:
x
y
z
3
x
y
z
x
y
z
3
x
y
z
Figura 46 Referencial fixo e referencial solidrio ao corpo
Para um corpo livre, a fora e o momento em (4.4) sero contrabalanados
pela fora peso do corpo. Como o centro de gravidade do corpo (CG) se desloca
com o corpo, conveniente expressar o momento em termos do referencial
Hidrodinmica I 123
solidrio ao corpo. Se ) , , (
3 2 1
=
T
r
denota o vetor de translao do corpo, ento
podemos escrever e assim, aplicando a frmula de mudana de plo
entre os plos O e O, verifica-se que o momento em relao ao referencial
solidrio ao corpo (
T
r r
r
v r
+ = '
' M
r
) expresso por:
dS n r z g M
T
S
B
] ) [( '
r
r
r
r
=
(4.5)
Obviamente, a rea molhada do corpo depende dos valores de { 6 ,..., 1 ; = j
j
}.
Dessa forma, para avaliar a fora em (4.4) e o momento em (4.5) vamos
considerar o volume V definido como o volume interno do corpo abaixo do plano
z=0. Esse volume limitado pela superfcie molhada do corpo e pela rea de corte
no plano z=0. Aplicando o Teorema de Gauss para a expresso da fora em (4.4),
conclumos que:
k gV dz z g F
V
r r
= =
) ( (4.6)
pois a integral de superfcie sobre o plano z=0 nula.
A fora em (4.6) obviamente a fora de empuxo (buoyancy em ingls)
atuante sobre o corpo. Analogamente, para o momento (4.5), podemos aplicar
uma das variantes do Teorema de Gauss, que estabelece para uma campo
vetorial Q a seguinte relao
r
47
(com a normal exterior ao domnio):
V d Q dS Q n
V S
= ) ( ) (
r r
r
atravs da qual deduzimos que:
= =
V V
T
dV j x i y g dV r z g M ] ) ( ) [( ) ( '
1 2
r r r
r
r
(4.7)
Mostraremos, agora, que o momento (4.7) o produto entre a fora de empuxo
e o vetor posio do centro de empuxo do corpo (ou centro de carena, CB). Para
tanto, notemos que o volume V (instantneo) pode ser obtido como a diferena
entre o volume de deslocamento original ( , abaixo da linha dgua z=0) e o
47
Esta variante decorre diretamente do Teorema da Divergncia, bastando, para isso, tom-lo para
um campo vetorial Q c F
v
r
r
= , onde c
r
um vetor constante no espao e no nulo.
Hidrodinmica I 124
volume da cunha definida entre os planos z=0 e z=0 ( ). Na hiptese de
pequenos deslocamentos, um elemento de volume dessa cunha pode ser escrito
como e, assim, volume da cunha pode ser obtido mediante
integrao sobre a rea do plano de linha dgua (A
0
V
' '
0
dy zdx dV =
W
). Dessa forma:
(4.8) k dy zdx g F
W
A
r r
=
' '
=
W
A
dy dx k r z g dV j x i y g M ' ' ) ' ( ] ) ( ) [( '
1 2
r
r
r r r
(4.9)
Note que as integrais acima, agora, so feitas sobre parmetros conhecidos a
priori para um determinado calado do corpo. Para tornar as expresses ainda mais
convenientes, seria interessante reescrev-las em termos do referencial solidrio
ao corpo. Para isso, observamos que a relao entre os dois sistemas de
coordenadas pode ser aproximada, mais uma vez supondo pequenos
deslocamentos de rotao, na forma:
' ' x x x
R T
r r v
+ + = (4.10)
Considerando (4.10) em (4.8) e (4.9), obtemos:
(4.11) k dy dx x y g F
W
A
r r
+ =
' ' ) ' ' (
5 4 3
+
+ + =
W
A
dy dx j x i y x y g
dV j y z x i z x y g M
' ' ) ' ' )( ' ' (
] ) ' ' ' ( ) ' ' ' [( '
5 4 3
6 5 4 6
v r
r r r
(4.12)
Por fim, sendo:
= = dV x z y x x
B B B B
'
1
) , , (
r v
(4.13)
a posio do centro de carena do corpo (note que as coordenadas j so dadas
em relao ao referencial do corpo) e:
Hidrodinmica I 125
(4.14)
dS y S
dS y x S
dS x S
dS y S
dS x S
W
W
W
W
W
A
A
A
A
A
2
22
12
2
11
2
1
'
' '
'
'
'
=
=
=
=
=
os momentos de rea do plano de flutuao, as equaes (4.11) e (4.12) podem
ser reescritas na forma:
( k S S A g F
W
)
r r
1 5 2 4 3
+ = (4.15)
j S S S y z x g
i S S S z x y g M
B B B
B B B
r
r r
] ) ( [
] ) ( [ '
11 5 12 4 1 3 6 5
12 5 22 4 2 3 4 6
+ +
+ + =
(4.16)
Como esperado, a fora hidrosttica confere a restaurao em heave enquanto
o momento hidrosttico responsvel pelas restauraes em roll e pitch. Os
movimentos do corpo no plano horizontal no possuem restaurao hidrosttica e,
portanto, s podem ser restritos atravs de foras externas (por exemplo, atravs
de amarraes).
Para um corpo submerso, A
W
e os momentos (4.14) so nulos e as
restauraes hidrostticas dependem apenas do volume de deslocamento e da
posio do centro de carena.
O ponto de coordenadas ( 0 ; ;
2 1 W W
A S A S ) conhecido, na terminologia naval,
como centro de flutuao (em ingls, center of flotation, CF) e representa o centro
de giro do corpo flutuante em roll e pitch. No restante desta seo,
consideraremos o CF como a origem do sistema de coordenadas solidrio ao
Hidrodinmica I 126
corpo (nesse caso, ) e que o corpo possui um plano de simetria
vertical
0
2 1
= = S S
48
(caso de um navio, por exemplo), ento 0
12
= S .
As foras e momento hidrostticos so contrabalanados pela fora peso do
corpo ( ) e seu momento em relao origem do sistema de coordenadas
do corpo. Se as coordenadas do centro de gravidade do corpo (CG), escritas no
sistema local, so dadas por ( ) podemos somar as contribuies do peso
s foras e momentos hidrostticos e escrever as foras e momentos totais como:
mg ; 0 ; 0
G G G
z y x ; ;
( ) [ k A g m F
W t
]
r r
3
= (4.17)
j mgy y g gS mgz z g mgx x g
i gS mgz z g mgx x g mgy y g M
G B G B G B
G B G B G B t
r
r r
)] ( ) ( ) [(
)] ( ) ( ) [( '
6 11 5
22 4 6
+ +
+ + =
(4.18)
Adotando a notao indicial para foras ( ) e momentos ( )
podemos reescrever (4.17) e (4.18) na forma matricial:
3 2 1
; ; F F F
6 5 4
; ; F F F
( )
j i ; 0 e j i ; 1
] [ ) ( ) (
, ,
5 , 4 , 3 , i
= = =
+ + =
j i j i
i i G B i G B i
C mgx x g mgy y g mg g F
(4.19)
A matriz uma matriz (6x6) conhecida como matriz de restaurao
hidrosttica , cujos termos no nulos so dados por:
] [C
) (
) (
) (
) (
56
11 55
46
22 44
33
G B
G B
G B
G B
W
mgy y g c
gS mgz z g c
mgx x g c
gS mgz z g c
gA c
=
+ =
=
+ =
=
(4.20)
48
Mesmo que o corpo no o possua, pode-se sempre adotar uma rotao dos eixos horizontais de
forma a anular o momento cruzado de rea.
Hidrodinmica I 127
Para que o corpo esteja em equilbrio ( 0 =
i
), a expresso (4.19) impe as
seguintes condies:
= m
e:
G B
G B
y y
x x
=
=
A primeira condio recupera o Princpio de Arquimedes. A segunda impe
que as foras peso e empuxo tenham pontos de aplicao na mesma vertical,
anulando os momentos. Nesta situao de equilbrio, os termos em (4.20)
resultam:
0
) (
0
) (
56
11 55
46
22 44
33
=
+ =
=
+ =
=
c
S z z mg c
c
S z z mg c
gA c
G B
G B
W
(4.21)
O termo de restaurao em roll ( ) em (4.20) conhecido na nomenclatura
naval com altura metacntrica transversal (GM
44
c
t
), enquanto o termo de restaurao
em pitch a chamada altura metacntrica longitudinal (GM
l
). normalmente deste
ponto que a maioria dos livros bsicos de Arquitetura Naval parte para o estudo de
estabilidade esttica de embarcaes. Toda a deduo acima, no entanto, ser
muito importante para o equacionamento da dinmica de um corpo flutuante em
ondas, dado que a matriz [C] usualmente a nica fonte de restaurao dos
movimentos de heave, roll e pitch.
4.3. Foras Hidrodinmicas
Nossa inteno, agora, descrever as foras hidrodinmicas que atuaro
sobre o corpo flutuante quando da incidncia de uma onda plana progressiva de
Hidrodinmica I 128
pequena amplitude (A) e freqncia . Consideraremos, portanto, ondas lineares
e os movimentos induzidos pelas mesmas e assim, para facilitar o
desenvolvimento algbrico, adotaremos novamente a notao complexa.
As amplitudes de movimento { 6 ,..., 1 ; = j
j
} sero nmeros complexos,
trazendo com si no apenas as informaes de amplitude de deslocamento do
corpo mas tambm as informaes das fases relativas entre cada movimento e a
onda incidente. Dessa forma, as seis componentes de velocidade do corpo podem
ser expressas na forma:
(4.22) 6 ,..., 1 ) Re( ) ( = = j e i t U
t i
j j
Como as ondas incidentes sobre o corpo so supostas de pequena amplitude,
os deslocamentos do corpo tambm o sero e, assim, podemos adotar
procedimento anlogo quele empregado no Captulo 2 (ver eq. 2.23) e decompor
o potencial de velocidades procurado na forma:
(4.23)
+ =
=
t i
j
A j j
e z y x A z y x t z y x
6
1
) , , ( ) , , ( Re ) , , , (
Em (4.23) cada potencial { 6 ,..., 1 ; z) y, (x, = j
j
} representa o potencial de
velocidades devido a um movimento de amplitude unitria no correspondente grau
de liberdade, na ausncia de ondas incidentes. O potencial resultante da soma
dessas seis componentes conhecido ento como potencial de radiao. O nome
se refere ao fato de que o corpo, ao se movimentar, irradia ondas que se
propagam, afastando-se do mesmo.
