Impact Factor(JCC): 1.5548 - This article can be downloaded from www.impactjournals.
us
IMPACT: International Journal of Research in
Engineering & Technology (IMPACT: IJRET)
ISSN(E): 2321-8843; ISSN(P): 2347-4599
Vol. 2, Issue 7, Jul 2014, 1-12
Impact Journals
AUTONOMOUS NAVIGATION OF A LUNAR EXCAVATION ROBOT USING
ARTIFICIAL POTENTIAL FIELD METHOD
ADITYA KAMATH
Manipal University, Karnataka, India
ABSTRACT
NASA Lunabotics Mining Competition is an annual robotics competition organized by NASA Kennedy Space
Center at their Visitors Complex in Florida every year. In May 2013, a team from Manipal University participated in the
4
th
Annual Lunabotics Mining Competition. The participating teams need to develop a tele-operated or automatic lunar
excavation robot to mine lunar soil (regolith) on a simulated lunar surface. This article presents the methods used by the
team in order to achieve full autonomy of the robot for the traversal of the pre-described arena. This paper describes the
project from the formulation of the navigation algorithm to the simulation in detail keeping focus on the basic and specific
functionality of the robot.
KEYWORDS: Mobile Robot, Autonomous Navigation, NASA Lunabotics Mining Competition, Artificial Potential
Field Method, Encoder Based Tracking
I. INTRODUCTION
Robo Manipal, the official robotics team of MIT, Manipal was formed in the August of 2010 and participates in
national and international level robotics competitions. In 2013, the team participated in the 4
th
NASA Lunabotics Mining
Competition [1] and developed a lunar excavation robot with a teleoperation system. The team stood #19 in the Joe Kosmo
Award for Excellence from 50 teams. In order to achieve more points in further versions of the competition, the team
developed a plan for autonomous control of the lunar robot (called Lunabot). The plan involved modification of only the
systems that failed or did not perform to the teams satisfaction improvements to the telemetry system and an autonomous
navigation system. The team decided on the implementation of the Artificial Potential Field Method for the autonomous
navigation. This article describes the research of this method and the development of the system for simulation.
II. NASA LUNABOTICS MINING COMPETITION
NASA conducts its annual Lunabotics Mining Competition every year since 2010 to encourage and enhance
practical education and promote interest in space and science, technology, engineering and mathematics (STEM).
NASA also encourages participating teams in the field of technical management or more specifically, systems engineering.
This event is attended by teams from all over the world and in May 2013, the competition saw 50 student teams from across
6 continents.
Each participating team must build a teleoperated or autonomous lunar excavator which can mine and deposit a
minimum of 10 kilograms of lunar regolith. This robot has to traverse a 7.38m by 3.88m simulated lunar surface.
2 Aditya Kamath
Index Copernicus Value: 3.0 - Articles can be sent to editor@impactjournals.us
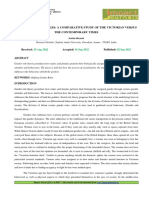
Figure 1: Lunar Arena (Lun Arena) [1]
The robot, starting from one of the four randomly chosen starting points has to avoid obstacles (rocks and craters)
to reach the mining zone where the excavation operation has to be carried out. The robot has to move back across the same
path and dump the mined soil in the collection box (or LunaBin). The judging will be done according to a scoring system
where points will be added for weight of the lunar soil mined, dust tolerant design, ability to demonstrate measurement of
power usage and autonomy.
III. THE ROBO MANIPAL LUNABOT
The robot design was a one year process and was accepted as a Junior Year Industrial Training Project by the
department of Electronics and Communication Engineering.
Figure 2: Isometric View of the Lunabot
Mechanically, the robot was chosen to be a four wheeled differential drive. Additionally, the robot was equipped
with a vertically sliding bucket excavator and a swiveling hopper for the dumping of the excavated regolith in the collection
box.
The mechanical system was developed by in-house designed and produced mechanisms and commercial
off-the-shelf (COTS) products. The electrical and software system was designed initially to do the following tasks:
Connect to NASAs network
Process input keyboard strokes to send control signals via Wi-Fi
Autonomous Navigation of a Lunar Excavation Robot Using Artificial Potential Field Method 3
Impact Factor(JCC): 1.5548 - This article can be downloaded from www.impactjournals.us
Receive control signals onboard the robot
Process control signals and send values to the electronic control unit (ECU) to drive the robot.
Provide telemetry to the system. Access state details of motors, shaft encoders and the current and voltage states of
the robot overall.
However, as a need for the development of an autonomous system rose, the electrical and software system was
modified but the telemetry was maintained.
Figure 3: Electrical and Software System
The only thing that changed in the final electrical system are the four sensors for initial orientation measurement as
described in Figure 10 and the 9 Infrared Range Finding sensors (Figure 5) according to the sensor placement on the
Khepera III (Figure 4) robot. The sensors on the Khepera III platform are placed at the distances shown in the figure below.
All measurements are in meters. This platform was used for the simulation of the Lunabots autonomy system.
Figure 4: Sensor Placement on the Khepera III [2]
4 Aditya Kamath
Index Copernicus Value: 3.0 - Articles can be sent to editor@impactjournals.us
Figure 5: Sensor Placement on the Lunabot According to the Placement (Angular) on the Khepera III
IV. TRAJECTORY DESCRIPTION
This section describes the basic idea behind the motion of the robot i.e. how the trajectory is to be decided.
According to the problem statement of the competition, there are three zones in the LunArena the start zone, the obstacle
zone and the mining zone. As only the obstacle zone contains the obstacles (rocks and craters), the Artificial Potential Field
Method will be applied in that zone only. In the competition attempts at NASA Kennedy Space Center in May, 2013,
it was observed that the mechanical structure of the robot was capable of traversing over craters without any hindrance.
Hence, in this implementation, only the rocks are considered as obstacles.
The following figures describe the motion of the robot from the start position of the robot till the beginning of the
mining zone.
Figure 6: Detection of Angle towards Target 1. This Starting Position is Assumed
(Can be One of 4 Start Positions and Directions According to the Problem Statement)
Autonomous Navigation of a Lunar Excavation Robot Using Artificial Potential Field Method 5
Impact Factor(JCC): 1.5548 - This article can be downloaded from www.impactjournals.us
Figure 6 describes the detection of the position of the robot and the calculation of the angle the robot has to turn to
face Target 1 (middle of the line between the start and the obstacle zones) using the GTA (Go to Angle) vector.
The following method was used for the same:
Initialize [x_inity_init] (calculated), initial coordinates of the robot, the top left of the image being the origin.
Initialize [x_target1 y_target1], final coordinates of the robot, i.e, the coordinates of Target 1
Find angle to Target 1 using atan2(y_target1 y_init, x_target1 x_init)
Figure 7: The Vector Directing the Robot towards Target 1
Figure 7 shows vector GTT (Go to Target) which drives the robot till Target 1.
Figure 8: Vector Obtained after APF Calculations. Vector Moves towards Target While Avoiding Obstacles
6 Aditya Kamath
Index Copernicus Value: 3.0 - Articles can be sent to editor@impactjournals.us
Figure 9: The Robot at its Intermediate Position in the Middle of the Mining Zone
The above figures describe the motion in the obstacle zone. The F
total
vector shown is described in Section VII.
This vector is calculated using the Artificial Potential Field Method and drives the robot towards Target 2
(middle of the line between the obstacle and the mining zone).
V. INITIAL POSITION AND ORIENTATION DETERMINATION
According to the problem statement provided by NASA Kennedy Space Center, the participating teams are not
allowed to provide initial position and orientation details to the robot during the setup time. Moreover, if the robot is to
operate in the autonomous mode, no positional data is to be provided to the robot from the mission control station
(i.e. no human contact except the signal to start). In accordance to the problem statement, the robot is placed in one of the
four start locations in the start zone in one of the four directions North, East, West, and South. As the options for initial
position and heading were limited, a simple algorithm was developed. Four IR based range-finding sensors were placed,
one on each side of the robot Front, Left, Right, Back, as described in Figure 10.
Figure 10: Locations of the Sensors for Initial Position Calculation
Autonomous Navigation of a Lunar Excavation Robot Using Artificial Potential Field Method 7
Impact Factor(JCC): 1.5548 - This article can be downloaded from www.impactjournals.us
Once the sensors were fixed, the following algorithm was followed.