O potencial z) y, (x,
A
, por sua vez, representa o potencial devido presena
da onda incidente com amplitude unitria e sua interao com o corpo fixo e
conhecido como potencial de difrao. Pode ser decomposto tambm em duas
componentes distintas, a primeira referente ao potencial de onda incidente no
perturbada, ou seja, na ausncia do corpo ( z) y, (x,
0
) e a segunda representado o
espalhamento desta onda uma vez que a mesma incide sobre o corpo fixo
( z) y, (x,
7
):
z) y, (x, z) y, (x, z) y, (x,
7 0
+ =
A
(4.24)
Hidrodinmica I 129
Deve-se observar que toda essa decomposio de efeitos indicada em (4.23)
e (4.24) somente possvel graas hiptese de pequenas amplitudes de onda e
pequenos deslocamentos do corpo. Nessa situao, podemos desconsiderar
variaes geomtricas da regio molhada do corpo e, uma vez que a teoria
linear, podemos admitir a superposio dos diferentes campos ondulatrios.
Cabe-nos, agora, equacionar o problema de contorno em funo das oito
componentes distintas identificadas acima. Considerando (4.23), sabemos que
cada componente dever satisfazer a equao da continuidade:
7 ,..., 1 , 0 0 = = j
j
(4.25)
A imposio da condio de Cauchy-Poisson na superfcie-livre (z=0), por sua
vez, implica em:
7 ,..., 1 , 0 0, z em 0
2
= = =
+ j
z g
j
j
(4.26)
e a condio de impermeabilidade no fundo:
7 ,..., 1 , 0 , - z em 0 = = =
j h
z
j
(4.27)
ou, alternativamente, em profundidade infinita { 7 ,..., 0 ; 0 = j
j
} quando
{ - z }.
Finalmente, para os potenciais de radiao, a condio de contorno no corpo
exige que:
6 , 5 , 4 , em ) (
3 , 2 , 1 , em
B 3
B
= =
= =
j S n r i
n
j S n i
n
j
j
j
j
r r
(4.28)
J para o potencial de difrao, a correta imposio da condio de contorno
implica em:
em 0
B
S
n
A
=
e, portanto:
Hidrodinmica I 130
em
n
B
0 7
S
n
(4.29)
A soluo do problema de contorno consiste em determinar as sete incgnitas
representadas pelos seis potenciais de radiao e pelo potencial de
espalhamento, j que o potencial de onda incidente conhecido. Essa soluo
pode ser entendida como a superposio de dois problemas de natureza fsica
distinta. O primeiro corresponde quele expresso pelas equaes (4.25-4.28) e
conhecido como problema de radiao. O segundo, referente soluo das
equaes (4.25-4.27 e 4.29), chamado problema de difrao. Como veremos, da
soluo do primeiro resultam as foras inerciais (massas adicionais) e o chamado
amortecimento de radiao (radiation damping), enquanto do segundo resultam
as chamadas foras de excitao (wave-exciting forces) que so aquelas
efetivamente responsveis por induzir os movimentos do corpo.
Antes, contudo, precisamos discutir a necessidade de uma condio de
contorno adicional chamada condio de radiao. Tal necessidade fica bvia se
observarmos, por exemplo, que um termo na forma z) y, (x, .
A
C , com C
representando uma constante arbitrria, pode ser somado aos potenciais de
radiao 6 ,..., 1 ; z) y, (x, = j
j
sem violar as condies de contorno (4.26-4.28). Em
outras palavras, a unicidade das solues no est ainda garantida. Esse
problema, contudo, pode ser eliminado atravs da imposio de uma condio
que garanta que as ondas irradiadas e espalhadas tenham o sentido de
propagao correto, afastando-se do corpo. Assim, definindo pode-
se escrever:
2 / 1 2 2
) ( y x R + =
7 2 1 , R p/
1
,..., , j e
R
ikR
j
=
(4.30)
onde o decaimento com a distncia imposto para garantir a conservao de
energia medida que a onda se afasta do corpo. Em um caso bidimensional, a
condio correspondente seria dada por:
(4.31) p/ x
ikx
j
e
m
Hidrodinmica I 131
As foras hidrodinmicas atuantes sobre o corpo podem ser calculadas
mediante a integrao do campo de presso linear sobre a superfcie S
B
, campo
este obtido atravs da equao de Bernoulli, desprezando-se o termo quadrtico
na velocidade do fluido:
gz
t
p
= t) z, y, (x,
ou:
(4.32)
+ =
=
t i
j
A j j
e i z y x A z y x t z y x p
6
1
) , , ( ) , , ( Re ) , , , (
Assim, as foras e momentos sobre o corpo resultam:
=
B
B
B
S
t i
j
S
j
t i
j
S
dS n Ae i
dS n e i
dS n z g t F
r
r
r
r
) ( Re
Re
) (
7 0
6
1
(4.33)
=
B
B
B
S
t i
j
S
j
t i
j
S
dS n r Ae i
dS n r e i
dS n r z g t M
) )( ( Re
) ( Re
) ( ) (
7 0
6
1
r r
r r
r r
r
(4.34)
Cada uma das trs componentes nas equaes (4.33) e (4.34) representam
diferentes contribuies para a fora e o momento resultante. Comparando essas
duas equaes com (4.4), percebe-se que o primeiro termo de fora e momento
Hidrodinmica I 132
corresponde, na verdade, s contribuies hidrostticas
49
. Estas foram discutidas
na seo anterior e, como j sabemos, sero as responsveis pela restaurao
hidrosttica do corpo em heave, roll e pitch. As integrais no segundo termo de
(4.33) e (4.34) so facilmente identificadas com os termos de fora e momento
derivados em (2.25) e (2.27) no estudo das foras hidrodinmicas sobre um corpo
com movimento arbitrrio em fluido infinito. Naquela ocasio, definimos tais
integrais como as massas adicionais. Aqui, porm, os potenciais
{ 6 ,..., 1 ; z) y, (x, = j
j
} so complexos. A massa adicional corresponder parte real
destas integrais, enquanto a parte imaginria resultar no chamado
amortecimento de radiao. Por fim, a terceira componente em (4.33) e (4.34)
representa a fora e o momento induzidos pela ao da onda incidente sobre o
corpo.
As foras e momentos hidrostticos j foram discutidos na seo 4.2. A seguir,
discutiremos separadamente as demais foras e momentos hidrodinmicos.
4.3.1. Massa Adicional e Amortecimento de Radiao
Discutiremos nesta seo as caractersticas das componentes de fora e
momento representadas pelo segundo termo das equaes (4.33) e (4.34). Para
facilitar a exposio, trabalharemos novamente com uma notao indicial
denotando as trs componentes dessa fora e momento na forma ) , , (
3 2 1
F F F F =
r
e
, lembrando que ) , , ( ) , , (
6 5 4 3 2 1
F F F M M M M = =
v
} , { M F
v r
agora se referem
exclusivamente fora e momento representados pelo segundo termo em (4.33) e
49
Cabe aqui um comentrio quanto influncia da onda sobre a rea molhada do corpo. Na
hiptese de pequena amplitude de onda e pequenos deslocamentos do corpo, possvel mostrar
que a contribuio de fora decorrente da variao da superfcie molhada do corpo induzida pelo
movimento da superfcie-livre uma contribuio de segunda-ordem na amplitude da onda e pode,
assim, ser desprezada. Para maiores detalhes ver Newman (1977).
Hidrodinmica I 133
(4.34). Atravs dessa notao podemos representar as seis componentes de
forma matricial:
(4.35) 6 ,..., 2 , 1 Re
6
1
=
=
=
i f e F
j
ij
t i
j i
onde, considerando (4.28) em (4.33) e (4.34):
=
B
S
j
i
ij
dS
n
f
(4.36)
fcil perceber que os 36 coeficientes so anlogos s massas adicionais
definidas em (2.28). Aqui, porm, estes coeficientes so complexos e suas partes
real e imaginria dependem da freqncia
ij
f
em funo da condio de contorno
(4.26). Definindo-se:
(4.37)
ij ij ij
b i a f =
2
as componentes de fora (4.35) resultam:
( ) 6 ,..., 2 , 1 Re
6
1
2
=
=
=
i b i a e F
j
ij ij
t i
j i
e, lembrando que as velocidades e aceleraes do corpo so dadas por:
6 ,..., 1 ) Re( ) (
6 ,..., 1 ) Re( ) (
2
= =
= =
j e t U
j e i t U
t i
j j
t i
j j
&
podemos reescrever as foras na forma:
6 ,..., 2 , 1
6
1
= = + =
=
i U b U a F
j ij
j
j ij i
&
(4.38)
Verifica-se, assim, que as foras e momentos resultantes sobre o corpo
apresentam componentes em fase com a acelerao do corpo (inerciais) e
componentes em fase com as velocidades do corpo (amortecimentos),
respectivamente proporcionais a:
= =
= =
B
B
S
j
i
ij
S
j
i
ij ij
dS
n
f bij
dS
n
f a
) Im(
1
) (
) Re(
1
) (
2 2
(4.39)
Hidrodinmica I 134
Os coeficientes so os coeficientes de massa adicional enquanto os
coeficientes recebem o nome de coeficientes de amortecimento de radiao.
ij
a
ij
b
As massas adicionais diferem daquelas correspondentes ao corpo imerso em
fluido sem fronteiras, devido presena da superfcie livre. O amortecimento por
radiao se deve ao fato de que o corpo, ao oscilar, irradia ondas que se
propagam para longe do corpo representando um fluxo de energia. Consideremos
agora um nico modo de oscilao do corpo. Observando (4.38) percebemos que
o trabalho mdio realizado para contrabalanar as foras impostas pelo fluido ao
longo de um ciclo de onda dado por:
2
2 2
2
1
i ii i ii i i
b U b U F = = (4.40)
Lembrando que a energia mdia transportada pela onda proporcional ao
quadrado de sua amplitude, (4.40) mostra que h uma relao direta entre os
coeficientes de amortecimento e a amplitude de onda irradiada pelo corpo.
ij
b
Uma propriedade importante dos coeficientes e a simetria. A
demonstrao desse fato anloga ao que fizemos para demonstrar a simetria
das massas adicionais na seo 2.2.5, mediante o emprego do Teorema de
Green. Aqui, todavia, o teorema deve ser aplicado considerando-se no apenas a
superfcie do corpo (S
ij
a
ij
b
ij
m
B
), mas tambm a superfcie-livre (S
F
), o fundo (S
bot
) e a
fronteira distante do corpo (S
):
+ + +
=
S S S S
i
j
j
i
bot F B
dS
n n
0
(4.41)
fcil verificar, no entanto, que a considerao das condies de contorno
correspondentes em cada uma das fronteiras, com exceo da superfcie do
corpo, implica na anulao do integrando e, assim:
B
S
i
j
j
i
dS
n n
0
(4.42)
o que implica diretamente em:
Hidrodinmica I 135
ji ij
f f =
Alm disso, pode-se demonstrar que, nos limites de baixas e altas freqncias
( 0 e ), existem relaes diretas entre os coeficientes de massa
adicional do corpo no problema com superfcie-livre ( ) e aqueles obtidos em
fluido sem fronteiras ( ). Uma discusso sobre o comportamento da massa
adicional e do amortecimento nesses limites assintticos pode ser encontrada, por
exemplo, em Newman (1977).
ij
a
ij
m
4.3.2. Foras de Excitao em Ondas
Resta-nos, por fim, analisar o terceiro termo nas expresses de fora e
momento (4.33) e (4.34). Estes, como dissemos, se referem s foras e momentos
causados pela incidncia de ondas sobre o corpo fixo. Empregando novamente
uma notao indicial, podemos escrever as trs componentes de fora e de
momento de excitao na forma:
{ } 6 ,..., 2 , 1 Re
,
= = i X Ae F
i
t i
i exc
(4.43)
e, empregando-se as condies de contorno (4.28) em (4.33) e (4.34), obtm-se:
+ =
B
S
i
i
dS
n
X
) (
7 0
(4.44)
Os termos representam, portanto, as amplitudes complexas de fora de
excitao nos respectivos graus de liberdade, para uma amplitude de onda
unitria. Graas linearidade do problema, uma vez obtidos os valores de ,
sero conhecidos os valores das foras para qualquer valor de amplitude de onda,
bastando-se multiplic-los de acordo com (4.43).
i
X
i
X
O potencial de onda incidente
0
conhecido. O potencial
7
deve ser
determinado como soluo do problema de difrao, discutido anteriormente.