Initiate Front, Back, Left and Right sensors
Measure values of the sensors
Check with ranges calculated for each of the four initial positions and directions and decide initial position and
heading. Since the robot will start from one of the four pre-defined positions and one of the four cardinal directions,
the sensor value ranges for each position was calculated and stored.
Using exact sensor values, initiate values for the rotary shaft encoders.
Note that these sensors were used only for the calculation of the initial position of the robot and not for the obstacle
avoidance.
VI. POSITIONAL TRACKING
To follow the Artificial Potential Field Method, it was imperative to track the robot. GPS tracking couldnt be used
as it was found to be inaccurate over a small area. Moreover, GPS cannot be used in lunar applications. The usage of optical
shaft encoders were involved. As a four wheeled differential drive was incorporated, shaft encoders were attached to each of
the four motor shafts. The average of the movements of each wheel encoder was calculated to determine the path of the
center of mass of the robot. The following steps were used:
Store initial coordinates.
Using telemetry system, monitor movements of each wheel encoder.
Convert each rotation of each wheel encoder into linear distance travelled. Accordingly, track the exact location of
the robot in the workspace.
VII. ARTIFICIAL POTENTIAL FIELD METHOD
The potential field method is widely used for path planning in mobile robotics owing to its mathematical simplicity.
With leading publications from multiple authors in the past decade, the potential field method is used commonly as a method
of navigation for autonomous robots. Latombe, in 1991 [3] described the basic concept of the potential field method fill
the robots workspace with an artificial or virtual potential field. The robot is attracted to the target and repelled by the
obstacles. Although, in most examples of implementation, the environment is dynamic the robot and the target are
continuously moving in this case, a stationary target is considered.
In a paper authored by Ge and Cui [4], a representation of the attractive and repulsive potential field functions are
mentioned which will be used in this paper. In convention, the attractive potential field is described as a function of the
distance between the robot and the target when the target is fixed in the robot workspace. However, as described in the
research by Ge and Cui, a new function was developed which also considered the velocity of the robot and the target,
considering the target is moving. Using the same equation but considering a stationary target, we get the following function
(Equation 1):
u
utt
(p, :) = o
p
p
tu
(t) p(t)
m
o
u :(t)
n
(1)
8 Aditya Kamath
Index Copernicus Value: 3.0 - Articles can be sent to editor@impactjournals.us
The target velocity is considered zero. The positions of the robot and the target are described as p(t) and p
tar
(t)
respectively, where each of the position vectors are given in the form of p=[x y]
t
where x and y are the coordinates of the
robot on the defined axes on the lunar arena. The velocity of the robot is defined as v(t) at a given time t.
p
and
v
are
positive scalar parameters while m and n are positive constants.
The virtual attractive force is defined in Equation 2:
F
utt
(p) = u
utt
(p) =
0
ctt
(p)
p
(2)
In terms of both position and velocity, this can be described as
F
utt
(p, :) = F
uttp
(p) + F
utt
(:) (3)
Where, each of the forces can be described as
F
uttp
(p) = mo
p
p
tu
(t) p(t)
m-1
n
R1
(4)
F
utt
(p) = no
u :(t)
n-1
n
vR1
(5)
Where n
RT
and n
VRT
are unit vector pointing from the robot to the target and the unit vector denoting the relative
velocity direction with respect to the robot, (i.e the robot velocity vector) respectively
To consider the obstacles along the way, Ge and Cui involved the relative positions and velocities between the
robot and each of the obstacles, while considering moving obstacles. In the similar manner as before, we can describe the
equations of the repulsive potential while considering the relative velocity between the robot and the obstacle as the robot
velocity itself. Hence modifying the equations, we get the following function:
u
cp
(p, :) =
`
1
1
1
1
u i p
s
(p, p
obs
) p
m
(:) p
0
or : u
p [
1
p
s
(p,p
cbs
)-p
m
()
1
p
0
,
i u < p
s
(p, p
obs
) p
m
(:) < p
0
onJ : > u
not JcincJ i : > u onJ p
s
(p, p
obs
) p
m
(:) < u
(6)
Where p
s
(p, p
obs
) is the minimum distance between the robot and the obstacle and p
m
(:) is the distance traveled
by the robot if the robot velocity equals zero when an acceleration of a
max
is applied.
Similar to the attractive force, the repulsive force can be defined by Equation 7
F
cp
(p, :) = u
cp
(p, :) = (
p
u
cp
(p, :) +
u
cp
(p, :) (7)
Considering multiple obstacles, we can describe the total repulsive force as a summation of all repulsive forces
from all obstacles.
F
cp
= _ F
cp
n
cbs
=1
(8)
And hence, the total force acting on the robot can be defined as the summation of the total attractive forces and the
total repulsive forces.
F
totuI
= F
utt
+F
cp
(9)
Autonomous Navigation of a Lunar Excavation Robot Using Artificial Potential Field Method 9
Impact Factor(JCC): 1.5548 - This article can be downloaded from www.impactjournals.us
SIMULATION
The total force obtained determines the motion of the robot at that particular instant. Since the functions applied
provide with the x and y values of the force, the magnitude and angle of the total force applied is obtained. Using the angle
of the force vector, the angular velocity is determined and the magnitude of the force corresponds to the linear velocity.
The left and right motor speeds can then be calculated using the following unicycle to differential drive model using the
following code.
r = v/R + (w*L) / (2*R);
l = v/R - (w*L) / (2*R);
In the above expressions, r and l describe the right and left motor speeds respectively, v describes the linear
velocity, w is the angular velocity and L and R stand for the distance between the left and right wheels and the wheel radius
respectively. The angular and linear velocities are varied using a PID regulator.
The simulation was performed using the Sim. I Am [5] robotics simulator developed by the Georgia Robotics and
Intelligent Systems Laboratory (GRITS Lab) [6] at Georgia Tech [7]. In this simulation, the artificial potential field concepts
were applied on a Khepera III robot, since the sensor placement was incorporated from the same. Below are some images
from the simulation.
Figure 11: The Robot at its Starting Position
Figure 12: The Graph of the Angle of the Robot. The Dotted Lines Describe the Reference
Angle While the Solid Line Describes the Actual Angle
10
Index Copernicus Value: 3.0
Figure
Figure 14: Steering Angle Graph at t
The simulation was successful considering the robot managed to reach the target destination without collisions on
any of the obstacles.
Index Copernicus Value: 3.0 - Articles can be sent to editor@impactjournals.us
Figure 13: The Robot at an Intermediate Stage
Angle Graph at the Intermediate Stage Described i
Figure 15: Robot at Goal
The simulation was successful considering the robot managed to reach the target destination without collisions on
Aditya Kamath
editor@impactjournals.us
e Intermediate Stage Described in Figure 13
The simulation was successful considering the robot managed to reach the target destination without collisions on
Autonomous Navigation of a Lunar Excavation Robot Using Artificial Potential Field Method 11
Impact Factor(JCC): 1.5548 - This article can be downloaded from www.impactjournals.us
FUTURE WORK
The application of the Artificial Potential Field Method described above contains specific shortcomings which need
to be rectified. Firstly, depth sensors will be incorporated to accurately identify craters as well. These craters will also be
identified as obstacles and will be avoided using the methods described above.
This application also describes the trajectory of the robot from the start position till Target 2 [Section IV].
A pre-programmed sequence will be added to this application so as to allow the robot to dig for regolith from Target 2 and
return to the start zone to dump the regolith in the LunaBin.
CONCLUSIONS
This article describes an application of the Artificial Field Method for an international student competition.
This paper incorporates the description of all aspects of the autonomy system of the robot from the sensor placement to the
algorithm. Additionally, this research and development serves as a reference for robots participating in student competitions
where a robot has to traverse on an unknown workspace.
ACKNOWLEDGEMENTS
The author thanks the faculty and the student team members of Robo Manipal, the official robotics team of
Manipal Institute of Technology for their support and dedication to the team. The author also thanks
Mr. Krystian Meresiski and Mr. Marvin Rueppel, interns from AGH University of Science and Technology,
Krakow (Poland) and ETH Zurich (Switzerland) respectively, who worked with the team as interns in the summer of 2014
on this project and aided in preliminary research.