Hidrodinmica I 136
Cabe aqui uma pequena digresso. As parcelas de fora de excitao que
dependem exclusivamente da ao da onda incidente (
=
B
S
i
i
dS
n
X
0
) so
conhecidas como foras de Froude-Krylov. A chamada hiptese de Froude-Krylov
consiste, ento, em aproximar as foras de excitao desconsiderando-se a
perturbao causada pelo corpo no escoamento. Trata-se, de fato, da
aproximao mais simples para estas foras e sua aplicao, embora muito
limitada, pode ser justificada em alguns casos. Um exemplo o caso das foras
de excitao sobre um navio esbelto (alto L/B), quando o comprimento de onda
muito maior do que a boca da embarcao. Neste caso pode-se mostrar que as
componentes de Froude-Krylov so os termos dominantes nas foras de surge,
heave e pitch e bons resultados podem ser obtidos com o emprego da tcnica
conhecida como teoria de faixas (strip-theory)
50
. Todavia, na grande maioria dos
problemas envolvendo corpos flutuantes de grandes dimenses, a influncia do
potencial de espalhamento decisiva e os dois termos da equao (4.44) devem
ser considerados para o computo das foras de excitao.
No contexto da teoria linear, os coeficientes de fora de excitao (4.44) sero
calculados sobre a superfcie-molhada mdia do corpo, isto , sem considerar a
influncia da elevao da superfcie sobre tal rea. Conseqentemente, as foras
de excitao sero idnticas quer o corpo esteja fixo ou livre para se mover em
ondas. A distino entre os dois problemas decorre de efeitos de segunda-ordem.
Uma vez que o potencial de espalhamento
7
e os potenciais de radiao
6 ,..., 1 ; z) y, (x, = i
i
satisfazem as mesmas condies de contorno na superfcie-
livre e no fundo e a mesma condio de radiao, podemos novamente empregar
o Teorema de Green para obter:
B
S
i
i
dS
n n
0
7
7
(4.45)
50
Maiores detalhes podem ser encontrados em Newman (1977).
Hidrodinmica I 137
e, substituindo (4.45) em (4.44), escrever:
=
B
S
i
i
i
dS
n n
X
7
0
Porm, observando a condio de contorno (4.29), podemos escrever as
foras de excitao de uma forma alternativa, independente do potencial de
difrao:
=
B
S
i
i
i
dS
n n
X
0
0
(4.46)
As relaes (4.46) so conhecidas na literatura como Relaes de Haskind.
Elas expressam as foras de excitao nos vrios graus de liberdade em funo
de seus respectivos potenciais de radiao. interessante notar ainda que,
novamente de acordo com o teorema de Green:
+ + +
=
S S S S
i
i
bot F B
dS
n n
0
0
0
(4.47)
e, aqui, as integrais em S
F
e S
bot
mais uma vez se anulam devido s condies de
contorno, mas a integral em S
no, pois o potencial de onda incidente no
satisfaz a condio de radiao. Dessa forma, podemos reescrever (4.46) como:
=
S
i
i
i
dS
n n
X
0
0
(4.48)
e verificamos, portanto, que as foras de excitao no corpo tambm podem ser
obtidas com base nos potenciais de radiao calculados no chamado campo
distante (far-field, em ingls).
Mais ainda, pode-se mostrar
51
que no campo distante os potenciais de
radiao so proporcionais raiz quadrada do fluxo de energia, que por sua vez,
como discutimos anteriormente, se relaciona com os coeficientes de
amortecimento de radiao. Empregando-se o mtodo da fase estacionria, pode-
se encontrar a relao entre as foras de excitao e os coeficientes de
amortecimento de radiao:
51
Para uma discusso mais elaborada ver, por exemplo, Newman (1977).
Hidrodinmica I 138
d X
gc
k
b
i
g
ii
=
2
0
2
) (
8
(4.49)
onde o ngulo denota a direo de incidncia de onda.
A expresso (4.49) permite inferir o comportamento das foras de excitao
no limite de altas freqncias ( ). Sabendo que o amortecimento de radiao
tende a zero neste limite (ver Newman (1977), pgs 303-304), pode-se deduzir que
as foras de excitao devem tender a zero mais rapidamente do que o termo
. Considerando-se a relao de disperso de ondas verifica-se, ento,
que no limite de altas freqncias as foras de excitao em um problema
tridimensional decaem mais rapidamente do que . Para problemas
bidimensionais, de forma similar, esse decaimento deve ser mais rpido do que
. O significado fsico deste decaimento fcil de compreender: O limite de
altas freqncias
( )
2 / 1
/ k c
g
2 / 3
2 / 1
corresponde tambm ao limite em que o comprimento de
onda tende a zero 0 e, nesta situao, a superfcie do corpo estar sujeita
ao simultnea de vrios ciclos de ondas que acabam por se cancelar. Alm
disso, o decaimento exponencial da perturbao ondulatria sobre o fluido
aumenta com a freqncia de onda, o que implica que, neste limite, a presso
dinmica s ser significativa em uma faixa muito estreita abaixo da superfcie
mdia do fluido. Denotemos por um comprimento tpico do corpo. Os dois
efeitos acima, combinados, explicam porque as foras de excitao devem tender
a zero medida que
B
l
ou, alternativamente, medida que o comprimento de
onda se torna muito pequeno face s dimenses tpicas do corpo 1 / <<
B
l .
Situao muito diferente ocorre na situao oposta, no limite de baixas
freqncias 0 ou quando o comprimento de ondas muito grande
comparado s dimenses tpicas do corpo ( 1 / >>
B
l ). Este o chamado regime
de ondas longas e ser discutido em maiores detalhes a seguir.
Hidrodinmica I 139
4.3.2.1 Aproximao no Regime de Ondas Longas
Interessa-nos agora estudar uma aproximao para as foras de excitao no
regime de ondas longas ( 0 ).
A condio de contorno no corpo implica que:
n n
r r
. .
0 7
= em S
B
(4.50)
mas esta pode ser reescrita a partir dos potenciais de radiao, bastando para
isso considerar as condies (4.28):
=
n z n y n x
i
n
3 0 2 0 1 0
7
.
r
em S
B
(4.51)
e, portanto:
n
z y x
i
n
r r
. .
3
0
2
0
1
0
7
em S
B
(4.52)
No regime de ondas longas, a aproximao consiste em considerar o campo
de velocidades induzido pela onda incidente como um campo constante sobre o
corpo cte
B
S
0
. Nessa condio, podemos reescrever (4.52) como:
n
z y x
i
n
r r
. .
3
0
2
0
1
0
7
em S
B
(4.53)
da qual deduzimos que o potencial de espalhamento
7
pode, no regime de ondas
longas, ser aproximado por:
3
0
2
0
1
0
7
z y x
i
(4.54)
Substituindo (4.54) em (4.44) tem-se, ento:
3
1
0
0
j j
ij
S
i
i
x
f
i
dS
n
X
B
(4.55)
O primeiro termo em (4.55) ser responsvel pela fora e pelo momento
induzidos pelo potencial de onda incidente:
Hidrodinmica I 140
(4.56)
B
B
S
t i
exc
S
t i
exc
dS n r Ae i t M
dS n Ae i t F
) ( Re ) (
Re ) (
0 0 ,
0 0 ,
r r
r
r
r
No entanto, aplicando-se o teorema de Gauss na forma do gradiente,
podemos calcular a fora com base no volume de deslocamento do corpo ( ) e
na rea do plano de flutuao, pois:
=
w B
A S
dS n dV dS n
r r
0 0 0
(4.57)
Todavia, como no regime de ondas longas a variao espacial do potencial
0
lenta (j que ), podemos aproxim-lo atravs da seguinte expanso em
srie de Taylor:
0 k
+
= =
y
y
x
x
x
x x 0
0
0
0
0 0
) 0 ( ) (
r
r
r
r
r
r
(4.58)
e, assim:
= =
w w B
A x A x
w
S
dS n y
y
dS n x
x
A dS n
r r
r
r
r
r
r
r
0
0
0
0
0 0 0
) 0 (
Mas, lembrando das definies dos momentos de rea do plano de flutuao
dadas em (4.14), podemos ainda escrever:
k S
y
S
x
A dS n
x x
w
S
B
r r
r
r
r
r
r
+ +
= =
2
0
0
1
0
0
0 0 0
) 0 (
(4.59)
Analogamente, aplicando o teorema de Gauss na forma do divergente tem-se
para a integral no clculo do momento:
=
w B
A S
dS n r dV r dS n r ) ( ) ( ) (
0 0 0
r r r r r
ou:
+
w B
A
B
S
dS j x i y x dS n r ) ( ) (
0 0 0
r r
r r r
(4.60)
e, considerando (4.58):
Hidrodinmica I 141
j S
y
S
x
S
i S
y
S
x
S x dS n r
x x
x x
B
S
B
r r
r r
r r r
r
r
r
r
r
r
r
r
+ +
= =
= =
12
0
0
11
0
0
1 0
22
0
0
12
0
0
2 0 0 0
) 0 (
) 0 ( ) (
(4.61)
Cabe, ento, observar que as derivadas do potencial
0
sero termos
proporcionais a ( 1
0
<< k ). Dessa forma, os termos proporcionais a essas
derivadas em (4.59) e (4.61) so pequenos se comparados aos termos
proporcionais a
0
, assim como pequena a contribuio advinda do potencial de
espalhamento (ver (4.55)). Assim, os termos dominantes de fora e o momento de
excitao neste limite podem ser expressos simplesmente por:
{ }
{ ) )( 0 ( Re ) (
) 0 ( Re ) (
1 2 0
0
j S i S Ae i t M
A Ae i t F
t i
exc
w
t i
exc
v r r r
}
r r
(4.62)
Finalmente, observando que:
) ( )} 0 ( Re{
0
t g Ae i
t i
=
r
chega-se s seguintes expresses para esses termos:
) )( ( ) (
) ( ) (
1 2
j S i S t g t M
k t gA t F
exc
w exc
v r r
r r
(4.63)
Percebe-se, portanto, que no limite de baixas freqncias ( 0 ), as foras e
momentos de excitao dominantes correspondem s foras e momentos
hidrostticos associados elevao de onda incidente sobre o corpo.