Also acknowledged is the exceptional teaching skills of the instructor and teaching assistants of the
course Control of Mobile Robots by Georgia Institute of Technology.
REFERENCES
1. NASAs 4
th
Annual Lunabotics Mining Competition, 2014:
http://www.nasa.gov/offices/education/centers/kennedy/technology/lunabotics.html
2. Khepera III Specifications, K-Team Mobile Robotics,
http://www.k-team.com/mobile-robotics-products/khepera-iii/specifications
3. Latombe, J. 1991. Robot Motion Planning, Kluwer Academic Publishers: Boston.
4. Ge, S.S. and Cui, Y.J., 2002, Dynamic Motion Planning for Mobile Robots using Potential Field Method,
Autonomous Robots 13, 207-222.
5. Sim.I.Am, The Math Works, Inc, File Exchange
http://www.mathworks.com/matlabcentral/fileexchange/40860-sim-i-am
6. GRITS Lab, Georgia Robotics and Intelligent Systems Lab, Georgia Institute of Technology,
http://gritslab.gatech.edu/home/
7. Control of Mobile Robots, Georgia Institute of Technology, https://www.coursera.org/course/conrob
You might also like
- 19-11-2022-1668837986-6-Impact - Ijrhal-2. Ijrhal-Topic Vocational Interests of Secondary School StudentsDocument4 pages19-11-2022-1668837986-6-Impact - Ijrhal-2. Ijrhal-Topic Vocational Interests of Secondary School StudentsImpact JournalsNo ratings yet
- 21-09-2022-1663757720-6-Impact - Ijranss-3. Ijranss - The Role and Objectives of Criminal LawDocument8 pages21-09-2022-1663757720-6-Impact - Ijranss-3. Ijranss - The Role and Objectives of Criminal LawImpact JournalsNo ratings yet
- 12-11-2022-1668238142-6-Impact - Ijrbm-01.Ijrbm Smartphone Features That Affect Buying Preferences of StudentsDocument7 pages12-11-2022-1668238142-6-Impact - Ijrbm-01.Ijrbm Smartphone Features That Affect Buying Preferences of StudentsImpact JournalsNo ratings yet
- 19-11-2022-1668838190-6-Impact - Ijrhal-3. Ijrhal-A Study of Emotional Maturity of Primary School StudentsDocument6 pages19-11-2022-1668838190-6-Impact - Ijrhal-3. Ijrhal-A Study of Emotional Maturity of Primary School StudentsImpact JournalsNo ratings yet
- 21-09-2022-1663757902-6-Impact - Ijranss-4. Ijranss - Surgery, Its Definition and TypesDocument10 pages21-09-2022-1663757902-6-Impact - Ijranss-4. Ijranss - Surgery, Its Definition and TypesImpact JournalsNo ratings yet
- Effect of Sahaja Yoga Meditation in Reducing Anxiety Level of Class Vi Students Towards English As A Second LanguageDocument8 pagesEffect of Sahaja Yoga Meditation in Reducing Anxiety Level of Class Vi Students Towards English As A Second LanguageImpact JournalsNo ratings yet
- 09-12-2022-1670567289-6-Impact - Ijrhal-06Document17 pages09-12-2022-1670567289-6-Impact - Ijrhal-06Impact JournalsNo ratings yet
- 14-11-2022-1668421406-6-Impact - Ijrhal-01. Ijrhal. A Study On Socio-Economic Status of Paliyar Tribes of Valagiri Village AtkodaikanalDocument13 pages14-11-2022-1668421406-6-Impact - Ijrhal-01. Ijrhal. A Study On Socio-Economic Status of Paliyar Tribes of Valagiri Village AtkodaikanalImpact JournalsNo ratings yet
- 09-12-2022-1670567569-6-Impact - Ijrhal-05Document16 pages09-12-2022-1670567569-6-Impact - Ijrhal-05Impact JournalsNo ratings yet
- 25-10-2022-1666681548-6-IMPACT - IJRHAL-4. IJRHAL-Challenges of Teaching Moral and Ethical Values in An Age of Instant GratificationDocument4 pages25-10-2022-1666681548-6-IMPACT - IJRHAL-4. IJRHAL-Challenges of Teaching Moral and Ethical Values in An Age of Instant GratificationImpact JournalsNo ratings yet
- 15-10-2022-1665806338-6-IMPACT - IJRBM-1. IJRBM Theoretical and Methodological Problems of Extra-Budgetary Accounting in Educational InstitutionsDocument10 pages15-10-2022-1665806338-6-IMPACT - IJRBM-1. IJRBM Theoretical and Methodological Problems of Extra-Budgetary Accounting in Educational InstitutionsImpact JournalsNo ratings yet
- 22-09-2022-1663824012-6-Impact - Ijranss-5. Ijranss - Periodontics Diseases Types, Symptoms, and Its CausesDocument10 pages22-09-2022-1663824012-6-Impact - Ijranss-5. Ijranss - Periodontics Diseases Types, Symptoms, and Its CausesImpact JournalsNo ratings yet
- 28-10-2022-1666956219-6-Impact - Ijrbm-3. Ijrbm - Examining Attitude ...... - 1Document10 pages28-10-2022-1666956219-6-Impact - Ijrbm-3. Ijrbm - Examining Attitude ...... - 1Impact JournalsNo ratings yet
- 12-10-2022-1665566934-6-IMPACT - IJRHAL-2. Ideal Building Design y Creating Micro ClimateDocument10 pages12-10-2022-1665566934-6-IMPACT - IJRHAL-2. Ideal Building Design y Creating Micro ClimateImpact JournalsNo ratings yet
- 11-10-2022-1665489521-6-IMPACT - IJRHAL-Analysing The Matrix in Social Fiction and Its Relevance in Literature.Document6 pages11-10-2022-1665489521-6-IMPACT - IJRHAL-Analysing The Matrix in Social Fiction and Its Relevance in Literature.Impact JournalsNo ratings yet
- Influence of Erotic Nollywood Films Among Undergraduates of Lead City University, Ibadan, NigeriaDocument12 pagesInfluence of Erotic Nollywood Films Among Undergraduates of Lead City University, Ibadan, NigeriaImpact JournalsNo ratings yet
- 02-09-2022-1662112193-6-Impact - Ijrhal-1. Ijrhal - Shifting Gender Roles A Comparative Study of The Victorian Versus The Contemporary TimesDocument12 pages02-09-2022-1662112193-6-Impact - Ijrhal-1. Ijrhal - Shifting Gender Roles A Comparative Study of The Victorian Versus The Contemporary TimesImpact JournalsNo ratings yet
- 27-10-2022-1666851544-6-IMPACT - IJRANSS-2. IJRANSS - A Review On Role of Ethics in Modern-Day Research Assignment - 1Document6 pages27-10-2022-1666851544-6-IMPACT - IJRANSS-2. IJRANSS - A Review On Role of Ethics in Modern-Day Research Assignment - 1Impact JournalsNo ratings yet
- 20-09-2022-1663649149-6-Impact - Ijrhal-2. Ijrhal - A Review of Storytelling's Role and Effect On Language Acquisition in English Language ClassroomsDocument10 pages20-09-2022-1663649149-6-Impact - Ijrhal-2. Ijrhal - A Review of Storytelling's Role and Effect On Language Acquisition in English Language ClassroomsImpact JournalsNo ratings yet
- 19-09-2022-1663587287-6-Impact - Ijrhal-3. Ijrhal - Instability of Mother-Son Relationship in Charles Dickens' Novel David CopperfieldDocument12 pages19-09-2022-1663587287-6-Impact - Ijrhal-3. Ijrhal - Instability of Mother-Son Relationship in Charles Dickens' Novel David CopperfieldImpact JournalsNo ratings yet
- 05-09-2022-1662375638-6-Impact - Ijranss-1. Ijranss - Analysis of Impact of Covid-19 On Religious Tourism Destinations of Odisha, IndiaDocument12 pages05-09-2022-1662375638-6-Impact - Ijranss-1. Ijranss - Analysis of Impact of Covid-19 On Religious Tourism Destinations of Odisha, IndiaImpact JournalsNo ratings yet
- 07-09-2022-1662545503-6-Impact - Ijranss-2. Ijranss - Role of Bio-Fertilizers in Vegetable Crop Production A ReviewDocument6 pages07-09-2022-1662545503-6-Impact - Ijranss-2. Ijranss - Role of Bio-Fertilizers in Vegetable Crop Production A ReviewImpact JournalsNo ratings yet