A contribuio do potencial de espalhamento em (4.55) pode ser relacionada
com os coeficientes de massa adicional e amortecimento (parte real e parte
imaginria de ).
ij
f
Podemos inferir a influncia desta contribuio atravs da anlise de um caso
simples. Suponhamos, ento, um corpo flutuante simtrico em relao aos planos
x=0 e y=0. Vamos calcular a fora vertical sobre este corpo induzida por ondas de
baixa freqncia. Neste caso, dada a simetria do corpo, sabemos que
, assim como os momentos de rea 0
32 31
= = f f 0
2 1
= = S S . De (4.55) e (4.59),
temos ento:
Hidrodinmica I 142
z
f
i
A i i X
w
+ +
0
33 0 0 3
) 0 (
r
e, de (4.26) e (4.37) e considerando ) 0 (
0 0
r
k :
) 0 ( ) ( ) 0 ( ) 0 (
0 33 33
2
0 0 3
r r r
k b i a
i
A i k i X
w
+ +
ou:
[ ] ) 0 ( ) 0 ( ) 0 (
0 0 33 33 0 3
r r r
w
A i k b a k i X + + +
e, assim:
[ ] { } ) 0 ( ) 0 ( ) 0 ( Re ) (
0 0 33 33 0 3
r r r
w
A i k b a k i t F + +
Por fim, notando que { } ) , 0 ( ) 0 ( Re
0
t w Ae k i
t i
r
&
r
=
e { } ) , 0 ( ) 0 ( Re
0
t w Ae k
t i
r r
=
podemos escrever:
[ ] ) ( ) ( ) ( ) (
0 0 33 0 33 3
t gA t w b t w a t F
w
+ + + & (4.64)
A expresso (4.64) demonstra, portanto, que alm da fora hidrosttica
associada onda, a qual representa aqui o termo dominante, h ainda um termo
inercial, proporcional acelerao vertical do fluido calculada na origem, e um
termo de amortecimento, proporcional velocidade vertical do fluido neste mesmo
ponto.
Se o corpo estiver submerso a uma profundidade tal que efeitos de superfcie-
livre possam ser ignorados, ento 0 ; 0 ;
33 33 33
=
w
A b m a . Nesse caso, a
expresso (4.64) se resume em:
[ ] ) ( ) (
0 33 3
t w m t F & + (4.65)
4.3.2.2 A Frmula de Morison
fcil perceber a semelhana de (4.65) com o termo inercial da chamada
frmula de Morison, j conhecida dos estudantes de engenharia naval. Esta
equao foi proposta de maneira ad hoc na dcada de 50 por J.E. Morison, ento
aluno de graduao, para o clculo das foras sobre uma coluna vertical de seo
circular exposta a ondas. Para isso, sobreps dois efeitos: a fora inercial de
Hidrodinmica I 143
ondas e a fora de origem viscosa e, assim, derivou uma equao para a fora em
cada seo da coluna. A abordagem empregada por Morison se mostra
apropriada para o estudo da fora sobre corpos no regime de ondas longas, com
aplicaes, por exemplo, no estudo de foras sobre risers, umbilicais, dutos
submersos, estruturas treliadas de plataformas do tipo jaqueta e at mesmo
como aproximao para foras sobre plataformas semi-submersveis. Tomemos
como exemplo o problema de um cilindro circular horizontal longo, submerso a
uma profundidade h, sob a ao de uma onda regular com amplitude A e
freqncia :
h
D
A
h
D
A
Figura 47 Ao de ondas sobre um cilindro circular submerso
Neste caso, empregando-se a abordagem proposta por Morison, a fora
seccional de heave dada por:
[ ] ) ( ) (
2
1
) ( 1 ) (
0 0 0 3
t w t Dw C t w C S t f
D M
+ + = & (4.66)
onde S corresponde rea da seo, C
M
o coeficiente de inrcia da seo em
heave e C
D
o coeficiente de arrasto do cilindro. A fora ento composta por um
termo inercial e um termo no-linear (quadrtico) de arrasto, o segundo defasado
de 90
o
do primeiro.
Keulegan & Carpenter (1958) determinaram experimentalmente os valores de
C
M
e C
D
para vrios tipos de cilindros sob escoamento oscilatrio e verificaram
que os resultados apresentavam boa aderncia com o adimensional que hoje leva
o nome de nmero de Keulegan Carpenter (KC):
D
VT
KC = (4.67)
Hidrodinmica I 144
onde V representa a amplitude de velocidade do escoamento e T o perodo de
oscilao do mesmo.
No caso do escoamento induzido por ondas harmnicas, temos e,
assim, o valor de KC para o cilindro da figura 47 dado por:
kz
Ae V =
kh
e
D
A
KC
=
2 (4.68)
No regime de KC baixo (tipicamente KC<3), as foras inerciais so
dominantes e o termo de arrasto pode ser desprezado. Conforme discutimos na
seo 4.1, neste caso a amplitude de movimento do fluido muito pequena para a
formao da camada-limite e para a separao da mesma, no havendo a
formao de uma esteira rotacional significativa. Nesse limite, vale a aproximao
de escoamento potencial e o coeficiente de inrcia corresponder ao coeficiente
de massa adicional terico da seo. Assim:
[ ] ) ( 1 ) (
0 3
t w C S t f
M
& + (4.69)
e a fora total sobre o cilindro recuperar, ento, aquela prevista pela equao
(4.65).
Para valores mais altos de KC, o termo de arrasto passa a desempenhar
papel importante. Nessa situao, portanto, os efeitos viscosos sero importantes
e os coeficientes de inrcia (C
M
) e de arrasto (C
D
) sero influenciados pelo nmero
de Reynolds (Re) e pela rugosidade da superfcie. Um estudo bastante completo
sobre os valores destes coeficientes para diferentes valores de KC pode ser
encontrado, por exemplo, em Sarpkaya & Isaacson (1981).
4.4. Resposta em Ondas Regulares
Nas sees anteriores, discutimos as foras hidrostticas e hidrodinmicas
atuantes sobre um corpo flutuante ou submerso em ondas. Nosso objetivo, agora,
levantar as equaes do movimento do corpo e discutir alguns aspectos
importantes da dinmica de sistemas ocenicos usuais.
Hidrodinmica I 145
As equaes do movimento decorrem diretamente da segunda lei de Newton
ao se igualar as foras e momentos inerciais do corpo s foras e momentos
decorrentes do campo de presso do fluido (4.33) e (4.34). Assim, observando
(4.19)
52
, (4.35) e (4.43), podemos escrever as seis equaes de movimento
acopladas na forma complexa:
i=1,2,...,6 (4.70)
+ + =
= =
6
1
6
1
) (
j
i ij ij j
t i
j
j ij
AX f c e U M
&
onde os termos M
ij
representam os coeficientes da matriz de inrcia do corpo,
dada por:
[M] =
m 0 0 0 mz
G
-my
G
0 m 0 -mz
G
0 mx
G
0 0 m my
G
-mx
G
0
0 -mz
G
my
G
I
11
I
12
I
13
mz
G
0 -mx
G
I
21
I
22
I
23
-my
G
mx
G
0 I
31
I
32
I
33
Lembrando que:
j=1,2,...,6 (4.71)
) Re( ) (
) Re( ) (
2 t i
j j
t i
j j
e t U
e i t U
=
=
&
temos ento:
i=1,2,...,6 [
=
= +
6
1
2
j
i ij ij ij j
AX c f M ]
]
Finalmente, de (4.37) temos que e, assim, podemos
reescrever as equaes do movimento na forma final:
ij ij ij
b i a f =
2
(4.72) [
=
= + + +
6
1
2
) (
j
i ij ij ij ij j
AX c b i a M
52
Por simplicidade, os termos decorrentes do peso prprio do corpo em (4.19) j foram
incorporados nos coeficientes c
ij
.
Hidrodinmica I 146
As seis equaes em (4.72) podem ainda ser escritas na forma matricial, ao
se definir a matriz de massas adicionais [A], a matriz de amortecimento de
radiao [B] e a matriz de restaurao hidrosttica [C]:
{ }{ } { } X A C B i A M = + + + ] [ ] [ ]) [ ] ([
2
(4.73)
Deve-se notar que em (4.73) os coeficientes das quatro matrizes so reais,
enquanto o vetor de foras de excitao {X} complexo, assim como tambm
complexo o vetor das amplitudes de movimento {}.
O vetor complexo A Z } { } { = representa os movimentos do corpo (amplitude
e fase) quando excitado por uma onda de amplitude unitria. Este vetor
corresponde, portanto, a uma funo de transferncia que relaciona a amplitude
de onda com a resposta linear do sistema dinmico. mais conhecido na
literatura como o vetor dos Response Amplitude Operators (RAOs). Obviamente,
os RAOs dependero no apenas da freqncia de onda mas tambm da
direo de incidncia da onda em relao ao corpo (). Assim, observando (4.73),
verificamos que o vetor de RAOs pode ser calculado como:
(4.74) { { } X C B i A M Z
1
2
] [ ] [ ]) [ ] ([ )} , ( {
+ + + = }
O vetor complexo e, portanto, cada elemento dado por: } ,..., , { } {
6 2 1
Z Z Z Z =
j=1,2,...,6
I j R j j
iZ Z Z
, ,
+ =
O mdulo de Z
j
(
2
,
2
, I j R j j
Z Z Z + = ) fornece a amplitude de movimento no
grau de liberdade j para uma onda de amplitude unitria de freqncia que
incide sobre o corpo com um ngulo . A fase de Z
j
( ) / arctan(
, , R j I j j
Z Z = )
representa a diferena de fase entre o movimento do corpo no grau de liberdade j
e a onda incidente.
Hidrodinmica I 147
A figura abaixo ilustra os RAOs de heave e pitch de um navio petroleiro (sem
velocidade de avano) para duas diferentes direes de incidncia:
=180
(incidncia de ondas pela proa) e =90
(incidncia de travs). Neste caso,
os coeficientes potenciais (massas adicionais, amortecimentos, restauraes e
foras de excitao) foram calculados atravs de um software baseado na tcnica
de teoria de faixas.