- 24-09-2022-1664015374-6-Impact - Ijranss-6. Ijranss - Patterns of Change Among The Jatsas Gleaned From Arabic and Persian SourcesDocument6 pages24-09-2022-1664015374-6-Impact - Ijranss-6. Ijranss - Patterns of Change Among The Jatsas Gleaned From Arabic and Persian SourcesImpact JournalsNo ratings yet
- 28-09-2022-1664362344-6-Impact - Ijrhal-4. Ijrhal - Understanding The Concept of Smart City and Its Socio-Economic BarriersDocument8 pages28-09-2022-1664362344-6-Impact - Ijrhal-4. Ijrhal - Understanding The Concept of Smart City and Its Socio-Economic BarriersImpact JournalsNo ratings yet
- 01-10-2022-1664607817-6-Impact - Ijrbm-2. Ijrbm - Innovative Technology in Indian Banking Sector-A Prospective AnalysisDocument4 pages01-10-2022-1664607817-6-Impact - Ijrbm-2. Ijrbm - Innovative Technology in Indian Banking Sector-A Prospective AnalysisImpact JournalsNo ratings yet
- Effect of Organizational Commitment On Research and Development Performance of Academics: An Empirical Analysis in Higher Educational InstitutionsDocument12 pagesEffect of Organizational Commitment On Research and Development Performance of Academics: An Empirical Analysis in Higher Educational InstitutionsImpact JournalsNo ratings yet
- Comparison of Soil Properties Collected From Nalgonda, Ranga Reddy, Hyderabad and Checking Its Suitability For ConstructionDocument8 pagesComparison of Soil Properties Collected From Nalgonda, Ranga Reddy, Hyderabad and Checking Its Suitability For ConstructionImpact JournalsNo ratings yet
- 25-08-2022-1661426015-6-Impact - Ijrhal-8. Ijrhal - Study of Physico-Chemical Properties of Terna Dam Water Reservoir Dist. Osmanabad M.S. - IndiaDocument6 pages25-08-2022-1661426015-6-Impact - Ijrhal-8. Ijrhal - Study of Physico-Chemical Properties of Terna Dam Water Reservoir Dist. Osmanabad M.S. - IndiaImpact JournalsNo ratings yet
- 29-08-2022-1661768824-6-Impact - Ijrhal-9. Ijrhal - Here The Sky Is Blue Echoes of European Art Movements in Vernacular Poet Jibanananda DasDocument8 pages29-08-2022-1661768824-6-Impact - Ijrhal-9. Ijrhal - Here The Sky Is Blue Echoes of European Art Movements in Vernacular Poet Jibanananda DasImpact JournalsNo ratings yet
- Study and Investigation On The Red and Intangible Cultural Sites in Guangdong - Chasing The Red Mark and Looking For The Intangible Cultural HeritageDocument14 pagesStudy and Investigation On The Red and Intangible Cultural Sites in Guangdong - Chasing The Red Mark and Looking For The Intangible Cultural HeritageImpact JournalsNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Numerical MethodsDocument9 pagesNumerical Methodsshaz_donNo ratings yet
- Newtons Law of MotionDocument14 pagesNewtons Law of MotionJohn Irvin M. AbatayNo ratings yet
- Math II Tutorial 1Document2 pagesMath II Tutorial 1devang_siNo ratings yet
- Alloy ZN Ni PDFDocument8 pagesAlloy ZN Ni PDFElenaNo ratings yet
- Berco Product FA 6E: General Information Fa 6E 12040002 Idler Group, With Tensioning Device Not Integrated inDocument1 pageBerco Product FA 6E: General Information Fa 6E 12040002 Idler Group, With Tensioning Device Not Integrated inrameshNo ratings yet
- Autocad 2d Module 23 PDFDocument0 pagesAutocad 2d Module 23 PDFRam LamaNo ratings yet