Figura 48 RAOs de heave e pitch de um navio petroleiro
Podemos discutir alguns aspectos qualitativos da resposta. Tomemos como
exemplo, ento, o movimento de heave. Dada a simetria do navio em relao ao
plano y=0, a maioria dos acoplamentos dinmicos com o movimento vertical
resulta nula, exceto um possvel acoplamento heave-pitch. Este acoplamento de
fato existe no exemplo acima e se apresenta claramente nos resultados. Todavia,
por simplicidade, vamos supor que a influncia do movimento de pitch no RAO de
heave pequena, como de fato o na realidade, dados os valores usualmente
Hidrodinmica I 148
elevados da restaurao hidrosttica de pitch. Assim, ignorando esse possvel
acoplamento, o RAO de heave ser dado por:
} ) ( {
) , (
33 33 33
2
3
3
c b i a m
X
Z
+ + +
=
(4.75)
onde: = m o deslocamento em massa do corpo e
W
gA c =
33
representa a
restaurao hidrosttica em heave (ver 4.20). Assim:
} ) ( {
) , (
33 33
2
3
3
W
gA b i a
X
Z
+ + +
= (4.76)
No limite de baixas freqncias ( 0 ), a fora de excitao em heave pode
ser aproximada por (4.64), o que significa, portanto, que:
1 ) , (
3
Z para 0 (4.77)
como mostram os resultados da figura (4.38). Alm disso, a fase resulta nula neste
limite ( 0 qdo 0
3
) . Ou seja, quando a onda muito longa em comparao
com as dimenses tpicas do navio, o navio simplesmente acompanha a elevao
da superfcie-livre.
Por outro lado, no limite de altas freqncias ( ), vimos que a fora de
excitao deve tender a zero e, portanto:
0 ) , (
3
Z para (4.78)
Percebe-se em (4.76) que o movimento de heave apresenta uma freqncia
natural dada por:
33
3
a
gA
W
n
+
=
(4.79)
e, portanto, o navio experimentar uma ressonncia em heave quando a
freqncia de onda coincidir com a freqncia natural (
3 n
= ). Atravs dos
resultados da figura 48 percebemos que 5 . 0
3
n
rad/s para o navio em questo.
Ou seja, o perodo natural do movimento vertical aproximadamente 12,5
segundos.
No caso de corpos flutuantes, ressonncias ocorrero tambm para os
movimentos de pitch e roll, em funo da restaurao hidrosttica nestes modos.
Hidrodinmica I 149
No caso de navios, como a restaurao em pitch usualmente grande, as
freqncias naturais so elevadas e normalmente no h problemas de
ressonncia com as ondas do mar. O mesmo no ocorre, todavia, para o
movimento de roll. Outros tipos de sistemas como as plataformas semi-
submersveis, por exemplo, so projetados com o objetivo especfico de
apresentarem freqncias naturais em heave, roll e pitch suficientemente baixas
para estarem dessintonizadas da faixa de freqncias de energia significativa das
ondas do mar. O objetivo destes sistemas justamente reduzir os movimentos
ressonantes nestes modos e, com isso, minimizar os movimentos verticais.
Se no houver nenhum tipo de restrio externa aos movimentos do plano
vertical (surge, sway e yaw), esses movimentos no apresentaro ressonncias
pois a restaurao hidrosttica nesses modos nula. Sistemas ocenicos
ancorados passaro a ter perodos freqncias naturais de oscilao no plano
horizontal, cujos valores sero diretamente proporcionais rigidez das linhas de
ancoragem. Em geral, estas freqncias so baixas, com perodos tpicos da
ordem de 100 segundos. Dessa forma, ressonncias no sero excitadas em
primeira-ordem, mas apenas atravs de foras hidrodinmicas de baixa freqncia
de segunda-ordem, dando origem ao fenmeno conhecido como deriva-lenta
(slow-drifts).
Como no caso de um oscilador mecnico, a amplitude de resposta
ressonante ser inversamente proporcional ao coeficiente de amortecimento do
movimento. Na modelagem baseada em escoamento potencial, esse
amortecimento depende exclusivamente dos coeficientes b
ij
, ou seja, do
amortecimento por irradiao de ondas. Nos casos dos movimentos de heave,
pitch e roll, em alguns casos esse amortecimento pode ser baixo, de forma que a
influncia dos amortecimentos de origem viscosa passa a ser importante para a
estimativa da amplitude de movimento ressonante. Esse aspecto ser discutido
em maiores detalhes a seguir.
Hidrodinmica I 150
4.4.1. Incorporao de Amortecimento Viscoso
Em alguns casos, o corpo flutuante ao oscilar praticamente no gera ondas
e, dessa forma, o amortecimento por radiao de ondas pequeno. Um caso
tpico no qual isso ocorre o movimento de roll de um navio. Alm disso, cascos
projetados para apresentar pequenos valores de fora de excitao em heave,
pitch e roll necessariamente apresentaro baixos valores de amortecimento de
radiao nestes movimentos, fato que pode ser deduzido diretamente a partir das
relaes de Haskind (ver eq. 4.49). Nessa categoria se enquadram, por exemplo,
os cascos de plataformas semi-submersveis, TLPs, Spars e Mono-Colunas.
Em todos os casos discutidos acima, o amortecimento viscoso pode ser da
mesma ordem ou at mesmo dominante no amortecimento total do sistema e deve
ser includo no clculo dos RAOs sob pena de superestimar, e muito, as
amplitudes de resposta ressonantes. Sabemos, contudo, que o amortecimento de
origem viscosa tipicamente quadrtico na velocidade do movimento (U
j
). Assim,
o amortecimento total pode geralmente ser modelado na forma:
j j j j j j
U U d U d B
) 2 ( ) 1 (
+ = (4.80)
Os valores dos coeficientes linear e quadrtico so normalmente
obtidos a partir de ensaios de decaimento realizados em tanque de provas com
modelos do casco em escala reduzida.
) ; (
) 2 ( ) 1 (
j j
d d
A figura a seguir ilustra os resultados de ensaios de decaimento em heave e
roll de um modelo de navio FPSO (escala 1:90).
Hidrodinmica I 151
10 15 20 25 30 35 40 45 50 55 60
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Sinal de decaimento - Anotar Perodo e Intervalo
t(s)
(a)
180 200 220 240 260 280 300 320 340 360
-8
-6
-4
-2
0
2
4
6
8
Sinal de decaimento - Anotar Perodo e Intervalo
t(s)
(b)
Figura 49 Resultados de ensaios de decaimento em heave (a) e roll (b) com modelo de
navio FPSO
Uma discusso sobre aspectos operacionais envolvidos neste tipo de
ensaio e sobre as tcnicas existentes para a obteno dos coeficientes de
amortecimento a partir de seus resultados pode ser encontrada, por exemplo, em
Chackrabarti (1994).
Deve-se observar, todavia, que para o clculo dos RAOs supe-se que a
dinmica do sistema seja linear. Assim, deve-se obter um valor de amortecimento
linear equivalente , definido com base na hiptese de que a energia
dissipada por esse amortecimento no decorrer de um ciclo do movimento seja
igual quela dissipada pelo amortecimento original. Ou seja:
) (
) (eq
j
d
dt U U U d U d
T
dt U U d
T
j j j j
T
j j j
T
j
eq
j
). (
1
.
1
) 2 (
0
) 1 (
0
) (
+ =
(4.81)
Observando (4.71) e aps alguma lgebra, conclui-se ento que o
amortecimento pode ser escrito como:
j
eq
j j
U d B
) (
=
com:
) 2 ( ) 1 ( ) (
3
8
j j j
eq
j
d d d
+ = (4.82)
O segundo termo em (4.82) deve ento ser somado ao termo de
amortecimento de radiao (b
jj
) para o computo dos RAOs. Este o procedimento
Hidrodinmica I 152
usualmente empregado pelos softwares que trabalham com o problema de
comportamento no mar, por exemplo o programa WAMIT. Esta abordagem
apresenta, contudo, um problema de ordem prtica. Percebe-se em (4.82) que o
amortecimento equivalente depender no apenas da freqncia da onda, mas
tambm da amplitude do movimento, desconhecida a priori. Isto normalmente
obriga o ajuste dos coeficientes de amortecimento com base em valores
experimentais de RAO obtidos atravs de ensaios em ondas regulares.
Por esta razo, tambm, em simulaes dinmicas do sistema no domnio
do tempo prefervel no empregar diretamente os RAOs para clculo dos
movimentos, mas sim utilizar os coeficientes potenciais calculados numericamente
para resolver a equao dinmica no-linear, incluindo os termos de
amortecimento quadrtico. Uma discusso sobre o enfoque no domnio do tempo
ser apresentada na seo 4.5.1.
4.5. Resposta em Ondas Irregulares
Uma vez conhecidas as funes de transferncia dos movimentos para
amplitude de onda unitria (RAOs), espectros de energia dos movimentos
(tambm chamados espectros de resposta) podem ser facilmente calculados para
qualquer espectro de mar ) (
S .
O procedimento para tanto simples. Lembremos, inicialmente, da definio
do espectro de energia do mar (ver eq. 3.48):
2
2
1
). (
n n
A d S =
Analogamente, o espectro de resposta do sistema no grau de liberdade j pode
ser definido por:
2
) (
2
1
). (
j j
d S = (4.83)
e, portanto:
Hidrodinmica I 153
2
2
) (
2
1
) (
) (
). (
A
A
d S
j
j
=
ou seja:
) ( ) ( ) (
2
S Z S
j j
= (4.84)
onde ) (
j
Z representa o RAO do grau de liberdade j.
O procedimento descrito por (4.84) para obteno dos espectros de resposta
conhecido como cruzamento espectral. Uma interpretao grfica deste
procedimento apresentada na figura abaixo.
Figura 50 Interpretao grfica do cruzamento espectral.
Uma vez determinados os espectros ) (
j
S as mesmas inferncias
estatsticas, discutidas na seo 3.6.2 com respeito s ondas do mar, podem ser
obtidas para os movimentos do corpo. Obtm-se, ento, as estatsticas de
resposta do corpo para um determinado estado de mar. Tomemos mais uma vez
como exemplo o movimento de heave para exemplificar o processo. O espectro de
Hidrodinmica I 154
resposta em heave ) (
3
S . O momento espectral de k-sima ordem do
movimento de heave ento dado por:
(4.85)
=
0
3 , 3
). ( d S m
k
k
A amplitude significativa do movimento de heave ser:
0 , 3
3 / 1
3
2 m A =
e o perodo mdio de movimento pode ser estimado como o perodo central do
espectro de resposta:
1 , 3
0 , 3 3
1
2
m
m
T =
O perodo entre zeros do movimento, por sua vez, dado por:
2 , 3
0 , 3 3
2
2
m
m
T =
Como a dinmica do sistema foi suposta linear, a funo distribuio da
resposta ser Gaussiana, na medida que a distribuio de onda tambm o . A
distribuio de amplitudes de resposta seguir a distribuio de Rayleigh e,
portanto, a probabilidade de que a amplitude de heave exceda um determinado
valor a pode ser calculada como:
0 , 3
2
2 3
} {
m
a
e a A P
= >
Pode-se ainda estimar o nmero mdio de vezes que isso ocorrer ao longo
de uma hora:
} {
3600
3
3
2
a A P
T
N
hora
> =
Procedimentos anlogos podem ser realizados para os outros graus-de-
liberdade, complementando-se assim as estatsticas de resposta dos movimentos
de primeira-ordem.
Hidrodinmica I 155
4.5.1. A Abordagem no Domnio do Tempo
Simuladores numricos do comportamento dinmico de sistemas ocenicos
so ferramentas de projeto cada vez mais importantes no contexto da engenharia
naval e ocenica. Estes cdigos permitem avaliar, no domnio do tempo, as
respostas de sistemas flutuantes sob ao de ondas, vento e correnteza martima.
Consideram a influncia de risers e linhas de amarrao e, hoje em dia, dadas as
lminas dgua de operao cada vez maiores, representam um complemento
importantssimo aos estudos em tanques de provas, j que estes ltimos passam
a sofrer srios problemas de escala.
Uma abordagem no domnio do tempo permite ainda lidar com efeitos de
natureza no-linear como, por exemplo, o problema de amortecimento viscoso
discutido na seo precedente. A grande maioria dos simuladores de sistemas
ocenicos emprega os resultados de programas que calculam os coeficientes
potenciais no domnio da freqncia. O procedimento operacional requer, ento,
uma realizao do espectro de mar e uma transformao dos resultados para que
possam ser empregados no domnio do tempo.
No decorrer desta seo apresentaremos, de forma breve, os fundamentos
desta transformao. Nosso objetivo aqui no o de equacionar de forma
completa o problema, mas sim indicar os princpios nos quais este
equacionamento se baseia. Para tanto trabalharemos, por simplicidade, com o
movimento em um nico grau-de-liberdade.
As Funes de Resposta Impulsivas
Suponhamos, ento, um corpo flutuante livre para se mover em um grau-de-
liberdade, com movimento descrito por x(t), e que no instante de tempo t=t
0
o
corpo esteja em repouso. Durante um pequeno intervalo de tempo , o corpo
realiza um deslocamento impulsivo
t
x com velocidade constante V , de tal forma
que: . t V x =
Hidrodinmica I 156
O potencial de velocidades do escoamento induzido por este movimento
impulsivo ) , , , ( t z y x pode ser escrito como:
x t z y x t z y x = ) , , , ( ) , , , ( ; (4.86)
onde ) , , , ( t z y x o potencial de velocidades normalizado pelo deslocamento.
Obviamente, o fluido ainda realizar movimentos aps o intervalo , quando
o corpo volta ao repouso. O princpio bsico da tcnica que vamos descrever ,
ento, o seguinte: Um movimento arbitrrio do corpo pode ser descrito como uma
sucesso de deslocamentos impulsivos. O escoamento fluido durante um intervalo
de tempo qualquer, contudo, ser influenciado pelo movimento que o fluido
tinha nos instantes anteriores e, da mesma forma, influenciar o escoamento nos
instantes posteriores. O fluido apresenta ento uma certa memria daquilo que
ocorreu com o escoamento em instantes passados.
t
t
O potencial do escoamento durante um intervalo (
m m m
t t t + , ) ser ento
escrito como:
(4.87) t V t t t V t
k k m
m
k
k m m
+ + =
=
) , ( ) (
1
com:
m: nmero de time-steps;
t
m
: t m t +
0
V
m
: velocidade durante o intervalo ( t t t
m m
+ , );
V
k
: velocidade durante o intervalo ( t t t
k m k m
+
, );
: potencial de velocidades normalizado pela velocidade no intervalo
( ); t t t
m m
+ ,
: potencial de velocidades normalizado pelo deslocamento no intervalo
( ); t t t
k m k m
+
,
No limite em que , (4.87) pode ser reescrita como: 0 t
(4.88)
+ =
t
d t x t t x t ) ( ). ( ) ( ) ( & &
Hidrodinmica I 157
O campo de presses do escoamento, por sua vez, pode ser estimado
diretamente da equao de Bernoulli. Supondo que o problema seja linear, a
presso dinmica ser ento dada por:
t
t p
=
) (
e a fora sobre o corpo obtida mediante integrao sobre a superfcie molhada
S
B
:
=
B
S
dS n p F
r
Somando tambm a essa fora um termo de restaurao hidrosttica e uma
fora de excitao externa W(t), Cummins (1962) demonstrou que a equao do
movimento pode ser escrita na forma:
(4.89)
= + + +
0
) ( ) ( ) ( ). ( ) ( ) ( t W t Cx d t x B t x A M & & &
com coeficientes (A;B) a serem determinados a partir dos potenciais e . Hoje
(4.89) conhecida como equao de Cummins.
Ogilvie (1964), por outro lado, relacionou os coeficientes (A;B) com os
coeficientes de massa adicional ) ( a e de amortecimento por radiao ) ( b
demonstrando que:
) ( = = a A (4.90)
e
=
0
) cos( ) (
2
) (
d t b B (4.91)
A equao (4.91) conhecida como funo de retardo ou funo de
memria. Atravs de (4.90) e (4.91) pode-se equacionar o problema no domnio
do tempo empregando-se a equao de movimento (4.89) e os coeficientes
potenciais calculados no domnio da freqncia. Resta ainda, todavia, a
necessidade de realizar as foras externas (por exemplo, a fora de excitao de
ondas) no domnio do tempo. Para tanto, parte-se do princpio de superposio de
ondas harmnicas, permitido no contexto da teoria linear de ondas. Supondo que
Hidrodinmica I 158
o corpo esteja sob ao de um mar com espectro de energia dado por ) (
S e
lembrando que:
=
+ =
N
n
n n n
t A t
1
) cos( ) (
podemos escrever:
=
+ + =
N
n
Xn n n n n
t A X t W
1
) cos( ) ( ) ( (4.92)
onde X(
n
) so as foras de excitao de ondas para amplitude de onda unitria
discutidas na seo (4.3), que apresentam fase
Xn
.
Com as foras calculadas em (4.92) e com os coeficientes dados por (4.90) e
(4.91), pode-se finalmente integrar numericamente a equao do movimento
(4.89) tendo como dados de entrada os coeficientes potenciais calculados atravs
de um programa linear no domnio da freqncia (por exemplo, o programa
WAMIT).
4.6. Determinao dos Coeficientes Potenciais
Ao longo deste captulo apresentamos a modelagem terica que permite
calcular as foras hidrodinmicas e, em ltima instncia, a chamada resposta de
primeira-ordem de sistemas ocenicos flutuantes. Esse clculo, todavia, depende
da soluo dos problemas de contorno de radiao (eqs. 4.25 4.28) e de
difrao (eqs. 4.25 4.27 e 4.29). Atravs desta soluo sero conhecidos os
potenciais de radiao e espalhamento { 7 ,..., 1 ; z) y, (x, = j
j
} e, de posse dos
mesmos, ser possvel ento calcular as massas adicionais, amortecimentos de
radiao e foras de excitao.
Atualmente, para as geometrias usuais de cascos, essa soluo obtida
atravs de procedimentos numricos baseados em tcnicas que consideram
escoamentos potenciais bidimensionais (2D) ou tridimensionais (3D). Uma
discusso mais profunda sobre as tcnicas e mtodos numricos empregados
para a determinao dos potenciais de velocidade foge do escopo deste curso. No
Hidrodinmica I 159
entanto, algumas menes sero feitas a seguir, com o objetivo de orientar
aqueles que desejarem iniciar um estudo sobre essas tcnicas.
Originalmente, uma das primeiras tcnicas desenvolvidas para o estudo de
comportamento no mar de navios foi baseada na chamada Teoria de Faixas (Strip
Theory). Estas se caracterizam por transformar o problema tridimensional em uma
srie de problemas bidimensionais independentes. O processo consiste em
estudar cada seo do navio como uma seo independente, resolvendo ento
problemas de contorno bidimensionais. Obviamente, esta aproximao ser tanto
melhor quanto menores forem os efeitos tridimensionais do escoamento sobre o
corpo. Em geral, admite-se que uma preciso aceitvel pode ser obtida para
corpos esbeltos, com relao comprimeto/boca elevada (tipicamente L/B >3). Os
resultados finais so ento obtidos mediante uma simples integrao ao longo do
comprimento do corpo.
O passo inicial para o desenvolvimento dessa metodologia foram os trabalhos
de Ursell (ver, por exemplo, Ursell (1949)), que obteve uma soluo analtica para
o escoamento em torno de um cilindro circular infinitamente longo semi-imerso em
um fluido. Todavia, as sees usuais de casco de navios no so exatamente
circulares. Tasai (1959) empregou ento tcnicas de mapeamento conforme para
obter os potenciais de velocidade em sway, heave e roll de sees geomtricas
tpicas de cascos de navios. O mtodo consiste em mapear sees quaisquer em
sees circulares no plano complexo, onde valem as solues derivadas por
Ursell, para, posteriormente, projetar estas solues de volta para o plano real.
Uma das limitaes do mtodo de Ursell-Tasai a impossibilidade de mapear
sees completamente submersas, como, por exemplo, o bulbo de proa de
navios. Esta limitao foi posteriormente superada por Frank (1967). A teoria
proposta por Frank obtm as solues procuradas com base no potencial da
chamada fonte pulsante bidimensional.
Mais recentemente, com o progressivo aumento de capacidade dos
processadores numricos, os mtodos para a soluo do problema de
escoamento tridimensional se tornaram viveis. Atualmente, o procedimento mais
difundido para o estudo do problema de comportamento no mar baseado em
Hidrodinmica I 160
uma tcnica numrica denominada mtodo de elementos de contorno (boundary
elements method, BEM). Esse mtodo consiste, como o prprio nome diz, na
soluo do problema considerando apenas o contorno do domnio fluido (ao
contrrio do mtodo de elementos finitos, por exemplo) e vantajoso em termos
de esforo numrico para problemas de contorno lineares baseados na equao
de Laplace. Os alunos de engenharia naval da EPUSP tm um primeiro contato
com a aplicao deste mtodo para a soluo de problemas de escoamento
potencial na disciplina Mtodos Computacionais para Engenharia I (PNV2441).
Em geral, a modelagem terica para a soluo do problema 3D se baseia na
aplicao do Teorema de Green para obter uma equao diferencial cuja varivel
o prprio potencial de velocidades procurado. A soluo em muito simplificada
com o conhecimento das chamadas Funes de Green do problema de contorno
especfico. Essas funes de Green so o equivalente da fonte pulsante 2D
empregada originalmente por Frank. No caso do estudo de comportamento no mar
de sistemas flutuantes sem velocidade de avano, por exemplo, a funo de
Green permite que a equao diferencial seja automaticamente satisfeita em boa
parte do contorno (no caso, na superfcie-livre e no fundo, alm de garantir a
satisfao da condio de radiao de ondas). Com isso, a soluo da equao
diferencial deve ser realizada exclusivamente sobre a superfcie molhada do
corpo. As tcnicas empregadas para essa soluo podem se basear em uma
discretizao da superfcie do corpo na forma de painis (o chamado mtodo dos
painis) ou atravs da representao analtica desta superfcie por funes B-
spline.