- P Ractical Approaches To Fast Gas Chromatography-Mass Spectrometry Muy BuenoDocument28 pagesP Ractical Approaches To Fast Gas Chromatography-Mass Spectrometry Muy BuenoJavier Joao Lloyd IglesiasNo ratings yet
- Fastners Modeling For MSC - Nastran Finite Element AnalysisDocument20 pagesFastners Modeling For MSC - Nastran Finite Element Analysisabo029No ratings yet
- Chapter 3 Linear KinematicsDocument26 pagesChapter 3 Linear KinematicsKuldeep SinghNo ratings yet
- Crisfield M A Vol 2 Non-Linear Finite Element Analysis of Solids and Structures Advanced TopicsDocument509 pagesCrisfield M A Vol 2 Non-Linear Finite Element Analysis of Solids and Structures Advanced TopicsIffat Siddqiue0% (1)
- Thermo Scientific Pierce Protein Assay Technical HandbookDocument44 pagesThermo Scientific Pierce Protein Assay Technical HandbookAnwar_Madkhali_9172No ratings yet
- Harald J. W. Muller-Kirsten-Electromagnetic Field Theory-World Scientific Publishing Company (2004) PDFDocument203 pagesHarald J. W. Muller-Kirsten-Electromagnetic Field Theory-World Scientific Publishing Company (2004) PDFMonã Hegel BenettiNo ratings yet
- C680Document22 pagesC680dinhtung2210100% (2)
- Group Plant BrochureDocument52 pagesGroup Plant BrochureAnonymous AdofXEYAgE100% (1)
- Lecture 1Document33 pagesLecture 1fatimaasiriNo ratings yet
- Curriculum Vitae: Jnana Ranjan Das 1. Career ObjectiveDocument5 pagesCurriculum Vitae: Jnana Ranjan Das 1. Career ObjectiveJyoti Tecno PowerNo ratings yet
- D Mec Frac Fatigue Part IIDocument38 pagesD Mec Frac Fatigue Part IIsure516vNo ratings yet
- WBUT Btech 2nd Sem 2011 ThemodynamicsDocument7 pagesWBUT Btech 2nd Sem 2011 ThemodynamicsBapi SarkarNo ratings yet
- Gujarat Technological University: W.E.F. AY 2018-19Document3 pagesGujarat Technological University: W.E.F. AY 2018-19SURAJ NAKUMNo ratings yet
- Group Theory PDFDocument280 pagesGroup Theory PDFLuis Cancino Arancibia100% (1)
- SosthenesDocument396 pagesSosthenesAthiesh KumarNo ratings yet
- Experiment #2: Continuous-Time Signal Representation I. ObjectivesDocument14 pagesExperiment #2: Continuous-Time Signal Representation I. ObjectivesMarvin AtienzaNo ratings yet
- Mathematical Methods in Engineering and ScienceDocument1,474 pagesMathematical Methods in Engineering and ScienceSoupramanien KathirvelouNo ratings yet
- 8.012 Physics I: Classical Mechanics: Mit OpencoursewareDocument8 pages8.012 Physics I: Classical Mechanics: Mit OpencoursewareAlexandru CiobanuNo ratings yet
- Mec 424 - Laboratory Report: Free Vibration Experiment - Natural Frequency of Spring Mass System Without DampingDocument24 pagesMec 424 - Laboratory Report: Free Vibration Experiment - Natural Frequency of Spring Mass System Without DampingWan AimanNo ratings yet
- Lateral LoadDocument1 pageLateral LoaderodedNo ratings yet
- Numerical Solution of Seepage Problem of Groundwater FlowDocument5 pagesNumerical Solution of Seepage Problem of Groundwater FlowIOSRjournalNo ratings yet
- Mathematics - Ijmcar - An Approach For Continuous Method For The GeneralDocument12 pagesMathematics - Ijmcar - An Approach For Continuous Method For The GeneralTJPRC PublicationsNo ratings yet
- CGR 16050 2019 2020 1Document1 pageCGR 16050 2019 2020 1Chandan Prasad KushwahaNo ratings yet
- Cylinders Shall Be Produced As Per IS 7285 and Approved by Chief Controller of ExplosiveDocument1 pageCylinders Shall Be Produced As Per IS 7285 and Approved by Chief Controller of ExplosiveAlanka Prasad100% (1)