A metodologia acima descrita empregada por diversos programas
desenvolvidos para a soluo do problema de comportamento no mar, entre eles o
programa WAMIT, desenvolvido originalmente no Massachusetts Institute of
Technology (MIT).
Maiores detalhes sobre as tcnicas para soluo do problema de escoamento
tridimensional podem ser encontrados, por exemplo, em Bertram (2000).
Hidrodinmica I 161
5. UMA INTRODUO AOS EFEITOS HIDRODINMICOS
DE SEGUNDA-ORDEM
To appear...
Hidrodinmica I 162
REFERNCIAS BIBILOGRFICAS
[1] BATCHELOR, G.K. An Introduction to Fluid Dynamics. Cambridge Univ.
Press, 1967.
[2] BERTRAM, V. Practical Ship Hydrodynamics. Butterworth-Heinemann,
London/UK, 2000.
[3] CHAKRABARTI, S. Offshore Structure Modeling. Advanced Series on
Ocean Engin., Vol.9, World Scientific Publishing Co., Singapore, 1994.
[4] CRAIK, A.D.D. The origins of water wave theory. Annu. Rev. Fluid Mech.
36, pp.1-28, 2004.
[5] CRAIK, A.D.D. George Gabriel Stokes on water wave theory. Annu. Rev.
Fluid Mech. 37, pp.23-42, 2005.
[6] CUMMINS, W.E. The Impulse Response Function and Ship Motions,
International Symposium on Ship Theory, N
o
8, Hamburg, Germany, 1962.
[7] FALTINSEN, O.M. Sea Loads on Ships and Offshore structures.
Cambridge University Press, 1990.
[8] FRANK, W. Oscillation of Cylinders in or below the Free Surface of Deep
Fluids, Tech. Report 2375, Naval Ship Research and Development Centre,
Washington D.C., USA, 1967.
[9] HESS, J.L. Panel Methods in Computational Fluid Dynamics. Annual Rev.
Fluid Mech. 22, pp.255-274, 1990.
[10] HIRSCH, C. Numerical Computation of Internal and External
Flows. Vols. 1 e 2, John Wiley & Sons, 1988.
Hidrodinmica I 163
[11] KEULEGAN, G.H. & CARPENTER, L.H. Forces on Cylinders and
Plates in an Oscillating Fluid, Journal of Research of the National Bureau
of Standards, 60 (Research Paper 2857), 1958.
[12] MASSEL, S.R. Ocean Surface Waves: Their Physics and
Prediction. Advanced Series on Ocean Eng. (11), World Scientific, 1996.
[13] MEI, C.C. The Applied Dynamics of Ocean Surface Waves. John
Wiley & Sons, New York, Revised Printing, 1989.
[14] MILES, J.W. On the Generation of Surface Waves by Turbulent
Shear Flows, J. Fluid Mechanics, 7, pp.469-478, 1960.
[15] NEWMAN, J.N. Marine Hydrodynamics. The M.I.T. Press,
Cambridge MA/USA, 1977.
[16] OCHI, M.K. Ocean Waves. The Stochastic Approach. Cambridge
Ocean Tech. Series (6), Cambridge University Press, 1998.
[17] OGILVIE, T. Recent Progress Towards the Understanding and
Prediction of Ship Motions Proc. 5
th
Symposium on Naval Hydrodynamics,
1964.
[18] OHKUSU, M. (editor) Advances in Marine Hydrodynamics.
Advances in Fluid Mech. Series (5), Computational Mech. Publications,
Southampton, UK, 1996.
[19] PHILLIPS, O.M. The Dynamics of the Upper Ocean. Cambridge
University Press, 1966.
[20] PIERSON, W.J. & MOSKOWITZ, L. A Proposed Spectral Form for
Fully Developed Wind Seas Based on the Similarity Theory of
S.A.Kitaigorodsku, Tech. Report U.S. Naval Oceanographic Office Contract
No 62306 1042, 1963.
Hidrodinmica I 164
[21] PRICE, W.G. & BISHOP, R.E.D. Probabilistic Theory of Ship
Dynamics. Chapman and Hall Ltd, London, 1974.
[22] SARPKAYA, T. & ISAACSON, M. Mechanics of Wave Forces on
Offshore Structures. Van Nostrand Reinhold Company, New York, 1981.
[23] SOBOLEV, S.L. Partial Differential Equations of Mathematical
Physics, Dover Publications, New York, 1989.
[24] TASAI, F. On the Damping Force and Added Mass of Ships
Heaving and Pitching, Technical Report, Research Institute for Applied
Mech., Kyushu University, Japan, Vol.VII, No 26, 1959.
[25] TOKATY, G.A. A History and Philosophy of Fluid Mechanics,
Dover edition, 1994.
[26] URSELL, F. On the Heaving Motion of a Circular Cylinder on the
Surface of a Fluid, Quarterly Journal of Mechanics and Applied
Mathematics, II, 1949.
[27] WEHAUSEN, J.V. & LAITONE, E.V. Surface Waves. Encyclopedia
of Physics, Vol.9, Springer-Verlag, 1960.
[28] WILLS, A.P. Vector Analysis with an Introduction to Tensor
Analysis. Dover Publications, New York, 1958.
You might also like
- Análise Modal Operacional: a metodologia de análise de vibrações estruturais aplicada em um píerFrom EverandAnálise Modal Operacional: a metodologia de análise de vibrações estruturais aplicada em um píerNo ratings yet
- O Surgimento de Navios Autônomos: um processo transformador para a indústria do transporte marítimoFrom EverandO Surgimento de Navios Autônomos: um processo transformador para a indústria do transporte marítimoNo ratings yet
- Simos A N 2014 Apostila Hidrodinâmica Comportamento No Mar de Sistemas OceânicosDocument170 pagesSimos A N 2014 Apostila Hidrodinâmica Comportamento No Mar de Sistemas OceânicosJairo R GonzzallezNo ratings yet
- Teoria linear de ondas e resistência ao avanço de naviosDocument130 pagesTeoria linear de ondas e resistência ao avanço de naviosRafael GribelNo ratings yet
- Especialização em Engenharia Naval UPE - USP - Módulo 2 - HidrostáticaDocument154 pagesEspecialização em Engenharia Naval UPE - USP - Módulo 2 - HidrostáticaMateus DutraNo ratings yet
- Hidrodinâmica do Navio II: Projeto e Análise de Desempenho de EmbarcaçãoDocument34 pagesHidrodinâmica do Navio II: Projeto e Análise de Desempenho de EmbarcaçãoRafael LucenaNo ratings yet
- Hidrodinâmica das ondas do mar e impactos em estruturas costeirasDocument33 pagesHidrodinâmica das ondas do mar e impactos em estruturas costeirasRomario Lima0% (1)
- Analise Estrutural de NaviosDocument146 pagesAnalise Estrutural de NaviosLucas Demetrius Lima de FreitasNo ratings yet
- TF - Estruturas 2Document31 pagesTF - Estruturas 2Everson Vieira0% (1)
- Obras aquaviárias em exercícios - DNIT/2013Document127 pagesObras aquaviárias em exercícios - DNIT/2013Carlos EduardoNo ratings yet
- Apresentação Ordem Engenheiros Rev BDocument58 pagesApresentação Ordem Engenheiros Rev Bdjodje1No ratings yet
- Sphaier - Hidrodinâmica IIDocument218 pagesSphaier - Hidrodinâmica IIMauricio Gomes de BarrosNo ratings yet
- Projetos de Navio - FinalDocument36 pagesProjetos de Navio - FinalMaria Eduarda ChameNo ratings yet
- Reconhecimento de Linha D'Água com Filtros de GaborDocument8 pagesReconhecimento de Linha D'Água com Filtros de GaborSamuel SarNo ratings yet
- Terminal Portuário Graneleiro de Barcarena - Atividade Diagnostica 2Document101 pagesTerminal Portuário Graneleiro de Barcarena - Atividade Diagnostica 2Vitoria KallynkyaNo ratings yet
- Aula 4 - Parte 3 Estabilidade em AvariasDocument60 pagesAula 4 - Parte 3 Estabilidade em AvariasJoão Rafael100% (3)
- Cálculo da resistência ao avanço em embarcaçõesDocument15 pagesCálculo da resistência ao avanço em embarcaçõesClaudio Rodrigues Olinto100% (2)
- Processos EstaleirosDocument92 pagesProcessos EstaleirosPaulo Figueiredo OliveiraNo ratings yet
- Aula Viga Navio e Arranjos Estruturais 2Document69 pagesAula Viga Navio e Arranjos Estruturais 2Denilson MoraisNo ratings yet
- Hidrodinamica e Propulsao PDFDocument195 pagesHidrodinamica e Propulsao PDFAndre OliveiraNo ratings yet
- Otimização de comboios de barcaçasRelaçãoCanalCanalprofundidade/calado desabrigado abrigadoDocument10 pagesOtimização de comboios de barcaçasRelaçãoCanalCanalprofundidade/calado desabrigado abrigadoguilhermelealNo ratings yet
- Projeto de canais de navegação para portosDocument16 pagesProjeto de canais de navegação para portosLana AbrantezNo ratings yet
- Prova de Hidrodinâmica do Navio com Questões sobre Manobras e CavitaçãoDocument6 pagesProva de Hidrodinâmica do Navio com Questões sobre Manobras e CavitaçãoMatheus FazziNo ratings yet
- Arquitetura Naval - MFC & MFMDocument65 pagesArquitetura Naval - MFC & MFMthiagoNo ratings yet
- Curso Online de Engenharia Naval: Introdução à Hidrodinâmica e Resistência ao AvançoDocument66 pagesCurso Online de Engenharia Naval: Introdução à Hidrodinâmica e Resistência ao AvançoSidney RogérioNo ratings yet
- Portos e Vias Navegáveis - Notas de Aula - Antônio NélsonDocument104 pagesPortos e Vias Navegáveis - Notas de Aula - Antônio NélsonRoberta Souza100% (1)
- Modulo 7-Tecnologia de Construcao Naval (Machado)Document120 pagesModulo 7-Tecnologia de Construcao Naval (Machado)Mateus DutraNo ratings yet
- Tipos de embarcações de cargaDocument17 pagesTipos de embarcações de cargaBRENNONo ratings yet
- Transporte por empurradores: estudo de caso do Norsul CaravelasDocument46 pagesTransporte por empurradores: estudo de caso do Norsul Caravelasdjodje1No ratings yet
- Curvas de Bonjean - Lista 04Document5 pagesCurvas de Bonjean - Lista 04Rayana Lima CintraNo ratings yet
- 10 - Logística Aplicada À Construção de NaviosDocument71 pages10 - Logística Aplicada À Construção de NaviosLillian PriceNo ratings yet
- Resistência de embarcações e submarinosDocument38 pagesResistência de embarcações e submarinosjoao silvaNo ratings yet
- Ead Moc 01 ApaqDocument183 pagesEad Moc 01 ApaqChristian Roberto CarvalhoNo ratings yet
- Projeto do Navio, Expansão do Chapeamento e NestingDocument95 pagesProjeto do Navio, Expansão do Chapeamento e NestingJDPNeto100% (1)
- Considerações sobre comboios de 9.000 toneladas na Hidrovia Tietê-ParanáDocument56 pagesConsiderações sobre comboios de 9.000 toneladas na Hidrovia Tietê-ParanáTayseMotaNo ratings yet
- Equilíbrio de embarcações por métodos hidrostáticosDocument68 pagesEquilíbrio de embarcações por métodos hidrostáticosGabriel BaroniNo ratings yet
- BERNARDINO - Estabilidade de Cursos Dagua - Dissertacao MestradoDocument392 pagesBERNARDINO - Estabilidade de Cursos Dagua - Dissertacao MestradopierremsNo ratings yet
- Construção e características de petroleiros SuezmaxDocument61 pagesConstrução e características de petroleiros Suezmaxalanrego_agpr100% (3)
- Automação NavalDocument19 pagesAutomação NavalJader Vinicius100% (1)
- Aulas UPE - Módulo 3 - Parte 1 - ResistênciaDocument66 pagesAulas UPE - Módulo 3 - Parte 1 - ResistênciaToninho PorpinoNo ratings yet
- Engenharia OffshoreDocument2 pagesEngenharia OffshoreEvandro Cetrangolo100% (1)
- Modelação Geométrica do CascoDocument33 pagesModelação Geométrica do CascoMarcelo DiboNo ratings yet
- Cálculo de Pesos e Centros PDFDocument12 pagesCálculo de Pesos e Centros PDFJDPNetoNo ratings yet
- Manual SHT Obra HotelariaDocument131 pagesManual SHT Obra HotelariaAnonymous hE0IDl7No ratings yet
- Arranjo Geral de Embarcacoes PDFDocument2 pagesArranjo Geral de Embarcacoes PDFGelsonNo ratings yet
- Quinta Lista de Exercícios de Arquitetura Naval e OffshoreDocument3 pagesQuinta Lista de Exercícios de Arquitetura Naval e OffshoreToninho PorpinoNo ratings yet
- Prova MAC MAMDocument4 pagesProva MAC MAMSergio CosentiniNo ratings yet
- Exercicio Modelo 01 - Viga NavioDocument21 pagesExercicio Modelo 01 - Viga Navionoaceshigh100% (1)
- Coeficientes de Forma do CascoDocument30 pagesCoeficientes de Forma do Cascojconde1948100% (1)
- PRMDocument105 pagesPRMAnonymous liMXP6QNo ratings yet
- Dimensionamento de defesas portuárias segundo a NBR 9782Document22 pagesDimensionamento de defesas portuárias segundo a NBR 9782Lana AbrantezNo ratings yet
- 04-Arq 001 Cfaq-I-M 2013Document65 pages04-Arq 001 Cfaq-I-M 2013Aélcio SantosNo ratings yet
- Metereologia e Oceânografia - Moc-03Document192 pagesMetereologia e Oceânografia - Moc-03MARINHA MERCANTENo ratings yet
- Naval Sistemas AuxiliaresDocument136 pagesNaval Sistemas Auxiliaresmysael87100% (1)
- Análise Global Dinâmica de Um Riser FlexívelDocument88 pagesAnálise Global Dinâmica de Um Riser FlexívelcidadedoconcretoeacoNo ratings yet
- Apostila - PNV2441 (Rev2010)Document54 pagesApostila - PNV2441 (Rev2010)Anonymous swEs7SEgNo ratings yet
- PortoDocument72 pagesPortoGoD Da DerivadaNo ratings yet
- Sistema hidráulico de gruaDocument69 pagesSistema hidráulico de gruaGelson TchiloiaNo ratings yet
- Apostila de Dinâmica II - V26!11!2009Document129 pagesApostila de Dinâmica II - V26!11!2009Iranilson JuniorNo ratings yet
- Implementação e Avaliação de Uma Metodologia Fortemente Acoplada para Análise de Sistemas Flutuantes OffshoreDocument135 pagesImplementação e Avaliação de Uma Metodologia Fortemente Acoplada para Análise de Sistemas Flutuantes OffshoreElói AraújoNo ratings yet
- A Percepção Do Aluno Sobre A Didática e o Currículo Dos Cursos de EngenhariaDocument16 pagesA Percepção Do Aluno Sobre A Didática e o Currículo Dos Cursos de EngenhariaElói AraújoNo ratings yet
- Flambagem de estruturas sob compressão axialDocument67 pagesFlambagem de estruturas sob compressão axialElói AraújoNo ratings yet
- Análise de Confiabilidade Estrutural de Pórticos Metálicos Planos Com Ligações SemirrígidasDocument134 pagesAnálise de Confiabilidade Estrutural de Pórticos Metálicos Planos Com Ligações SemirrígidasElói AraújoNo ratings yet
- Análise de Múltiplos Vãos Livres de Dutos SubmarinosDocument278 pagesAnálise de Múltiplos Vãos Livres de Dutos SubmarinosElói AraújoNo ratings yet
- Avaliação de Confiabilidade de Vigas Metálicas Dimensionadas Pela NBR 8800Document129 pagesAvaliação de Confiabilidade de Vigas Metálicas Dimensionadas Pela NBR 8800Elói AraújoNo ratings yet
- Programa de prova sobre mecânica dos fluidos e transportesDocument103 pagesPrograma de prova sobre mecânica dos fluidos e transportesAntonio AndradeNo ratings yet
- 7 Fundacoes Profundas Carga AdmissivelDocument63 pages7 Fundacoes Profundas Carga AdmissivelMarcos Noronha100% (1)
- Semiótica Do IphoneDocument3 pagesSemiótica Do IphoneAndré SilvaNo ratings yet
- O papel do psicólogo clínico numa equipa de saúde mental infantilDocument7 pagesO papel do psicólogo clínico numa equipa de saúde mental infantilPetraAlexandraNo ratings yet
- Apostila de Liderança Arca Da Aliança ProntaDocument41 pagesApostila de Liderança Arca Da Aliança ProntaPr. Sidney100% (1)
- Pienso, Luego Creo La Teoria Makuna Del Mundo PDFDocument5 pagesPienso, Luego Creo La Teoria Makuna Del Mundo PDFManuelEduardoAndradePalmaNo ratings yet
- TCT e prática terminológicaDocument18 pagesTCT e prática terminológicaTaynã NavesNo ratings yet
- A constituição da antropologia: problemática e métodoDocument28 pagesA constituição da antropologia: problemática e métodojairpopperNo ratings yet
- Os sete princípios da sabedoria toltecaDocument12 pagesOs sete princípios da sabedoria toltecaluckyoliver100% (1)
- Cultura política e democratização: uma crítica às teorias da transiçãoDocument12 pagesCultura política e democratização: uma crítica às teorias da transiçãoMaria Cláudia ReisNo ratings yet
- Vigotski - para Alem Da Psicologia CognitivaDocument12 pagesVigotski - para Alem Da Psicologia CognitivaRossanaFlorNo ratings yet
- A instituição imaginária da sociedadeDocument78 pagesA instituição imaginária da sociedadeJosé VilemaNo ratings yet
- A Transposição Didática Como Intermediadora Entre o Conhecimento Científico e o Conhecimento Escolar PDFDocument16 pagesA Transposição Didática Como Intermediadora Entre o Conhecimento Científico e o Conhecimento Escolar PDFjessicavvvvvvNo ratings yet
- Exemplo Pré-ProjetoDocument11 pagesExemplo Pré-ProjetoRicardo MoreiraNo ratings yet
- CHS 2014 - Apostila de Processos Administrativos 2Document297 pagesCHS 2014 - Apostila de Processos Administrativos 2YronwerysNo ratings yet
- O trabalho do tarólogo: cuidados e responsabilidadesDocument11 pagesO trabalho do tarólogo: cuidados e responsabilidadesritaiazevedoNo ratings yet
- Maria Narcisa GoncalvesDocument141 pagesMaria Narcisa GoncalvesadivinhoeuNo ratings yet
- A Paisagem e o Geossistema Como Possibilidade de Leitura Da Expressão Do Espaço Sócio-Ambiental RuralDocument20 pagesA Paisagem e o Geossistema Como Possibilidade de Leitura Da Expressão Do Espaço Sócio-Ambiental RuralSimone CristianoNo ratings yet
- Cultura e Direito no primeiro ciclo do Culturalismo alemãoDocument47 pagesCultura e Direito no primeiro ciclo do Culturalismo alemãoe3l3No ratings yet
- Neurolinguística discursiva e afasiaDocument31 pagesNeurolinguística discursiva e afasiaJuliana ChalubNo ratings yet
- Introdução à Geomorfologia: estudo do relevoDocument43 pagesIntrodução à Geomorfologia: estudo do relevoDarlan MarianoNo ratings yet
- As Dificuldades de Aprendizagem (Griffo)Document18 pagesAs Dificuldades de Aprendizagem (Griffo)Lucas MachadoNo ratings yet
- Conceito de Geracao PDFDocument20 pagesConceito de Geracao PDFteowbNo ratings yet
- Teorias JornalismoDocument3 pagesTeorias JornalismoAmandaDominguesNo ratings yet
- Metodologia de Pesquisa Científica em Sistemas ColaborativosDocument26 pagesMetodologia de Pesquisa Científica em Sistemas ColaborativosSolenir FigueredoNo ratings yet
- Selin Caderno de Resumos Versao Publicada PDFDocument110 pagesSelin Caderno de Resumos Versao Publicada PDFlizardonNo ratings yet
- As Aptidões Na Avaliação Da InteligênciaDocument14 pagesAs Aptidões Na Avaliação Da InteligênciaMatheus Henrique100% (1)
- Modelo Projeto Pesquisa SBSMDocument12 pagesModelo Projeto Pesquisa SBSMLaurenny AraujoNo ratings yet
- Neoconstitucionalismo e Teoria da InterpretaçãoDocument22 pagesNeoconstitucionalismo e Teoria da InterpretaçãoAnonymous PaHSbiOCNo ratings yet
- Habitus Elias e BourdieauDocument8 pagesHabitus Elias e BourdieauManoel Cláudio RochaNo ratings yet
- Conversas com pós-graduandosDocument6 pagesConversas com pós-graduandosGuilherme AndradeNo ratings yet
- Elementos de Filosofia MoralDocument236 pagesElementos de Filosofia MoralMark Ferrine100% (2)